со
00
Изобретение относится к электротехнике и может найти применение для пуска, синхронизации и ресинхронизации многодвигательного гистерезисного электропривода технологических линий, в котором электродвигатели работают в режиме электрического вала.
Цель изобретения - повышение надежности пуска и синхронизации путем исключения резонансных режимов в области низких частот скольжения.
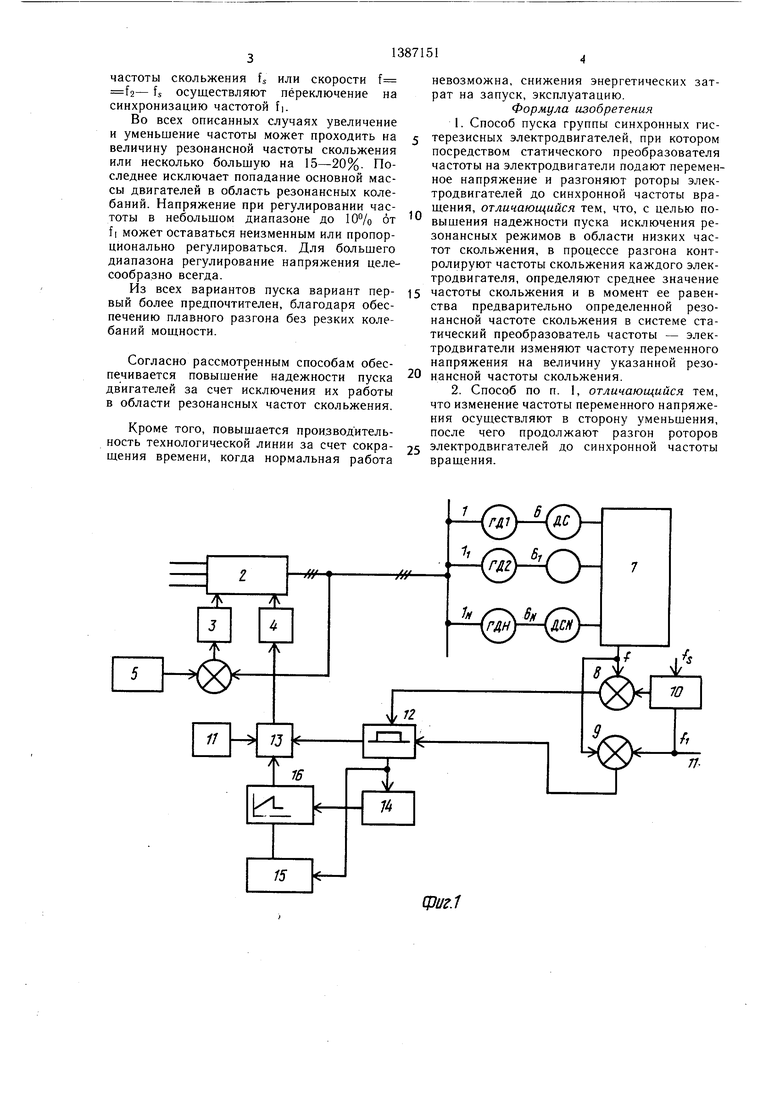
На фиг. 1 и 2 представлена блок-схема устройства для пуска группы синхронных гистерезисных электродвигателей.
В устройстве гистерезисные двигатели 1, 1.1,...,1.N подключены к преобразователю 2 частоты, имеющему канал 3 регулирования напряжения и канал 4 регулирования частоты. Блок 5 осуществляет задание напряжения. Двигатели имеют на валу датчики 6, 6.1,..., 6.N скорости, выходы которых соединены с блоком 7 контроля частоты вращения. Выход последнего подключен к блокам 8 и 9 сравнения, вторые входы которых соединены соответственно с блоком 10 вычитания и задатчиком 11 стабильной частоты fi, а выходы соединены с пороговым дискриминатором 12, выход которого соединен с управляющим входом переключателя 13 и блоками «Запуск 14 и «Сброс 15, выходы которых через задатчик 16 интенсивности соединен с первым входом переключателя 13, второй вход которого соединен с задатчиком 11 стабильной частоты, а выход - с каналом 4 регулирования частоты.
