Изобретение относится к области геодезического приборостроения и может быть использовано при установке измерительного прибора в рабочее положение, а именно, при центрировании прибора, т.е. при совмещении вертикальной оси вращения прибора с фиксированной на местности точкой, например, с вершиной измеряемого горизонтального угла. Целевое назначение оптико-электронного центрира - исключение влияния погрешности центрирования (децентрировки) измерительного прибора на результаты измеряемых либо задаваемых прибором величин, определяемых его назначением. Преимущественное использование изобретения - в электронных геодезических приборах, в частности, в электронных тахеометрах, светодальномерах, в лазерных приборах, задающих горизонтальные направления, в приборах типа «зенит-надир», в лазерных сканирующих системах, GPS-системах и др., для центрирования отражателей электронных геодезических приборов, визирных марок, целей, сигналов.
Известен способ центрирования геодезического прибора с помощью оптического центрира, состоящего из зрительной трубы, включающей объектив, окуляр, сетку нитей, призму, изменяющую направление оптической оси зрительной трубы, при этом указанная оптическая ось совмещена с вертикальной осью вращения измерительного прибора, а коллимационная плоскость зрительной трубы совмещена с коллимационной плоскостью измерительного прибора либо образует с ней известный угол (см., например, Захаров А.И. Геодезические приборы: Справочник. - М.: Недра, 1989, с.46, рис.26 и 27).
Недостатками указанного оптического центрира являются недостатки в способе центрирования, осуществляемого с помощью данного устройства, заключающиеся в том, что первоначально штатив с находящимся на нем измерительным прибором устанавливают так, чтобы одна из ножек штатива оказалась на некотором удалении от зафиксированной на местности точки, в которой производится центрирование, а за две другие ножки штатив перемещают, добиваясь расположения вертикальной оси вращения прибора вблизи точки центрирования и наблюдая за горизонтальностью положения головки штатива. После выполнения указанной предварительной установки штатива его ножки укрепляют, продолжая выполнение центрирования и горизонтирования методом последовательных приближений, например, вдавливанием ножек штатива в землю, вторичным их перемещением и т.д. После уточнения центрирования и горизонтирования, ослабив становой винт, измерительный прибор перемещают на головке штатива до совмещения центра сетки оптического центрира с точкой, в которой выполняют центрирование, продолжая наблюдение за выполнением горизонтирования прибора (см., например, Федоров В.И., Титов А.И., Холдобаев В.А. Практикум по инженерной геодезии и аэрогеодезии: Учебное пособие для вузов. - М.: Недра, 1987, с.56, §21).
Таким образом, недостатком использования указанного оптического центрира являются большие затраты времени при вынужденном центрировании и горизонтировании методом последовательных приближений, т.к. одним и тем же приемом центрирование и горизонтирование не могут быть выполнены, а каждое приведение вертикальной оси в отвесное положение (горизонтирование) приводит к нарушению центрирования, т.е. смещению вертикальной оси вращения прибора с точки, в которой выполняют центрирование. И наоборот, совмещение вертикальной оси прибора с указанной точкой местности, приводит к нарушению горизонтирования.
К другим недостаткам указанного оптического центрира можно отнести и то, что наблюдатель должен постоянно смотреть за результатом выполнения центрирования, наблюдая этот процесс в окуляр зрительной трубы центрира. Как известно, положение наблюдателя при таких действиях является сравнительно неудобным: совмещаются действия по наблюдению в зрительную трубу центрира и действия по перемещению (манипуляциям) ножками штатива. Кроме того, при использовании оптического центрира исключается автоматизация процесса центрирования, а также остается неизвестной остаточная погрешность центрирования.
Известно устройство для центрирования в фиксированной точке местности измерительного прибора, выбранное в качестве прототипа, содержащее оптическую систему, включающую объектив, оптическая ось которой совмещена с вертикальной осью вращения измерительного прибора, электронную систему измерения по установленному алгоритму линейного и углового элементов центрирования, являющихся соответственно расстоянием в горизонтальной плоскости между фиксированной на местности точкой, в которой выполняется центрирование, и проекцией вертикальной оси вращения измерительного прибора и углом между коллимационной плоскостью измерительного прибора и направлением указанного линейного элемента, включающую, в частности, датчик измерения линейного и углового элементов центрирования (см. патент №2383862, опубликован 10.03.2010 г., Бюл. №7).
