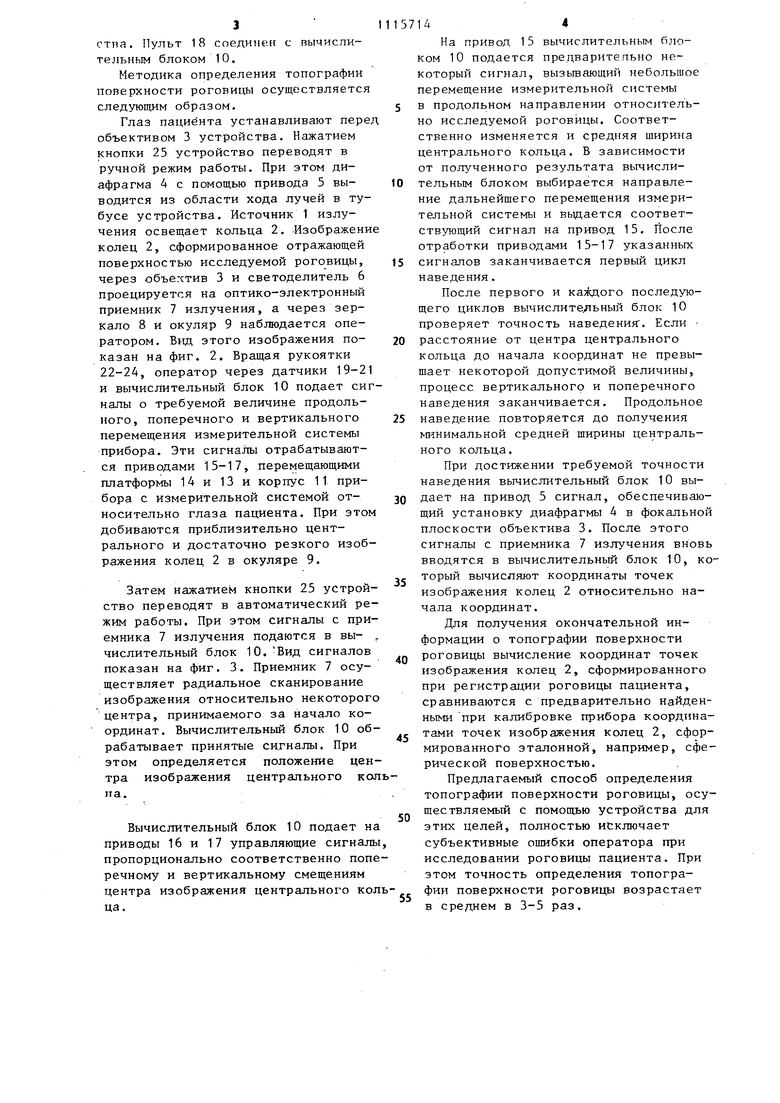
Изобретение относится к медицинской .технике, а именно к способам определения топографии поверхности роговицы. Изве.стен способ определения топографии поверхности роговицы, пре дусматривающий установку измерительной марки на фиксированное расстояние относительно исследуемой роговицы, фоторегистрацию и из мерение формируемого отражающей по верхргостью исследуемой роговицы изображения измерительной марки и аналитический расчет координат точек поверхности роговицы 1. Недостатком этого способа являют ся невысокие точность и оперативность получения информации о форме и размерах поверхности роговицы, обусловленные возможными погрешностями установки измерительной марки на фиксированное расстояние относительно поверхности роговицы, наприм при аномалиях зрения оператора, а также длительностьюпроцесса обраб ки фотопленки. Наиболее близким к предлагаемом по технической сущности и достигаемому результату является способ о ределения топографии поверхности роговицы, предусматривающий устано ку измерительной марки на фиксированное расстояние относительно исследуемой роговицы, регистрацию фо мируемого отражающей поверхностью роговицы изображения измерительной марки с помощью приемника излучения, измерение координат точек это изображения и аналитический расчет координат точек поверхности рогови цы. В этом способе установка измерительной .марки относительно поверхности роговицы производится оператором при визуальной оценке изображения измерительной марки. Регистрация и измерение изображени измерительной марки осуществляется оптико-электронным приемником излучателя 2. Однако указанный способ не обес печивает стабильной высокой точнос ти определения топографии поверхности рого;вицы ввиду использования при установке измерительной марки относительно роговицы визуальной оценки ее изображения. U2 Цель изобретения - пппышение точности определения топогр.кЫти конерхности роговицы. Поставленная цель достигается тем, что согласно способу определения топографии поверхности роговицы, предусматривающему установку измерительной марки на фиксированное расстояние относительно исследуемой роговицы, регистрацию формируемого отражающей поверхностью роговицы изображения измерительной марки с помоп{ью приемника излучения, измерение координат точек изображения и аналитичесий расчет координат точек поверхности роговицы, измеряют ширину линий изображения измерительной марки и определяют координаты центра ее изображения, сравниг.ают последние с координатами точки пересечения оптргческой оси с плоскостью приемника излучения,-а установку измерительной марки относительно исследуемой роговицы осуществляют с учетом ширины линий изображения измерительной марки и результата сравнения координат. На фиг. 1 показано устройство для осуществления способа, виц сбоку; на фиг. 2 - вид регистрируемого изображения; на фиг. 3 - диаграмма сигнала на выходе оптико-электронного приемника. Устройство для осуществления способа определения топографии поверхности роговицы содержит измерительную систему, состоящую из источника 1 (фиг. 1) излучения, измерительной марки, выполненной в виде системы концентрических колец 2, объектива 3, диафрагм 4 с приводом, 5, светоделителя 6, оптико-электронного -приемника 7 излучения, например измерительной телекамеры, зеркала 8, окуляра 9, вычислительного блока 10. Измерительная система помещена в корпусе 11, установленном на платформах 12-14, имеющем приводь 15-17, например в виде шаговьгх двигателей. Управление работой устройства осуществляется с помощью пульта 18, в котором установлены датчики 19-21, поворот которых осуществляется с помощью рукояток 2224. На пульте 18 