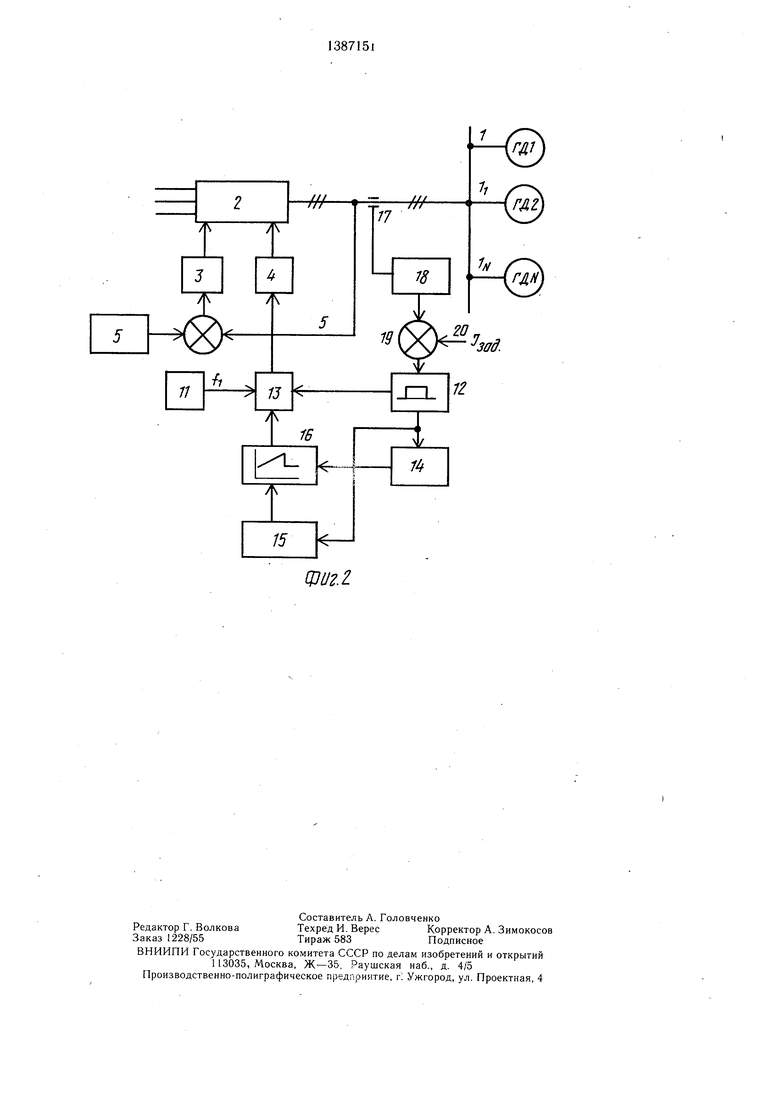
Согласно второму варианту в устройство введен датчик 17 тока (фиг. 2), который через фильтр 18 низких частот соединен с блоком 19 сравнения, второй вход которого соединен с задатчиком 20 тока.
Способ осуществляется следующим образом.
В исходном положении переключатель 13 подключает задатчик 11 стабильной частоты к каналу 4 регулирования частоты. Пуск двигателей 1 происходит при номинальном значении напряжения и частоты. Резонансная частота скольжения fs определяется заранее экспериментально путем фиксации колебаний тока либо мощности.
При пуске одного двигателя контролируется его частота вращения, которой соответствует частота f. При пуске группы двигателей блок 7 определяет среднеарифметическое значение частот вращения группы двигателей на интервале измерения. Поскольку время разгона на много порядков выше времени измерения, то фактически фиксируется текущее значение частоты.
Блок 10 путем вычитания fi-fs определяет частоту, на которой наступает резонанс в системе. По достижении условия fi-L сигнал с выхода блока 8 сравнения переводит пороговый дискриминатор
12 в состояние логический «1, которая с помощью переключателя 13 подключает задатчик 16 интенсивности к каналу 4 регулирования частоты и через блок «Запуск 14
осуществляет запуск задатчика интенсивности. Начальная частота последнего соответствует частоте f, а темп изменения задается по результатам предварительного расчета по основному уравнению движения
„ двигателя. Выходная частота преобразователя в первый момент уменьщается и двигатели в своей основной массе оказываются в синхронизме или в области пред- синхронной. Этим самым исключается их нахождение в области частоты скольжения,
5 где имеет место резонанс.
Плавное увеличение частоты задатчиком 16 интенсивности обеспечивает разгон двигателей до номинальной частоты вращения, по достижении которой блок 9 формиру- . ет сигнал, осуществляющий перевод блока
0 12 в положение логического нуля. Переключатель 13 подключает задатчик стабильной частоты 11 к каналу 4 регулирования частоты. Выходной сигнал блока 12 через блок «Сброс 15 возвращает задатчик 16
5 интенсивности в исходное положение.
Таким образом, осуществляется пуск и синхронизация.