Использование указанного известного устройства предусматривает аналитическое центрирование измерительного прибора с учетом измеренных величин и величин линейного и углового элементов центрирования, используя которые определяют поправки в измеренные прибором величины. При этом механическое центрирование заканчивается на стадии предварительного центрирования (грубого, приближенного), при котором изображение точки местности, в которой выполняется центрирование выводится только в поле зрения оптической системы центрира.
Недостатком указанного известного устройства является то, что его конструкция не предусматривает реализацию алгоритма выполнения геодезических работ, связанных с построением на местности проектных точек, что часто приходится выполнять при производстве геодезических разбивочных работ, когда выполняется не измерение, а построение (задание) на местности расстояний, горизонтальных углов и направлений.
К недостаткам указанного известного устройства относится и необходимость механических действий наблюдателя при определении линейного и углового элементов погрешности центрирования, а именно совмещение коллимационной плоскости измерительного прибора (оптического центрира) с направлением линейного элемента, совмещение зафиксированной на местности точки с центральным индексом сетки зрительной трубы центрира. При выполнении указанных действий наблюдатель должен постоянно смотреть в окуляр зрительной трубы центрира, что, в известной степени, является для него неудобным и сравнительно утомительным.
Кроме того, к недостаткам указанного устройства относится и необходимость механического измерения высоты прибора, равной расстоянию от фиксированной на местности точки до центра зрительной трубы измерительного прибора.
Для устранения указанных недостатков предлагается устройство (оптико-электронный центрир), содержащий систему построения изображения с образованным в ней пространством предмета и пространством изображения, датчик линейного и углового элементов центрирования, установленный в пространстве изображения системы построения изображения, электронную систему регистрации и обработки информации. Датчик линейного и углового элементов центрирования в предлагаемом устройстве выполнен в виде матрицы приемников электромагнитного излучения, оси условной системы координат которой ориентированы известным образом относительно геометрических осей и плоскостей измерительного прибора, установленной с возможностью передачи сигнала в электронную систему регистрации и обработки информации. Указанная система регистрации и обработки информации выполнена, в свою очередь, с возможностью обработки информации по установленному алгоритму и совмещенной с электронной системой регистрации и обработки информации измерительного прибора. Система построения изображения предлагаемого устройства снабжена в пространстве предмета излучателем электромагнитного сигнала, содержащим один и более источников излучения.
Другим отличительным признаком предлагаемого устройства является то, что оно содержит три базы, две постоянных и одну переменную. Одна из постоянных баз образована фиксированным расстоянием в пространстве предмета между источниками излучения, а вторая постоянная база образована расстоянием между плоскостью матрицы приемников излучения и центром проекций системы построения изображения. Третья, переменная, база образована размером изображения в плоскости матрицы приемников излучения постоянной базы пространства предмета. При этом постоянная база в пространстве предмета может изменяться на данной станции и фиксироваться ее значением на момент измерений.
Отличительным признаком предлагаемого устройства является то, что при его использовании отпадает необходимость механического измерения высоты прибора, а также и других линейных элементов, определяющих положение по высоте фиксированной на местности точки относительно элементов конструкции центрира.
Принцип действия предлагаемого устройства (оптико-электронного центрира), а также необходимые пояснения алгоритма редуцирования ошибки центрирования (децентрировки), приведены на фиг.1, 2, 3 и 4.
Дальнейшее рассмотрение принципа действия и работа измерительного прибора определяются характером поставленных задач. При производстве на местности измерений, связанных с построением, например, съемочного обоснования, с топографической съемкой, с привязкой точек местности и т.п., работы выполняются в режиме, условно названном «Измерение». При выполнении геодезических разбивочных работ, связанных с построением на местности точек, линий и т.п.по их заданному (проектному) положению, работы выполняются в режиме, условно названном «Построение».