имеется кнопка 25 переключения режима работы устрой3стпа. Пульт 18 соеди)1еЕ1 с вычислительным блоком 10. Методика определения топографии поверхности роговицы осуществляется следующим образом, Глаз пациента устанавливают пере объективом 3 устройства. Нажатием кнопки 25 устройство переводят в ручной режим работы. При этом диафрагма 4 с помощью привода 5 выводится из области хода лучей в тубусе устройства. Источник 1 излучения освещает кольца 2. Изображени колец 2, сформированное отражающей поверхностью исследуемой роговицы, через объехтив 3 и светоделитель 6 проецируется на оптико-электронный приемник 7 излучения, а через зеркало 8 и окуляр 9 наблюдается оператором. В1Щ этого изображения показан на фиг. 2. Вращая рукоятки 22-24, оператор через датчики 19-21 и вычислительный блок 10 подает сиг налы о требуемой величине продольного, поперечного и вертикального перемещения измерительной системы прибора. Эти сигналы отрабатываются приводами 15-17, перемещающими платформы 14 и 13 и корпус 11 прибора с измерительной системой относительно глаза пациента. При этом добиваются приблизительно центрального и достаточно резкого изображения колец 2 в окуляре 9. Затем нажатием кнопки 25 устрой ство переводят в автоматический ре жим работы. При этом сигналы с при емника 7 излучения подаются в вычислительный блок 10.Вид сигналов показан на фиг. 3. Приемник 7 осуществляет радиальное сканирование изображения относительно некоторог центра, принимаемого за начало координат. Вычислительный блок 10 об рабатывает принятые сигналы. При этом определяется положение цен тра изображения центрального ко иа. Вычислительный блок 10 подает н приводы 16 и 17 управляющие сигналы пропорционально соответственно поп речному и вертикальному смещениям центра изображения центрального ко ца. 144 На привод 15 вычислительным блоком 10 подается предварительно некоторый сигнал, вызьтающий небольшое перемещение измерительной системы в продольном направлении относительно исследуемой роговицы. Соответственно изменяется и средняя ширина центрального кольца, В зависимости от полученного результата вычислительным блоком выбирается направление дальнейшего перемещения измерительной системы и вьщается соответствующий сигнал на привод 15. После отработки приводами 15-17 указанных сигналов заканчивается первый цикл наведения. После первого и какого последующего циклов вычислительный блок Ю проверяет точность наведения. Если расстояние от центра центрального кольца до начала координат не превышает некоторой допустимой величины, процесс вертикального и поперечного наведения заканчивается. Продольное наведение повторяется до получения инимальной средней ширины центрального кольца. При достижении требуемой точности наведения вычислительный блок 10 выдает на привод 5 сигнал, обеспечивающий установку диафрагмы 4 в фокальной плоскости объектива 3. После этого сигналы с приемника 7 излучения вновь вводятся в вычислительный блок 10, который вычисляют координаты точек изображения колец 2 относительно начала координат. Для получения окончательной информации о топографии поверхности роговицы вычисление координат точек изображения колец 2, сформированного при регистрации роговицы пациента, сравниваются с предварительно найденными при калибровке прибора координатами точек изображения колец 2, сформированного эталонной, например, сферической поверхностью. Предлагаемый способ определения топографии поверхности роговицы, осуществляемый с помощью устройства для этих целей, полностью исключает субъективные ошибки оператора ттри исследовании роговицы пациента. При этом точность определения топографии поверхности роговицы возрастает в среднем в 3-5 раз.
