Изобретение относится к испытате.чьным устройствам и может быть использоЕ ано для испытания рукавов высокого давления.
Известен стенд для испытания рукавов высокого давления, содержащий основапие, привод, бак, распределитель, фильтр, подвижный и неподвижный коллекторы, гидро шлиндр изгиба рукавов, обратный , конечные выключатели 1.
Наиболее близким по технической cvin,ности и достигаемому эффекту к предлагаемому является стенд для испытания рукавов гидросистем, включающий основание, привод, бак, распределитель, фильтр, подвижный и неподвижный коллекторы, гидроцилиндр изгиба рукавов, кипематически связанный с рычагом, на котором закреплен подвижный коллектор, обратный клапан, конечные выключатели. В сливную .магистраль гидроцилиндра изгиба рукавов включен дроссель с обратным клапаном и золотником, снабженным сменным копиром фигурного профиля, который взаимодействует с подвижным коллектором, перемещающимся по направляющим, связанным со штоком гидроцилиндра изгиба рукавов 2.
Однако во всех известных стендах, установка в системе стенда в качестве звена, задающего закон изменения давления рабочей жидкости, механического копира не позволяет воспроизвести необходимый стандартный закон изменения давления в испытываемых рукавах (ГОСТ 25452 - 82). Это объясняется те.м, что использование в системе известного стенда такого копира не дает возможности воспроизвести требуемый стандартом мгновеЕшый сброс давления в рукавах, т. е. мгновенное полное открытие проходного отверстия дросселя, иначе говоря, перемещение щупа но копиру вертикально вверх. Кроме того, отсутствие обратной связи между изменением давления в испытываемых рукавах и задающим это изменение органом (кониром) увеличивает инерционность системы и не позволяет, таким образом, стабильно воспроизводить заданный закон изменения давления рабочей жидкости.
Рукава высокого давления в процессе эксплуатации одновременно воспринимают сумму из двух основных видов нагружения (нагрузки от пульсации давления жидкости и нагрузки от изгиба рукавов) в различных количественных соотношениях в сум.марной нагрузке, то для их ис1Ц)1таний важно иметь в стенде возможность нагружения рукавов всегда одновременно суммарной нагрузкой е различными вариациями количественных соотношений, составляющих сумму видов нагружения. Это более позволит приблизить условия испытаний к экспл атационным. Такой возможности лишены известные стенды, так как их золотник, уменьщающий живое сечение дросселя и создаюп1ий давление рабочей жидкости в
рукавах, т. е. нагружение их пульсацией, работает только в один полупериод цикла пагружения рукавов изгибающей нагрузкой (т. е. только при перемещении поршня гидроцилиндра изгиба рукавов влево, иначе
говоря, только при разгибании рукавов). В нолунериод изгиба рукавов нагружепие от пульсаций давления рабочей жидкости не воспроизводится. .Это пе позволяет еинхронизировать во времени оба указанных вида нагружения рукавов и получать в различные моменты времени в период цикла нагружения различные количественные соотношения сум.м этих нагрузок. И те.м более, эти стенд|)1 не позволяют синхронизировать нагружение рукавов пульсацией с различным по фазе нагружением их изгибающими нагрузками.
Целью изобретения является Обеспечение возможноети нагружения рукавов пульсапией жидкости но стандарт1юму закону, а также синхронизации нагружения пульсацией с различны.м по фазе на|-ружением изгибающими нагрузками.
Поставленная цель достигается тем, что
стенд для испытания рукавов высокого давления, включающий ос11овапие, привод, бак, распределитель, подвижный и неподвижный коллекторы, гидродвигатель механизма изгиба рукавов, кинематически связанный с
его рычагом, на котором закрег чен подвижный коллектор, обратный клапан, конечные выключатели, снабжен рабочим гидропилиндром, кривошипом, двумя прелохра; ителы1ыми и дву.мя дополнительными
обратными клапанами, причем порщневая полоет } рабочего гидроцилиндра через обратпый клапан связана с неподвиж11ым коллектором и через первый дополните,льный обратный клапан с баком и выходо.м распределителя, вход которого подсоединен к неподвижному коллектору, кроме тогО, одно плечо рычага мехнизма изгиба рукавов связаЕю с основанием щарнирно, а другое - через упругий элемент, при этом н;ток рабочего гидроцилиндра кинематически сзязан с кривощином, устанор.ленпьгм с воз.можностью новорота при помощи п)ивода и взаимодействия с конечными выключателя.ми, аштоковая полость этого гидроцилиндра соединена с одной из полостей гидоодвигателя механизма изгиба рукавов и через второй дополнительный обратный клапан с баком, по.ми.мо этого поришевая и щтоковая полости рабоче о гидропилиндра, соответственно через первый и второй предохранительные клапаны соединены с баком.