На фиг.1 представлена схема заявленного устройства. Принятые обозначения на фиг.1:
1 - объектив системы построения изображения;
2 - матрица приемников излучения;
3 - 1-й источник излучения;
4 - 2-й источник излучения;
[3-4] - излучатель (условное обозначение);
5 - идентификационное пятно от источника излучения 3 в плоскости матрицы 2 приемников излучения;
6 - идентификационное пятно от источника излучения 4 в плоскости матрицы 2 приемников излучения;
S - центр проекций объектива 1 системы построения изображения;
А - фиксированная на местности точка, в которой выполняется центрирование измерительного прибора (в указанной точке установлен источник излучения 3);
А' - проекция точки А (центра источника излучения 3) на плоскость матрицы 2 приемников излучения;
В - точка местности в поле зрения системы построения изображения, в которой находится источник излучения 4;
В' - проекция точки В (центра источника излучения 4) на плоскость матрицы 2 приемников излучения;
Т - точка стояния прибора (точка, в которой прибор установлен в рабочее положение);
T' - проекция точки Т в плоскости матрицы 2 приемников излучения;
b - постоянная база в пространстве предмета (постоянное либо фиксированное расстояние в излучателе [3-4] между источниками излучения 3 и 4);
b' - переменная база в пространстве изображения (размер изображения базы b в плоскости матрицы 2 приемников излучения);
l - линейный элемент центрирования в пространстве предмета (расстояние от проекции Т вертикальной оси вращения измерительного прибора до фиксированной на местности точки А);
l' - проекция линейного элемента центрирования l в пространстве изображения (расстояние от центра координат системы координат матрицы 2 приемников излучения до изображения точки А);
W - горизонтальная плоскость в пространстве предмета, содержащая точки T, А и В;
W' - плоскость матрицы 2 приемников излучения (горизонтальная плоскость в пространстве изображения, содержащая точки T, А' и B');
xT'y - условная система координат в плоскости матрицы 2 приемников излучения;
xA - координата x центра идентификационного пятна 5 от источника излучения 3 в плоскости матрицы 2 приемников излучения;
yA - координата y центра идентификационного пятна 5 от источника излучения 3 в плоскости матрицы 2 приемников излучения;
xB - координата x центра идентификационного пятна 6 от источника излучения 4 в плоскости матрицы 2 приемников излучения;
yB - координата y центра идентификационного пятна 6 от источника излучения 4 в плоскости матрицы 2 приемников излучения;
ОТ - вертикальная ось вращения измерительного прибора;
О - центр зрительной трубы измерительного прибора;
a=ST' - постоянная база (расстояние от плоскости матрицы 2 приемников излучения до центра проекций S);
с=OS - постоянная прибора (расстояние от центра проекций S до центра О зрительной трубы измерительного прибора;
h - расстояние от центра проекций S до точки T по отвесной линии;
i - высота измерительного прибора.
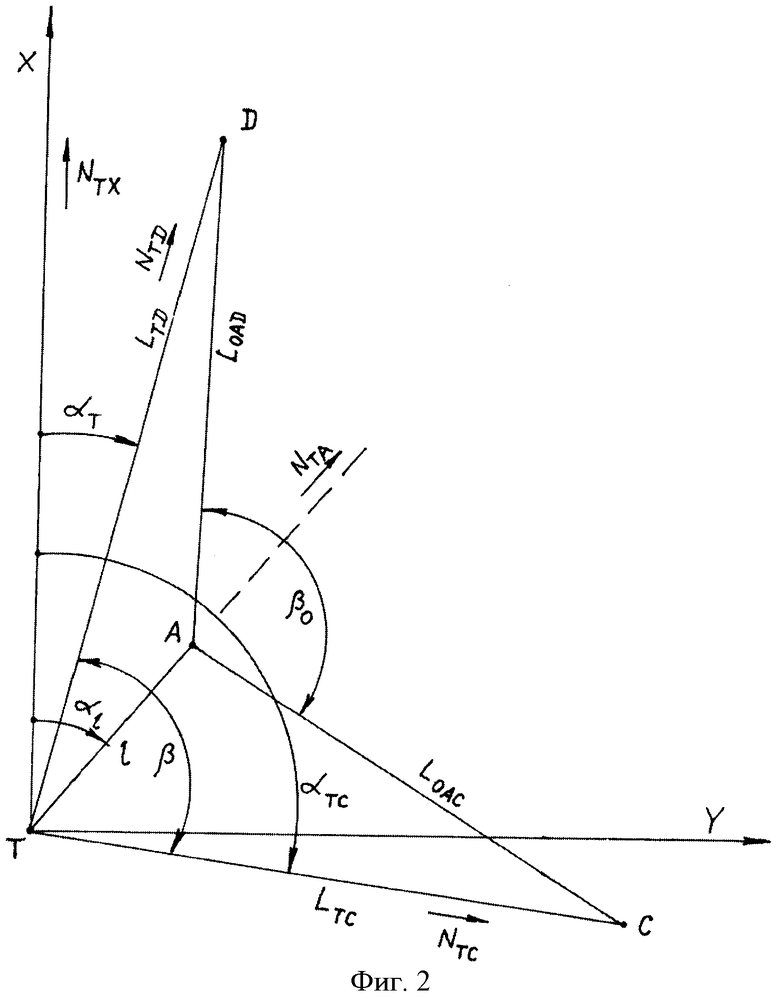
На фиг.2 показана схема для пояснения алгоритма вычисления и введения поправок в измеренные прибором величины с учетом погрешности центрирования (децентрировки) в режиме работы «Измерение». Обозначения, принятые на фиг.2:
A, D и С - фиксированные на местности точки, расположение которых задает величину определяемого горизонтального угла βO и величины определяемых расстояний LOAD и LOAC
Т - точка стояния прибора (см. фиг.1);
βO - определяемый горизонтальный угол;
β - измеренный горизонтальный угол;
NTD и NTC - измеренные горизонтальные направления (отсчеты по горизонтальному кругу измерительного прибора) из точки Т соответственно на точки D и С;
NTA - направление линейного элемента центрирования;
XTY - условная система координат - проекция условной системы координат xT'y матрицы 2 приемников излучения в пространство предмета (см. фиг.1);
NTX - направление (отсчет по горизонтальному кругу измерительного прибора), соответствующее направлению оси ТХ;
l - линейный элемент центрирования (см. фиг.1);
LTD и LTC - измеренные расстояния от точки стояния Т до удаленных точек D и С сторон измеряемого горизонтального угла;
LOAD и LOAC - определяемые расстояния;
αTD и αTC - условные дирекционные углы соответствующих измеренных направлений;
α1 - условный дирекционный угол направления линейного элемента центрирования.
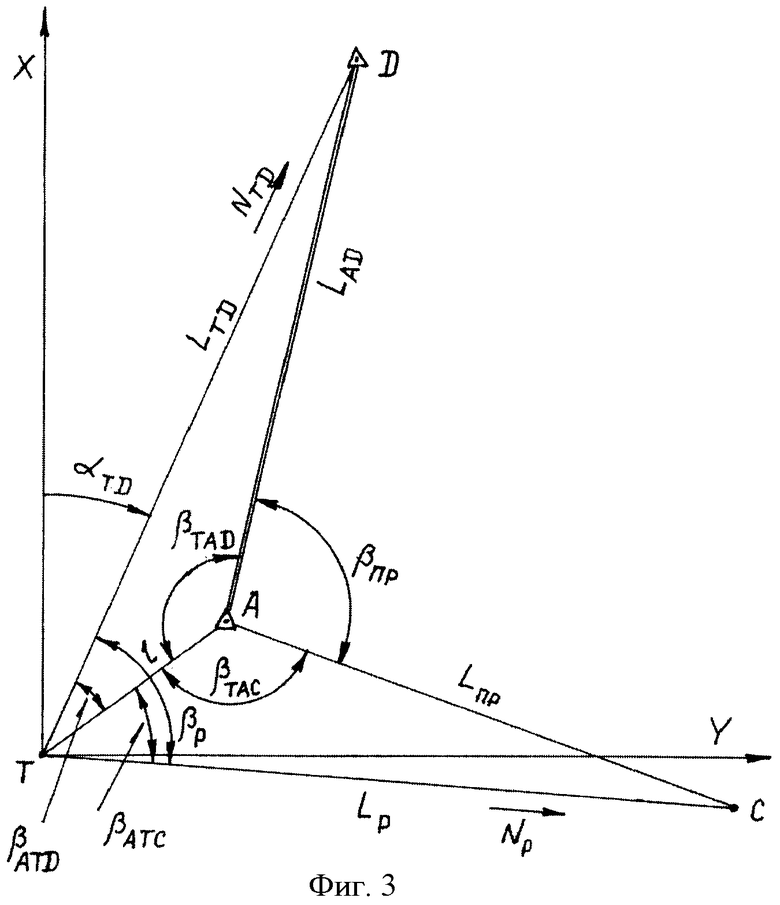
