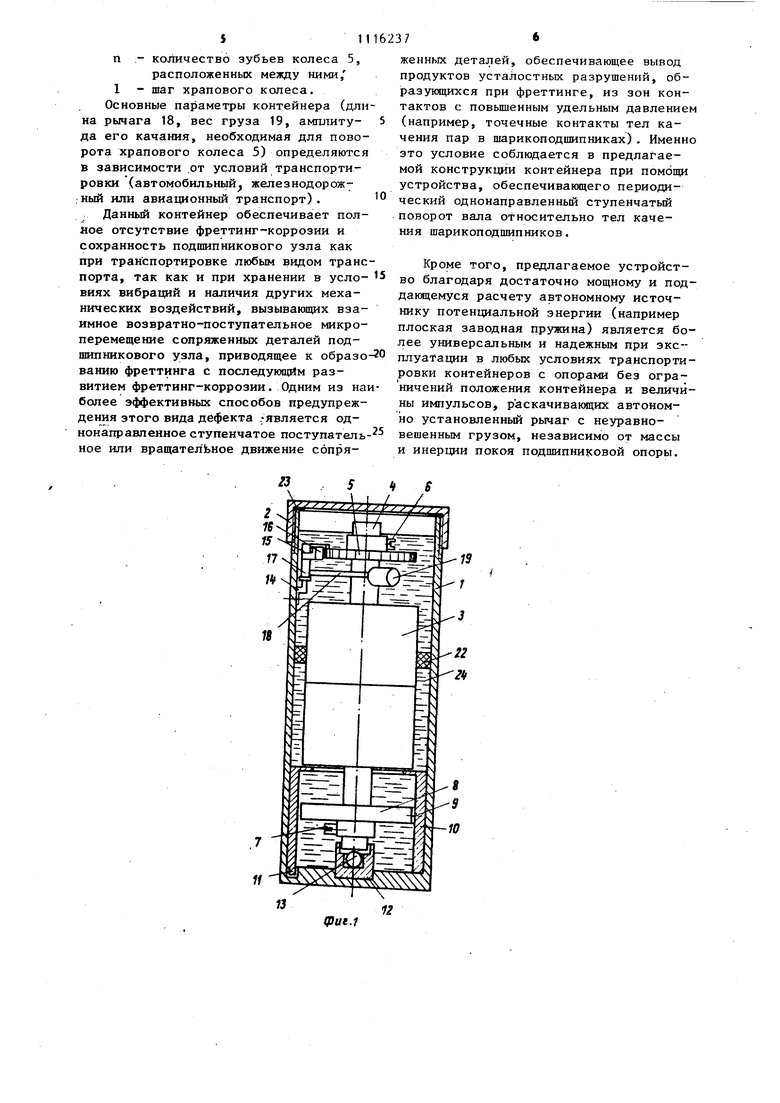
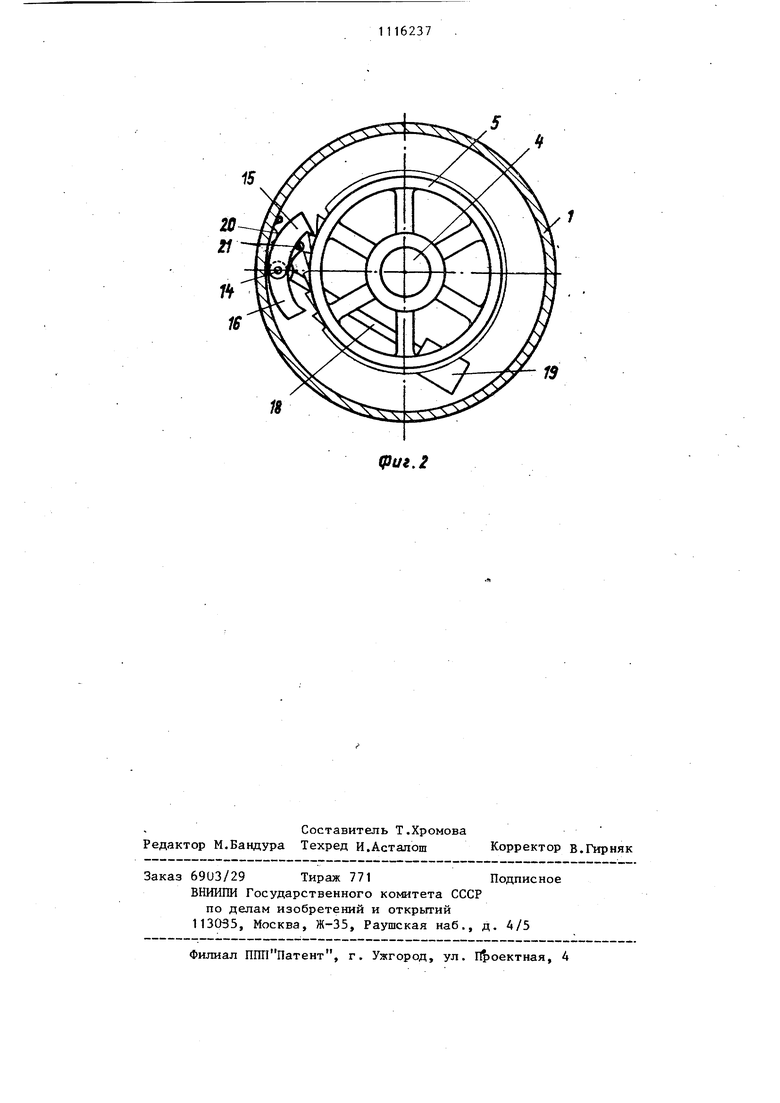
Изобретение относится к упаковке, а именно к конструкциям контейнеров для транспортировки и хранения подшипниковых опор, например опор турбо холодильника и может быть использова но при транспортировке и хранении др гих узлов машин и агрегатов, содержа щих сопряженные взаимно перемещающие ся детали, смонтированные на общей оси. Известен контейнер для транспорти ровки совмещенных подшипников качения, содержащий корпус, смонтированные в нем демпфирующие элементы в . виду пружин, на которых расположен в для опоры, радиальный штифт, с которым взаимодействуют направляющие элементы,, выполненные в виде Г-образных упругих консольно закрепленных в радиальном направлении пластин каждая из которых имеет палец с клиновой головкой, ребро которой смещено в сторону, противоположную консольному участку 11. Однако данное устройство работоспособно при значительных амплитудах колебаний контейнера и при условии, что угол прогиба пружинящей пластины не меньше 6-8°, а также при расположении штифта, взаимодействующего с пластиной в достаточном удалении от места ее закрепления на корпусе контейнера. При этом, поскольку подшипниковая опора в противопоставленном контейнере подвешена на цилиндрических пружинах, размещенных во втулках в которые входят оба конца вала опоры, эффективными могут быть только соосные с опорой колебания контейнера, которьй должен быть установлен верти кально. А при отклонении контейнера от вертикали эффективность устройства снижается из-за повьщ енного трени и возможного заклинивания концов вала во втулках контейнера. Наиболее близким к изобретению по технической сущности и достигаемому результату является контейнер для транспортировки и хранения подшипниковой опоры, содержаш 1Й корпус,установленный в нем вал.для подшипниковой опоры и механизм для создания по ворота вала, включаю1ций рычаг с грузом, смонтированное на валу храповое колесо и собачку С2П. Известное устройство не обеспечивает однонаправленного, неколебательного, взаимного перемещения тел качения, необходимого для защиты от транспортной фреттинг-коррозии, имеет низкую надежность в работе при малых амплитудах колебаний. Целью изобретения является повышение надежности работы при малых амплитудах колебаний и горизонтальном положении контейнера за счет обеспечения принудительного апериодического однонаправленного ступенчатого поворота вала. Указанная цель достигается тем, что в контейнере для транспортировки и хранения подшипниковой опоры турбохолодильника, содержащем корпус, установленный в нем вал для подшипниковой опоры и