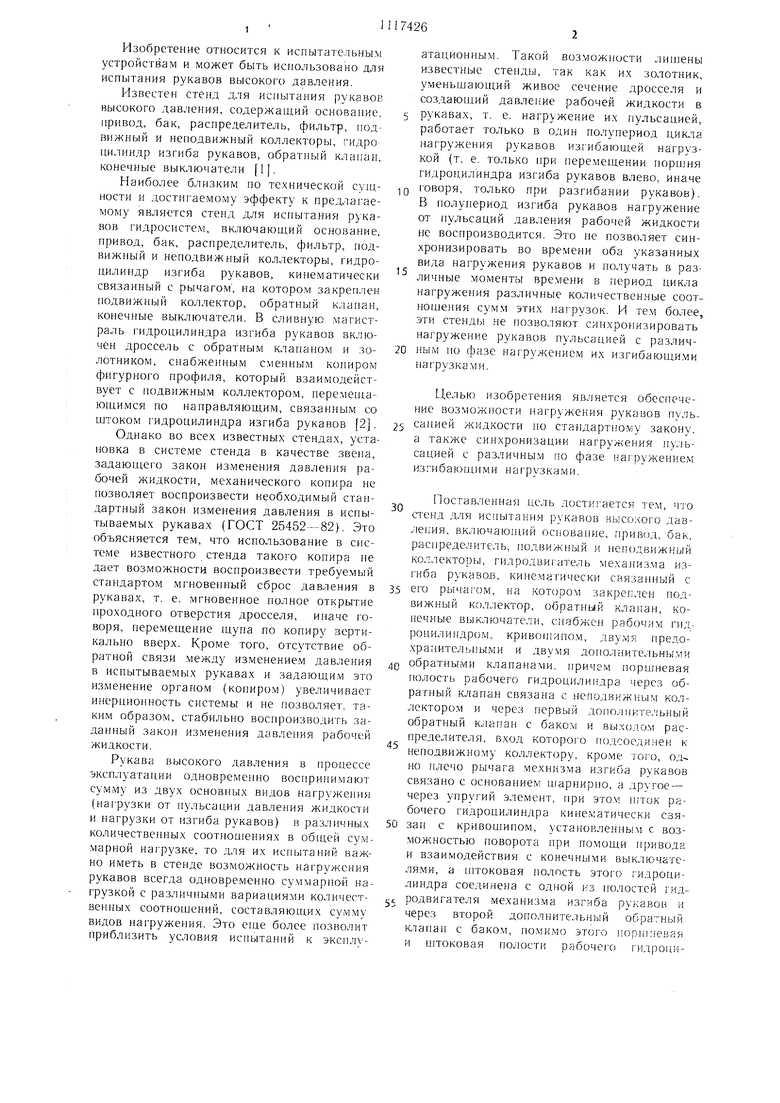
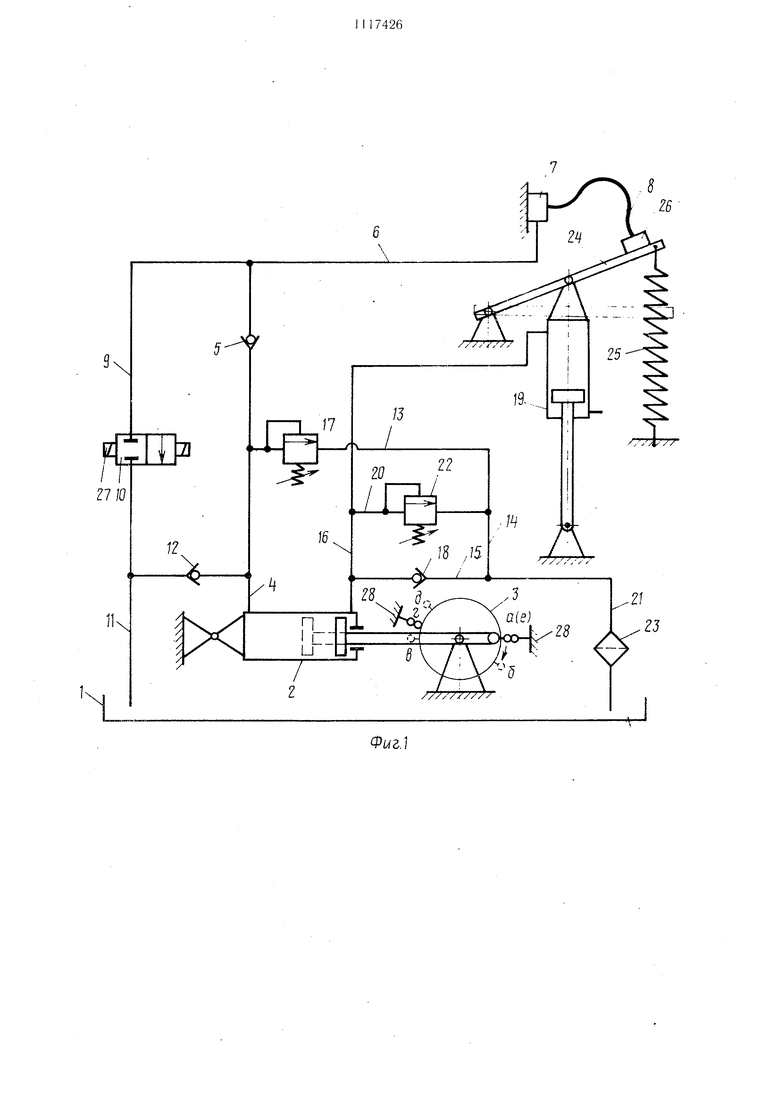
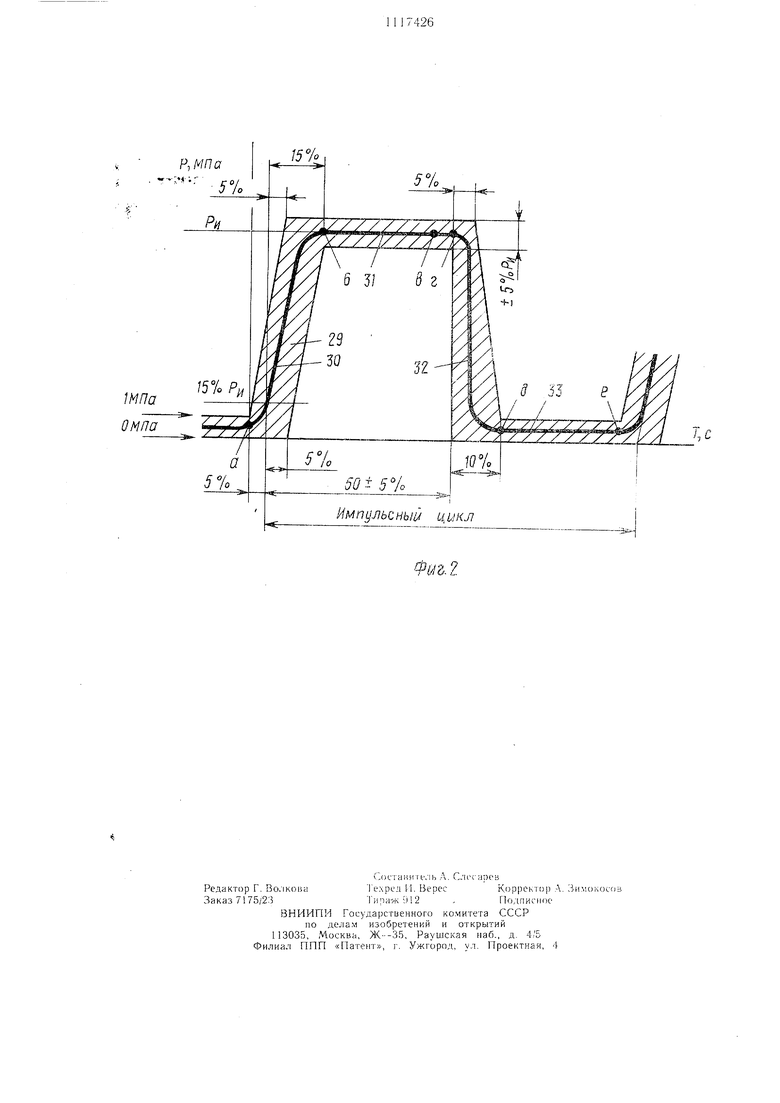
На фиг. 1 представлена принципиальная схема предлагаемого стенда для испытания рукавов высокого давления в положении, соответствуюп ем началу импульсного цикла; на фиг. 2 - кривая, характеризующая закон изменения давления при испытаниях рукавов (импульсный цикл) по ГОСТ 25452-82.