На фиг.3 показана схема для пояснения алгоритма вычисления рабочих разбивочных элементов для построения проектной точки С (режим работы «Построение») с учетом погрешности центрирования (децентрировки). Обозначения, принятые на фиг.3 (с учетом обозначений, приведенных на фиг.1 и 2):
AD - элемент (базис) геодезической разбивочной основы (длина базиса LAD);
С - проектная точка (точка, которая должна быть вынесена на местность);
XTY - условная прямоугольная система координат (см. фиг.1);
βПР - проектный горизонтальный угол в точке А базиса (угловой разбивочный элемент);
βР - рабочий разбивочный горизонтальный угол в точке стояния Т (рабочий угловой разбивочный элемент);
βi - (i→TAD, ТАС, АТС, ATD) - горизонтальные углы в точке стояния T и в точке базиса А;
LПР - проектное расстояние от точки А базиса до проектной точки С (линейный разбивочный элемент);
LР - рабочее разбивочное расстояние (рабочий линейный разбивочный элемент) от точки стояния Т до проектной точки С;
NР - рабочее разбивочное направление с точки стояния Т на проектную точку С (рабочий разбивочный элемент по направлению);
NTD - направление с точки стояния Т на удаленную точку D базиса геодезической разбивочной основы;
LTD - расстояние от точки стояния Т до удаленной точки D базиса геодезической разбивочной основы;
l - линейный элемент центрирования (см. фиг.1);
αTD - условный дирекционный угол направления с точки стояния Т на удаленную точку D базиса геодезической разбивочной основы.
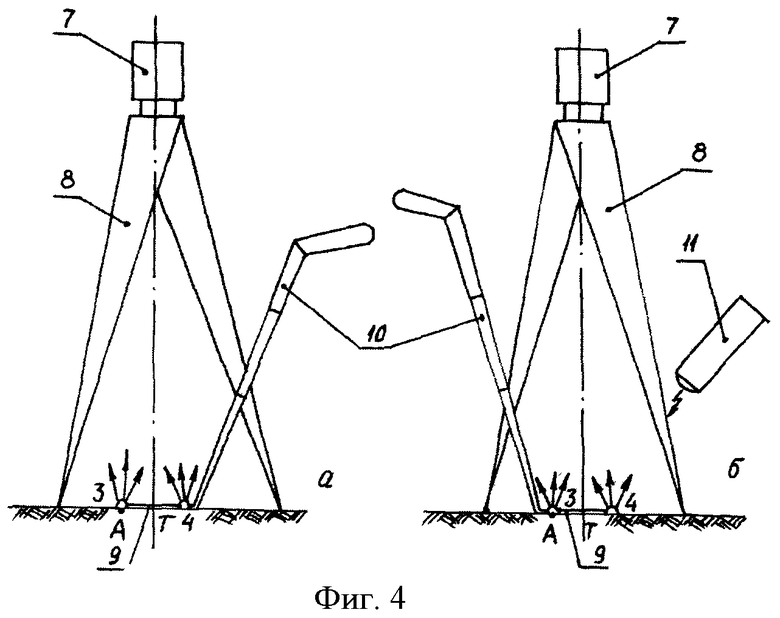
На фиг.4 показана схема размещения излучателя под измерительным прибором. Обозначения, принятые на фиг.2 (с учетом обозначений, указанных на фиг.1, 2 и 3).
7 - измерительный прибор;
8 - штатив;
9 - излучатель [3-4];
10 - штанга;
11 - автономный облучатель.
Обозначение элементов 3, 4, А и Т см. на фиг.1.
Подготовительные работы.
В фиксированной на местности точке А устанавливают измерительный прибор и размещают под ним излучатель [3-4], один из источников излучения которого, например, 3, устанавливают непосредственно в точке А. При этом вертикальная ось вращения измерительного прибора может не совпасть с фиксированной на местности точкой А, и ее проекция окажется в точке Т. При установке измерительного прибора достаточно только ввести изображение точки А в поле зрения системы построения изображения, определяемого размерами матрицы приемников излучения. Указанную установку прибора контролируют по его дисплею. Измерительный прибор горизонтируют, что заключается в приведении вертикальной оси ОТ прибора в отвесное положение. Выполняют предварительное центрирование измерительного прибора, которое заключается в приведении изображения от обоих источников излучения 3 и 4 в поле зрения, определяемое геометрическими параметрами матрицы 2 приемников излучения, что можно также контролировать по дисплею измерительного прибора. При этом источник излучения 3 постоянно находится в точке А, а перемещают источник излучения 4.
Матрица 2 приемников излучения совместно с электронной системой регистрации и обработки информации выделяет область идентификационных пятен 5 и 6 от источников излучения 3 и 4, центры указанных идентификационных пятен, в результате чего определяются условные координаты хA, yA, xB и yB точек А и В постоянной базы b излучателя в условной системе координат xT'y матрицы 2 приемников излучения.
Дальнейшие действия и работа измерительного прибора определяются указанными выше режимами работы «Измерение» и «Построение».
Режим работы «Измерение».
Геометрическая схема аналитического центрирования для режима работы «Измерение» представлена на фиг.2. Далее рассмотрим алгоритм решения задачи аналитического центрирования для указанного режима работы.
В указанном режиме работы на местности необходимо измерить горизонтальный угол βO в вершине А и расстояния LOAD и LOAC.
Для простоты выберем в горизонтальной плоскости условную систему координат xТy (XTY), ось x (X) которой совпадает с направлением на нулевой отсчет горизонтального круга прибора (на нулевой отсчет системы регистрации направлений измерительным прибором), т.е. NTX=0. В общем случае указанный отсчет может быть любым, но известным наблюдателю и зарегистрированным в электронной системе регистрации и обработки информации измерительного прибора.
Предположим, что измерены величины линейного l и углового αl элементов центрирования, при этом угловой элемент центрирования соответствует условному дирекционному углу направления линейного элемента. В принятой условной системе координат все направления, исходящие (измеренные) в точке T, по величине соответствуют условным дирекционным углам:

Далее выполним измерение расстояний LTD и LTC.
В принятой системе координат определим координаты точек A, D и С (для точки Т xT=0 и yT=0):



В формулах (2) для получения линейного элемента центрирования используют величину измеренного изображения l' этого элемента в плоскости матрицы приемников излучения по формуле

а значение условного дирекционного угла направления линейного элемента центрирования - по формуле обратной геодезической задачи

где хА и уА - координаты центра идентификационного пятна 5 в условной системе прямоугольных координат матрицы 2 приемников излучения.
В формулах (1) неизвестной является величина линейного элемента l центрирования. Для определения указанной величины по координатам хА, уА, хВ и уВ в точек А и В постоянной базы b вычисляют величину b' проекции этой базы (переменную базу) в плоскости матрицы 2 приемников излучения по формуле

Из геометрического подобия находим

Далее из решения обратной геодезической задачи вычислим условные дирекционные углы определяемых направлений AD и АС:


где ΔxDA=xD-xA; ΔyDA=yD-yА; ΔxCA=xC-xA; ΔyCA=yC-yА.
Очевидно, что значение определяемого горизонтального угла βO равно разности полученных дирекционных углов:

Найдем определяемые расстояния:


Задача решена.
Алгоритм решения данной задачи, т.е. определения горизонтального угла и длин сторон, образующих горизонтальный угол, при известных значениях b (постоянной базы излучателя), хA, yA, xB, yB (координат центров идентификационных пятен от источников излучения в плоскости матрицы приемников излучения), LTD, LTC, NTD и NTC (значений измеренных в точке стояния Т расстояний и направлений), а также с учетом того, что NTX=0, описывается следующими выражениями (в соответствии с принятыми ранее обозначениями):
Как видно, приведенные выражения являются простыми, состоящими из четырех однотипных членов.
При решении задачи по указанному алгоритму следует иметь в виду условия получения дирекционных углов (через arctg) по приемам их вычисления при решении обратной геодезической задачи в зависимости от знаков числителя и знаменателя (см., например, Чекалин С.И. Основы карторафии, топографии и инженерной геодезии: Учеб. пособие для вузов. - М.: Академический Проект, 2009, с.213-217).
Таким образом, для реализации режима работы «Измерение», после регистрации координат точек постоянной базы в пространстве предмета и автоматического вычисления линейного элемента l центрирования и координат точки А, необходимо выполнить следующее.
Последовательно навести центр сетки нитей зрительной трубы измерительного прибора на удаленные фиксированные на местности точки сторон измеряемого горизонтального угла и (или) измеряемого расстояния (наведение выполняют последовательно на точки D и С - см. фиг.2; в указанных точках установлены отражатели). Результаты измерений (расстояние и направление) регистрируются измерительным прибором и фиксируются в соответствующих блоках электронной системы центрира (измерительного прибора). Далее по установленному алгоритму, определяемому выражениями (12), (13) и (14), электронной системой измерительного прибора автоматически выполняется определение искомых горизонтального угла и расстояний.
Режим работы «Построение».
Геометрическая схема аналитического центрирования для режима работы «Построение» представлена на фиг.3. Далее рассмотрим алгоритм решения задачи аналитического центрирования для указанного режима работы.
На местности необходимо построить положение проектной точки С по разбивочным элементам βПР и LПР относительно точек А и D геодезической разбивочной основы.
В точке А геодезической разбивочной основы устанавливается тахеометр, при этом проекция вертикальной оси вращения прибора оказалась в точке T на расстоянии l от точки А в произвольном от нее направлении.
Как и в режиме работы «Измерение» выбираем условную систему координат xТy (ХТУ), ось T'x (ТХ) которой совпадает с направлением на нулевой отсчет по горизонтальному кругу прибора.
Как видно из схемы фиг.3, на местности необходимо построить в точке Т рабочий разбивочный горизонтальный угол βP от направления TD на проектную точку С и рабочее разбивочное расстояние LP от точки Т до проектной точки С.
Возьмем в точке Т направление (отсчет по горизонтальному кругу) NTD на удаленную точку D базиса геодезической разбивочной основы и расстояние до нее LTD. Измерим также величину линейного элемента / центрирования (см. Подготовительные работы).
Из решения треугольника TDA (значение LAD известно, поскольку точки А и D являются точками геодезической разбивочной основы) получим горизонтальные углы:


Далее вычислим - значение горизонтального угла βTAC:

Угол βПР в формуле (14) известен, поскольку он является предварительно вычисленным угловым разбивочным элементом (проектный разбивочный угол).
В треугольнике ТАС известны стороны l и LПР (предварительно вычисленный линейный разбивочный элемент для построения точки С) и горизонтальный угол βTAC. Следовательно, можно определить его неизвестную сторону LР, являющуюся рабочим линейным разбивочным элементом:

Далее находим по теореме синусов горизонтальный угол βATC:

Таким образом, для построения точки С в ее проектное положение необходимо использовать рабочее проектное расстояние LР и рабочий горизонтальный угол βР в точке Т:

Рабочее разбивочное направление (рабочий разбивочный отсчет по горизонтальному кругу) на точку С в точке Т будет в данном случае равно:

Задача решена.
Алгоритм решения данной задачи, т.е. определения рабочих разбивочных элементов (горизонтального угла, расстояния, направления), при известных значениях b (постоянной базы излучателя), xA, yA, xB, yB (координат центров идентификационных пятен от источников излучения в плоскости матрицы приемников излучения), LAD (базиса геодезической разбивочной основы), βПР и LПР (соответственно: проектного разбивочного горизонтального угла и проектного разбивочного расстояния), LTD, и NTD (значений измеренного в точке стояния расстояния и направления на удаленную точку базиса геодезической разбивочной основы), а также с учетом того, что NTX=0, описывается следующими выражениями (в соответствии с принятыми ранее обозначениями):
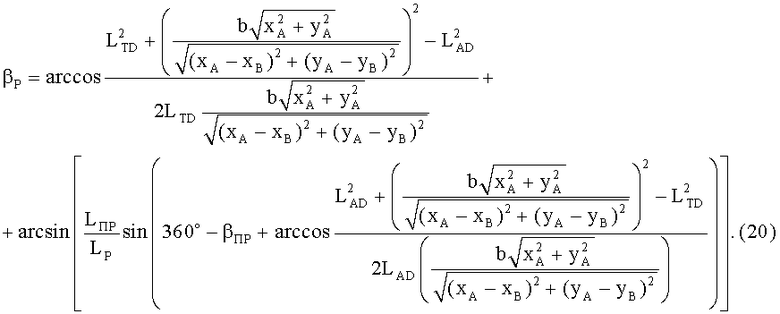
В выражении (20) значение LР подставляется из выражения (19).
Соответственно определение рабочего разбивочного направления из точки стояния Т на точку С выполняется по формуле (18) с учетом измеренного направления с точки Т на точку D и вычисленного по формуле (20) значения рабочего разбивочного горизонтального угла.
Таким образом, после выполнения режима «Подготовительные работы», в который входит и вычисление проектных значений горизонтального угла и расстояния, что является функцией работы измерительного прибора, для реализации режима работы «Построение» на местности необходимо выполнить следующее.
Выполнить наведение центра зрительной трубы измерительного прибора на удаленную точку базиса D геодезической разбивочной основы AD и зарегистрировать для нее полученные направление и расстояние. Результаты измерений регистрируются измерительным прибором и фиксируются в его памяти. Дальнейшая обработка выполняется автоматически по приведенному выше алгоритму, определяемому формулами (19), (20) и (18).
Следует отметить, что приведенные алгоритмы решения указанных задач не являются единственными, в связи с чем и построение разветвленных схем обработки информации может быть несколько иным. Например, для случая NTX≠0 необходимо значения дирекционных углов в принятой условной системе координат вычислять как разности измеренного направления и значения NTX. В режиме работы «Построение» может быть поставлена задача построения, например, только горизонтального угла либо только расстояния. С учетом этого изменится и алгоритм решения такой задачи. В электронной системе измерительного прибора для разных случаев необходимо предусмотреть реализацию всех возможных алгоритмов с учетом функций использования данного прибора. При этом использование других алгоритмов расчета с использованием тех же измеренных величин дают тождественные результаты.
Использование излучателя с постоянной базой b позволяет определять автоматически высоту i измерительного прибора по формуле

где с - расстояние от центра объектива 1 системы построения изображения до центра зрительной трубы измерительного прибора, являющееся для данного прибора постоянной величиной (фиг.1); b' - величина проекции постоянной базы излучателя, определяемая по формуле (7);