При кратковременном прерывании питания, например, за счет исчезновения напряжения сети после его восстановления
0 необходимо провести ресинхронизацию выбежавших двигателей. По данным блока 7 контроля частоты вращения осуществляется синхронизация преобразователя частоты 2 либо задатчиком 11 стабильной частоты, либо задатчиком 16 иитенсивности в за5 висимости от скорости вращения двигателей с повторением описанного процесса. Согласно второму варианту (фиг. 2) предусматривается непосредственный контроль состояния системы. Фильтр 18 низких частот выделяет низкочастотные колебания тока в области малых частот скольжения и при превышении амплитуды сигнала задания формирует команду на переключение канала регулирования частоты с блока 11 на блок 16 с повторением описанного выще процесса.
5 Другой вариант способа предусматривает увеличение частоты питания на дискретную величину по достижении двигателями резонансной частоты скольжения. Вместо задатчика 16 интенсивности используется второй задатчик стабильной и больщей часто0 ты f2 fi4- fs. Все остальное делается также. При повторном достижении двигателями частоты скольжения fs относительно частоты f2 осуществляется обратное переключение на задатчик 11.
Возможен еще вариант, когда заранее увеличивают частоту питания до уровня f2 fi+ s путем подключения канала регулирования частоты 4 к блоку 16, выполняющему роль задатчика частоты, а по достижении
0
5
частоты скольжения fs или скорости f f2- fs осуществляют переключение на синхронизацию частотой fi.
Во всех описанных случаях увеличение и уменьшение частоты может проходить на величину резонансной частоты скольжения или несколько большую на 15-20%. Последнее исключает попадание основной массы двигателей в область резонансных колебаний. Напряжение при регулировании частоты в небольшом диапазоне до 10% от f 1 может оставаться неизменным или пропорционально регулироваться. Для большего диапазона регулирование напряжения целесообразно всегда.
Из всех вариантов пуска вариант первый более предпочтителен, благодаря обеспечению плавного разгона без резких колебаний мощности.
Согласно рассмотренным способам обеспечивается повышение надежности пуска двигателей за счет исключения их работы в области резонансных частот скольжения.
Кроме того, повышается производительность технологической линии за счет сокращения времени, когда нормальная работа
0
невозможна, снижения энергетических затрат на запуск, эксплуатацию.
Формула изобретения
1.Способ пуска группы синхронных гис- терезисных электродвигателей, при котором посредством статического преобразователя частоты на электродвигатели подают переменное напряжение и разгоняют роторы электродвигателей до синхронной частоты вращения, отличающийся тем, что, с целью повышения надежности пуска исключения резонансных режимов в области низких частот скольжения, в процессе разгона контролируют частоты скольжения каждого электродвигателя, определяют среднее значение частоты скольжения и в момент ее равенства предварительно определенной резонансной частоте скольжения в системе статический преобразователь частоты - электродвигатели изменяют частоту переменного напряжения на величину указанной резо0 нансной частоты скольжения.
2.Способ по п. 1, отличающийся тем, что изменение частоты переменного напряжения осуществляют в сторону уменьшения, после чего продолжают разгон роторов электродвигателей до синхронной частоты
5
вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Гистерезисный электропривод технологической линии (его варианты) | 1984 |
|
SU1264290A1 |
| Частотнорегулируемый электропривод | 1978 |
|
SU767927A1 |
| Способ управления гистерезисным электродвигателем | 1975 |
|
SU657557A1 |
| СПОСОБ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2498491C2 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| Способ управления гистерезисным электродвигателем | 1988 |
|
SU1543528A1 |
| Устройство для управления гистерезисным электродвигателем | 1984 |
|
SU1246318A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА | 2007 |
|
RU2360353C1 |
Изобретение относится к электротехнике и может быть использовано для привода технологических линий. Целью изобретения является повышение надежности пуска и синхронизации путем исключения резонансных режимов в области низких частот скольжени я. В данном способе пуска, синхронизации и ресинхронизации гистере- зисного электродвигателя или группы гисте- резисных электродвигателей подключают гис- терезисные двигатели к статическому источнику питания и осуществляют разгон. Предварительно для конкретной системы статический источник питания - группа электродвигателей определяют резонансную частоту скольжения электродвигателей, при которой наступают резонансные параметрические колебания поля в асинхронном режиме, при разгоне контролируют частоту скольжения двигателя и при достижении резонансной частоты скольжения снижают частоту питания на заданную величину, а затем осуществляют плавный частотный разгон до заданной номинальной частоты питания. 1 з.п. ф-лы, 2 ил. Q (Q (Л
(Pi/.f
///
Ц и.2.
-///
т- /
/7
| УСТРОЙСТВО для ЧАСТОТНОГО УПРАВЛЕНИЯ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 0 |
|
SU365788A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Делекторский Б | |||
| А., Тарасов В | |||
| Н | |||
| Управляемый гистерезисный привод | |||
| М.: Энергоатомиздат, 1983, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU102A1 |