л:
/
фиг. 2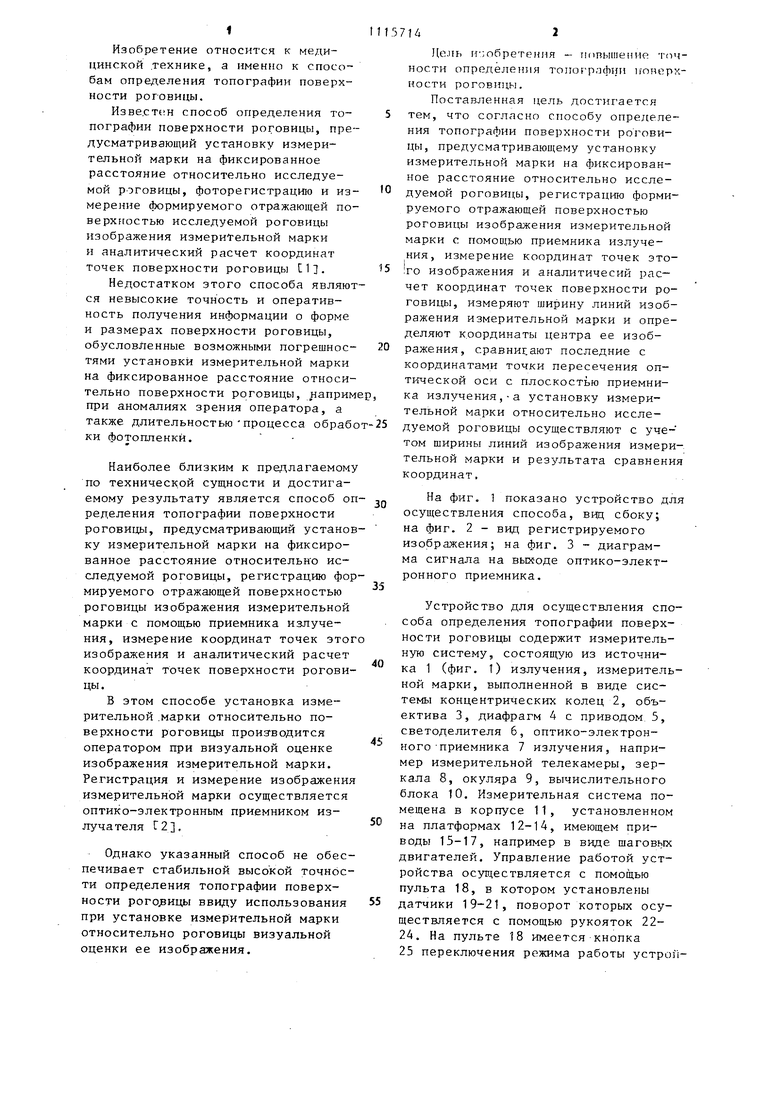
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения топографии поверхности роговицы | 1980 |
|
SU1119652A1 |
| Фотокератометр | 1980 |
|
SU1115716A2 |
| Кератометр | 1979 |
|
SU1101772A2 |
| Кератометр | 1986 |
|
SU1397021A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2010 |
|
RU2452920C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Кератометр | 1986 |
|
SU1762894A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| КЕРАТОМЕТР | 2000 |
|
RU2166904C1 |
СПОСОБ ОПРЕДЕЛЕНР1Я ТОПОГ ФИИ ПОВЕРХНОСТИ РОГОВИЦЫ, предусм ривающий установку измерительной марки на фиксированное расстояние относительно исследуемой роговицы регистрацию формируемого отражающей поверхностью роговицы изображения измерительной марки с помощью приемника излучения, измерение, координат точек этого изображения и аналитический расчет координат точек поверхности роговицы, отличающийся тем, что, с целью повышения точности, измеряют ширину линий изображения измерительной марки и определяют координаты центра ее изображения, сравнивают последние с координатами точки пересечения оптической оси с плоскостью приемника излучения, а установку измерительной марки относительно исследуемой роговицы осуществляют с учетом ширины линий изображения измерительной марки и результата сравнения координат.
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| кл | |||
| Деревобетонный каток | 1916 |
|
SU351A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