где a - постоянная база центрира в пространстве изображений системы построения изображений - расстояние от плоскости матрицы 2 приемников излучения до центра проекций S объектива 1 (см. фиг.1).
С учетом выполненных ранее преобразований получение значения высоты прибора может быть выполнено по следующему алгоритму:

В оптико-электронном центрире может использоваться в излучателе один источник излучения, который последовательно перемещают при выполнении наблюдений на величину постоянной базы. Постоянная база в пространстве предмета может быть выполнена также изменяемой и регистрироваться только на данной станции либо в данное время работы на данной станции. С этой целью источники излучения в излучателе выполнены подвижными друг относительно друга с регистрацией расстояния между ними. Таким образом, понятие «постоянная база в пространстве предмета» определяет ее известное на момент измерений значение, которое регистрируется и вводится в электронную систему измерительного прибора.
Для установки излучателя 9 в фиксированной на местности точке А под измерительным прибором 7, установленном на штативе 8, возможно использование штанги 10, например, телескопического типа (фиг.4а), оборудованной системой питания активных источников излучения и формирования электромагнитного сигнала. В случае использования пассивных источников излучения, выполненных, например, в виде отражателей электромагнитного сигнала, доставка излучателя в фиксированную на местности точку может быть выполнена с помощью штанги 10, а освещение источников излучения при этом может выполняться автономно от переносного облучателя 11, работающего в заданном режиме (фиг.4б).
Для эффективной работы в излучателе используются источники излучения диффузного типа.
При использовании в излучателе двух и более источников излучения, работающих одновременно, излучатель снабжен системой идентификации каждого из источников излучения.
Использование способа центрирования с приведенным алгоритмом аналитического редуцирования измеряемых величин с учетом элементов центрирования позволит значительно уменьшить трудоемкость при установке измерительного прибора, поскольку величины линейных элементов центрирования не устраняют путем механических действий с прибором, а также аналогичных действий с механизмами центрира, а определяют их величины и соответствующее угловое положение автоматически непосредственно в процессе измерений относительно выбранной условной системы координат и исключают влияние элементов центрирования (децентрировки) введением соответствующих поправок во все измеренные и задаваемые измерительным прибором величины, определяемые его назначением. Точность центрирования методом аналитического редуцирования определяется не величинами элементов центрирования, а только погрешностями определения этих элементов. Например, величина линейного элемента центрирования (децентрировки) может достигать 30-40 и более мм при требуемой точности механического центрирования, равной 0,2-0,5 мм.
Таким образом, предлагаемое устройство (оптико-электронный центрир) позволяет полностью автоматизировать процесс аналитического центрирования измерительного прибора с вычислением значений определяемых величин (направлений, горизонтальных углов, расстояний), а также задаваемых величин, точность определения и задания которых практически обуславливается только точностью измерения линейного и углового элементов центрирования. Кроме того, предлагаемое устройство обеспечивает автоматическое измерение и регистрацию высоты измерительного прибора.
Использование предлагаемого устройства позволяет с высокой степенью точности производить необходимые точные и высокоточные геодезические измерения и построения в стесненных условиях, при коротких сторонах измеряемых углов в условиях плотной застройки, на стройплощадках, при создании геодезических сетей высоких классов точности, в том числе - локальных геодезических сетей высокой точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВНЕЦЕНТРЕННЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2552393C2 |
| СПОСОБ УСТАНОВКИ ИЗМЕРИТЕЛЬНОГО ПРИБОРА В РАБОЧЕЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2428656C1 |