Стенд (фиг. 1) содержит бак 1, рабочий гидроцилиндр 2, корпус которого шарнирно соединен с основанием. Гидроцилиндр 2 осуществляет работу от привода 3. Поршневая полость рабочего гидроцилиндра 2 через магистраль 4, обратный клапан 5 и магистраль 6 соединена с неподвижным коллектором 7, к которому подсоединены испытываемые рукава. 8. Эти рукава через магистраль 9, распределитель 10, например двухходовой золотник, и магистраль 11 соединены с баком 1. Через магистраль 4, дополнительный обратный клапан 12 и магистраль 11 с баком сообщается и порщневая полость рабочего гидроцилиндра 2. Кроме того, по магистралям 4, 13-16 через предохранительный клапан17 и дополнительный обратный клапан 18 поршневая полость рабочего гидроцилиндра 2 соединяется с одной из полостей (например, поршневой) гидродвигателя механизма изгиба рукавов, например гидроцилиндра 19. С этой же полостью гидроцилиндра 19 механизма изгиба рукавов по магистрали 16 соединяется щтоковая полость рабочего гидроцилиндра 2, которая, кроме того, по магистралям 16, 20, 14, и 21 через предохранительный клапан 22 и фильтр 23 соединяется с баком 1. Гидроцилиндр 19 механизма изгиба рукавов, например, своим штоком п;арнирно соединен с основанием. В этом случае его корпус кинематически связан с рычагом 24, одно плечо которого соединено с основанием шарнирно, а другое - через упругий элемент 25. На одном из плеч рычага 24 кренится подвижный коллектор 26, к которому подключаются испытываемые рукава 8. Соотношение плеч рычага 24 и другие параметры кинематической системы 19, 24, 25 и 26 подбираются исходя из размеров испытываемых рукавов и режимов испытаний. Для этого на рычаге имеется несколько посадочных мест для шарнирной связи с гидроцилиндром 19. При указанном подсоединении гидроцилиндра 19 его штоковая полость сообщается с атмосферой.
Упр;1В.. распределителем 10 может осущесгв/}яться, например, электромагни1ами 27 через конечные выключатели 28,
которые взаимодействуют с кривошипным механиз.мом привода 3 (например, с контактом, установленным на диске, неподвижно закрепленном на валу привода 3), кинеJ матически соединенного (например, шарнирно), со штоком гидроцилиндра 2.
Кривая (фиг. 2) характеризующая закон изменения давления в испытываемых рукавах по ГОСТ 25452-82 должна находиться
„ внутри заштрихованной области 29. Участок 30 (между точками а и б) характеризует скорость повышения давления в испытываемых рукавах. Участок 31 (между точками б и г) характеризует величину давления, необходимого для испытания рука ВОВ. Участок 32 (от точки г до точки д} соответствует сбросу давления в испытываемых рукавах до О-1 МПа„ под которым рукава находятся во второй половине цикла, что соответствует участку 33 (между точ0 камн дне).
Следует также отметить, что для изменения (сдвига) фазы нагружения рукавов изгибающими нагрузками отсоединяют магистраль 16 от поршневой полости гидро5 цилиндра 19 и связывают ее со штоковой полостью этого гидроцнлиндра. В этом случае поршневую полость связывают с атмосферой.