механизм для создания поворота вала, включающий рычаг с грузом, смонтированное на валу храповое колесо и собачку, механизм для создания поворота вала снабжен смонтированной на стенке корпуса осью, на которой размещены рычаг с грузом и собачка, установленной на этой оси подпружиненной дополнительной собач- i кой, противоположно направленной основной, и плоской пружиной, закрепленной одним концом на валу, другим на стенке корпуса, основная собачка выполнена со штифтом, взаимодействуюmjiM с дополнительной собачкой, а расстояние L между рабочими концами собачек равно L 0,5е(2п + 1), где п - количество зубьев храпового колеса; 6 - шаг храпового колеса. I На фиг. 1 представлен предлагаемый контейнер, продольный разрез, на фиг, 2 - то же, поперечный разрез . Контейнер содержит корпус 1 с крышкой 2 (фиг, 1), в котором размещена шарикоподшипниковая опора 3. На верхнем конце вала 4 опоры 3 установлено храповое колесо 5, закрепленное стопорным винтом 6, а на нижнем конце при помощи стопорного винта 7 закреплен внутренний конец плоской спиральной пружины 8, второй конец 9 которой закрплен на боковой стенке втулки 10, неподвижно сопряженной с корпусом 1 контейнера посредством зуба 11. Нижний конец вала 4 входит в чашку 12, опираясь на упорный шарик 13. На боковой стенке 3 kopnyca 1 контейнера закреплена вертикальная ось 14, на которой уста новлены попеременно сопрягающиеся с храповым колесом 5 разнонаправленные собачки 15 и 16 (фиг. 2). На втулке 17 собачки 16 закреплен рычаг 18 с грузом 19. Собачка 15 подпружинена пластинчатой пружиной 20, закрепленной на стенке корпуса 1 контейне ра. На собачке 16 установлен штифт 21, воздействующий на собачку 15 при отклонении груза 19 на заданную величину. Между корпусом 1 контейнера и опорой 3 размещено кольцо 22 из упругого материала, например маслостойкой резины. Между корпусом 1 кон тейнера и крьппкой 2 находится уплотнительная, например резиновая тайба 23. Контейнер заполнен консервиру щей средой, например рабочим 24. Устройство работает следующим образом. После завода пружины 8, которьА осуществляется вращением вала 4, эле менты устройства занимают положение показанное на фиг. 2: подпружиненная собачка 15 находится в зацеплении с зубом храпового колеса 5, а рычаг 18 с грузом 19 и собачкой 16 имеет воз можность свободно раскачиваться. Под воздействием транспортных ви раций, сотрясений и толчков груз 19 совершает нарастаюпще колебательные движения, амплитуда которых в некоторых резонансных состояниях системы достигает величины, достаточной для вывода подпружиненной собачки 15 при ПОМ01ЦИ штифта 21 из зацепления с зубом храпового колеса 5. В