| ПРИБОР ВЕРТИКАЛЬНОГО ПРОЕКТИРОВАНИЯ | 2011 |
|
RU2481556C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423664C2 |
| ПРИБОР ВЕРТИКАЛЬНОГО ПРОЕКТИРОВАНИЯ | 2015 |
|
RU2589239C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2009 |
|
RU2430332C2 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| СПОСОБ ПРОИЗВОДСТВА РАЗБИВОЧНЫХ РАБОТ | 2000 |
|
RU2176778C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
Изобретение относится к области геодезического приборостроения и может быть использовано при установке измерительного прибора в рабочее положение. Техническим результатом является проведение с высокой степенью точности необходимых точных и высокоточных геодезических измерений и построений в стесненных условиях, при коротких сторонах измеряемых углов в условиях плотной застройки. Оптико-электронный центрир содержит систему построения изображения, включающую излучатель электромагнитного сигнала, датчик линейного и углового элементов центрирования, электронную систему регистрации и обработки информации. Оптико-электронный центрир также содержит три базы, две постоянных и одну переменную. Одна постоянная база образована фиксированным на момент измерений расстоянием в пространстве предмета между источниками излучения. Вторая постоянная база образована расстоянием между плоскостью матрицы приемников излучения и центром проекций системы построения изображения. Переменная база образована размером изображения в плоскости матрицы приемников излучения постоянной базы пространства предмета. Источник и/или источники излучения выполнен(ы) подвижным(и) с возможностью регистрации перемещения источника либо перемещения источников друг относительно друга. 2 з.п. ф-лы, 4 ил.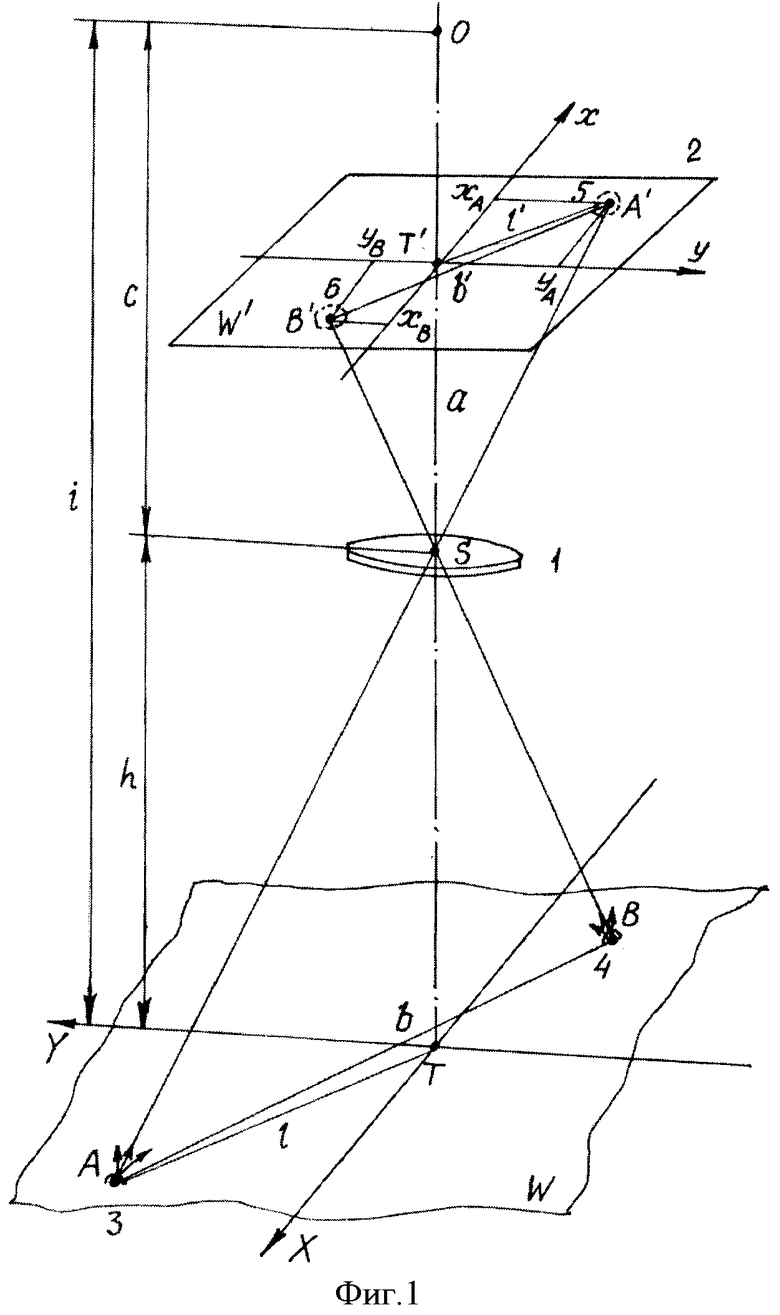
1. Оптико-электронный центрир, предназначенный для центрирования измерительного прибора, например геодезического, в фиксированной на местности точке, содержащий систему построения изображения с образованным в ней пространством предмета и пространством изображения, включающую излучатель электромагнитного сигнала, содержащий один или несколько источников излучения, установленный в пространстве предмета, датчик линейного и углового элементов центрирования, выполненный в виде матрицы приемников излучения, установленной в пространстве изображения системы построения изображения и имеющей оси условной системы координат, ориентированные известным образом относительно геометрических осей и плоскостей измерительного прибора, электронную систему регистрации и обработки информации, установленную с возможностью приема сигналов от матрицы приемников излучения, отличающийся тем, что он содержит три базы, две постоянных и одну переменную, при этом одна постоянная база образована фиксированным на момент измерений расстоянием в пространстве предмета между источниками излучения, вторая постоянная база образована расстоянием между плоскостью матрицы приемников излучения и центром проекций системы построения изображения, а переменная база образована размером изображения в плоскости матрицы приемников излучения постоянной базы пространства предмета, при этом источник и/или источники излучения выполнен(ы) подвижным(и) с возможностью регистрации перемещения источника либо перемещения источников относительно друг друга.
2. Оптико-электронный центрир по п.1, отличающийся тем, что излучатель снабжен источниками излучения диффузионного типа.
3. Оптико-электронный центрир по п.1, отличающийся тем, что излучатель снабжен системой идентификации каждого из источников излучения.
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
| Приспособление для сверления отверстий во фланцах без разметки | 1950 |
|
SU88794A1 |
| RU 2060461 С1, 20.05.1996 | |||
| ОПТИЧЕСКАЯ СИСТЕМА ЭЛЕКТРОННО-ОПТИЧЕСКОГО ТАХЕОМЕТРА | 1994 |
|
RU2097694C1 |
| СПОСОБ ЭСТЕТИЧЕСКОЙ ОБЛИЦОВКИ МЕТАЛЛИЧЕСКИХ КЛАММЕРОВ СЪЕМНЫХ ЗУБНЫХ ПРОТЕЗОВ | 2009 |
|
RU2421181C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2299402C1 |
| Способ изготовления многослойных деталей из полиимидофторопластовых пленок | 1988 |
|
SU1600191A1 |