Кроме того, изменяют на противопо,пож0 ное направление действия упругого элемента 25 (на фиг. упругий элемепт, например пружина, установ,:1ен так, что его тяговое усилие направлено вниз; после переустановки этого элеме1гга его тяговое усилие должно быть naripaB.ieHO вверх).
Стенд работает с-чедующим образом.
За каждый импульсный цикл (фиг. 2) диск привода 3 совершает один оборот.
9
поршень раоочего гидроцилиндра
соответственно .аелает за это время один двойной ход (перемещается от начального положения, показанного на фиг. 1, до крайнего ,1евого положения и возвращается в исходное положение). За это время корпус гидроцилиндра 19 механизма изгиба рука5 ВОВ также совершает один двойной ход (движется вниз, неремен1,ая рычаг 24 в положение, показанное на фиг. 1, пунктиром и вверх, возвращая рычаг 24 в исходное положение и изгибая испытываемые рука0 ва 8).
При включении привода 3 диск вращается и двигает поршень рабочего гидроцилиндра 2. За время перемещения диска по дуге а б (фиг. 1) норшень гидроцилиндра 2 5 перемещается из крайнего правого положения в положение, показанное на фиг. 1 нунктиром, и давление жидкости в магистралях 4, 6, 9 и в испытываемых рукавах 8 новышается до величины Ру, (испытательное). Участок возрастания давления от О-до Р соответствует отрезку а, б на фиг. 2.
В это же время жидкость из норшневой по.юсти гидроцилиндра 19 механизма изгиба рукавов переливается в штоковую полость рабочего гидроцилиндра 2 нод действием yripyioro элемента 25, который в то же время перемендает рычаг 24 из исходного положения в нижнее положение, показанное на фиг. 1 цунктиром, разгибая испытываемые рукава 8.
При достижении в испытываемых рукавах 8 давления Р„ (точка б на фиг. 2) открывается предохранительный клапан 17, настроенный на это давление, и избыток жидкости из поршневой полости рабочего гидроцилиндра 2 сливается в бак 1 по магистралям 4, 13, 14 и 21.
За это время диск привода 3 сделает полоборота от точки а (дуга а, б, в на фиг. 1), а поршень рабочего гидроцилиндра 2 пере.меп1.ается в крайнее левое положение, что соответствует точке в на фиг. 2.
После этого поршень рабочего гидроцилиндра 2, ведомый диском привода 3, перемещается вправо. Жидкость из штоковой полости рабочего гидроцилиндра 2 по магистрали 16 подается в поршневую полость гидроп.илиндра 19 механизма изгиба рукавов и при достижении давления, преодолевающего сопротивление упругого элемента 25 и веса кинематической системы с рычагом 24 и испытываемыми рукавами 8, корпус гидроцилиндра 19 перемешается вверх, изгибая, испь тываемые рукава 8.
В то же вре.мя при перемещении диска привода 3 по дуге в, г (фиг. 1) давление Р., в испытываемых рукавах 8 поддерживается обратным клапаном 5, что соответствует отрезку в, г па фиг. 2. В точке г (фиг. 1) контакт, установленный на диске привода 3, замыкает конечный выключатель 28, который посредством электромагнита 27 перек чючает распределитель 10 (соответствует точке г на фиг. 2) и жидкость из испытываемых рукавов 8 сливается в бак 1, что соответствует участку г, д на фиг. 2.
При достижении корпусом гидроцилип.ара 19 механизма изгиба рукавов крайнего верхнего положения, соответствующего максимальному изгибу испытываемых рукавов 8, давление в порп1невой полости этого гидроцилиндра увеличивается и открывает предохранительный клапан 22. Избыток жидкости из штоковой полости рабочего 1идроцилпндра 2 через предохранительнь й клапан 22 по магистралям 14 и 21 сливается в бак 1.
Дав.1ение жидкости в испытываемых рукавах в это время (в течение пере.мещения поршня гидроцилиндра 2 на отрезок, соотЕзетствующий дуге д, е фиг. 1) находится в 5 пределах О-1 МПа, что соответствует участку д, е на фиг. 2. Точка е пройденно1-о цикла соответствует точке а (началу) следующего цикла.