этот момент рабочий конец собачки 1 занимает положение между соседними зубьями колеса 5, пружина 8 поворачивает его вместе с валом 4 на 1/2 шага и очередной зуб колеса 5 входит в зацепление с собачкой 16. При отклонении (под воздействием пружины 20) качающегося рычага 18 в другую сторону штифт 21 отходит от собачки 15, которая под. действием пружины 20 з анимает положение между очередной парой зубьев храпового колеса 5. При этом собачка 16 выходит и зацепления с зубом колеса 5, которо поворачивается еще на полшага и оче редной зуб его входит в зацепление с подпружиненной собачкой 15. Освободившийся от действия пружины 20 р 374 чаг 1В с грузом 19 снова сврбодно раскачивается, набирая амплитуду размаха до требуемой величины, и описанный механизм поворота колеЬа 5 с валом 4 повторяется. Отсутствие жесткой связи между собачками 15 и 16 обеспечивает возможность свободного раскачивания рычага 18 с грузом 19 с постепенным увеличением амплитуды качания до необходимой величины при любых, в том числе произвольно изменяющихся, режимах вибрации и сотрясений контейнера с опорой 3. Вращение наружных колец шарикоподшипни ковой опоры 3 предотвращается упругим кольцом 22. Для обеспечения описанного порядка работы устройства, ступенчато поворачивающего вал на полшага; храповог го колеса 5, и предотвращения одно- , моментного поворота храпового коле- i са более чем на полшага необходимо, чтобы между зубьями храпового колеса в любой момент времени находился рабочий конец .одной из собачек:. Вследствие неупорядоченности и нерегулярности транспортных сотрясений и вибраций резонансные состояния, вызывающие поворот вала 4, носят апериодический характер, возникают случайно и достаточно редко, что обеспечивает наиболее экономное расходование энергии заведенной пружины В, и соответственно, увеличение продол- жительности работы рассматриваемого механизма для поворота вала. Достижению этой цели способствует также минимизация угла единовременного поворота храповика 5 с валом 4. Оптимольным является поворот на половину шага зубчатки храповика . Это обеспечивается тем, что расстояние между рабочими концами собачек выполнено не кратным числу расположенных между ними зубьев колеса 5. В этом случае в момент выхода из зацепления одной из собачек другая находится от соседних с ней зубьев храповика на расстоянии, исключающем ее контакт, с каким-либо зубом. Оптимальным расстоянием является величина, кратная половине шага храповика, что выражено формулой L 0,5(2п + 1), где L - расстояние-между paбoчи и концами собачек;
п - количество зубьев колеса 5,
расположенных между ними, 1 - шаг храпового колеса.
Основные параметры контейнера (дли„а рычага 18. вес груза 19. амплиту- 5 да его качания, необходимая для поворота храпового колеса 5) определяются в зависимости от условий,транспортировки (автомобильный, железнодорожный или авиационный транспорт).
Данный контейнер обеспечивает пол нее отсутствие фреттинг-коррозии и сохранность подшипникового узла как
uuAton„infiKiM ВИЛОМ транс-лриме jui -, ..t-v-,-i-
при Р«« °Р™Р° ; / енш в уело- 15во благодаря достаточно мощному и подпорта, так как и при .дающемуся расчету автономному источвиях вибраций и наличия потенциальной энергии (например нических воздействий, « ьшающих вза пружина) является боимное возвратно-поступательное микро ° J, адежным при эксперемещение сопряженных в любых условиях траиспор.шипникового узла, приводящее « образо е опорами без ограванию фреттинга с „з. положения контейнера и величивитием фреттинг-коррозии. „,, импульсов, раскачивающих автономболее эффективных способов предупреж уетановленньй рьмаг с неуравнодения этого вида дефекта .является од „„ьтм грузом, независимо от массы нонаправпенное ступенчатое поступатель- „окоя подшипниковой опоры, ное или вращательное движение сопряи ин рци
1116237
женных деталей, обеспечивающее вывод продуктов усталостных разрушении, образующихся при фреттинге, из зон контактов с повышенным удельным давлением (например, точечные контакты тел качения пар в шарикоподшипниках). Именно это условие соблюдается в предлагаемой конструкции контейнера при помощи устройства, обеспечивающего периоди10 ческий однонаправленный ступенчатый поворот вала относительно тел качения шарикоподшипников.
Кроме того, предлагаемое устройст...п .лг пЧХГЧиГ 7 И ПОД
f
5
18
13
(pui.2
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ОТКЛОНИТЕЛЬ | 1997 |
|
RU2126080C1 |
| СПОСОБ РАБОТЫ РУЧНОГО ИМПУЛЬСНОГО РЕГУЛИРУЕМОГО ПРИВОДА И РУЧНОЙ ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2011 |
|
RU2484350C2 |
| Вибросмеситель | 1986 |
|
SU1417912A1 |
| Контейнер для транспортировки совмещенных подшипников качения | 1979 |
|
SU1073502A1 |
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| Грузоподъемная тележка | 1979 |
|
SU850473A1 |
| ТЯГОВАЯ МАШИНА С ПОЧВООБРАБАТЫВАЮЩИМИ ПРИЦЕПНЫМИ ОРУДИЯМИ, ПРИВОДИМЫМИ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2013 |
|
RU2520851C1 |
| СЧЕТЧИК ИНГАЛЯТОРА | 2006 |
|
RU2388052C2 |
| СПОСОБ ПРЕДОХРАНЕНИЯ ПОДШИПНИКОВ КАЧЕНИЯ ОТ ДЕФОРМАЦИЙ ПРИ ТРАНСПОРТИРОВКЕ | 1972 |
|
SU422878A1 |
КОНТЕЙНЕР ДЛЯ ТРАНСПОРТИРОВКИ И ХРАНЕНИЯ ПОДШИПНИКОВОЙ ОПОРЫ ТУРБОХОЛОДИПЬНИКА, содержащий корпус, установленный в нем вал для подшипниковой опоры и механизм для создания поворота вала, включающий рычаг с грузом, смонтированное на валу храповое колесо и собачку, отличающ и и с я тем, что, с целью повьшения надежности работы при малых амплитудах колебаний в горизонтальном положении контейнера за счет обеспечения принудительного апериодического однонаправленного ступенчатого поворота вала, механизм для создания поворота вала снабжен смонтированной на стенке корпуса осью, на которой размещены рычаг с грузоми собачка, установленной на этой оси подпружиненной дополнительной собачкой, противоположно направленной основной, и плоской пружиной, закрепленной одним концом на валу, другим - на стенке корпуса, основная собачка выполнена со штифтом, взаимодействующим с дополнительной собачкой, а расстояние L j между рабочими концами собачек равно (Л L 0,51
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА | 2019 |
|
RU2725903C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПРЕДОХРАНЕНИЯ ПОДШИПНИКОВ КАЧЕНИЯ ОТ ДЕФОРМАЦИЙ ПРИ ТРАНСПОРТИРОВКЕ | 1972 |
|
SU422878A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