Кроме того, во время перемещения порщo ня гидроцилиндра 2 вправо (дуга в, г, д, е на фиг. 1) в поршневую полость этого гидроцилиндра цостунает (всасывается) жидкость из бака 1 по .магистрали 11 через обратный клапан 12.
Б конце оборота диска привода 3 (точка е на фиг. 1) контакт, устанавливаемый на диске, замыкает конечный выключатель 28, который посредством электромагнита 27 возвращает распределитель 10 в исходное положение (фиг. 1).
0 Таким образом, показан один цикл синхронного нагружения рукавов пульсацией и изгибающими нагрузками. Далее начинается следующий аналогичный цикл. Если необходимо получить другие количест5 венные вариации сум.м двух этих нагрузок, из.меняют .места связи гидроцилиндра 19 с рычагом 24, т. е. соотношение плеч рычага 24. Стенд позволяет также воспроизводить синхронное riai-ружение рукавов пульсацией и изгибаю цими нагрузка.ми, прикладываемых к рукавам в различных фазах импульсного цикла. Для необходимо лишь сдвинуть по фазе приложение изгибающих нагрузок, как показано выше (т. е. пересоединив полости ;идроци5 .щпдра 19 и изменив направление де 1ствия упругого элемента 25).
Предлагаемый стенд позволяет обеспечить стабильное нагружение испытываемых рукавов пульсацией жидкости по стапдартQ нему закону и одновременное с ним нагру/KCFH-ic рукавов изгибаюплей нагрузкой. При это.м для обеспечения обоих указанных видов нагружения рукавов при.менепа едипая приводная система, позволяюп1ая использовать энергию привода с достаточно высоким КПД.
Кроме того, предлагаемый стенд позволяет синхронизировать во времени нагружение рукавов высокого давления пульсацией жидкости с различными по фазе из0 гибаюпхими нагрузками. Это в совокупьюсти с возможностью изменения плеч рычага мехапизма изгиба рукавов позволяет получать в процессе испытаний различные варианты количественного и фазного соотнощения указанных видов нагружения в обП1,ей суммарной нагрузке рукавов.
P,N/7a
. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для динамических испытаний рукавов | 1990 |
|
SU1828959A1 |
| Стенд для динамических испытаний рукавов высокого давления | 2022 |
|
RU2783583C1 |
| Стенд для испытания гидроподъемников самосвала | 1979 |
|
SU868425A2 |
| Испытательный стенд | 1989 |
|
SU1620909A1 |
| Стенд для испытаний поршневых гидравлических цилиндров с рекуперацией энергии | 2023 |
|
RU2811221C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ГИДРОЦИЛИНДРОВ | 2002 |
|
RU2234004C1 |
| Стенд для ресурсных испытаний гидроцилиндров | 1988 |
|
SU1541428A2 |
| Стенд для испытаний поршневых гидравлических цилиндров с рекуперацией энергии | 2022 |
|
RU2796721C1 |
| Стенд для испытания пневмогидроаккумуляторов | 1981 |
|
SU1017834A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ЦИКЛИЧЕСКОГО ИЗМЕНЕНИЯ НАГРУЗКИ СТЕНДА ДЛЯ ИСПЫТАНИЙ РУКАВОВ ВЫСОКОГО ДАВЛЕНИЯ | 2005 |
|
RU2287097C1 |
СТЕНД ДЛЯ ИСПЫТАНИЯ РУКАВОВ ВЫСОКОГО ДАВЛЕНИЯ, включающий основание, привод, бак, распределитель, подвижный и неподвижный коллекторы, гидродвигатель механизма изгиба рукавов, кинематически связанный с его рычзгом, на котором закреплен подвижный коллектор, обратный клапан, конечные выключател -:, отличающийся тем, что, с целью обеспечения возможности нагружения рукавов пульсацией жидкости, а также синхрониЗ.мши нагружения пульсацией с различным по фазе нагружением изгибающими нагрузками, стенд снабжен рабочим гидроцилиндром, кривощипом, двумя предохранительЕ1Ыми и двумя дополнительными обратными клапанами, причем порщневая полость рабочего гидроцилиндра через обратный клапан связана с неподвижным коллектором и через первый дополнительный обратный клапан с баком и выходом распределителя, вход которого подсоединен к неподвижному коллектору, кроме того, одно плечо рычага механизма изгиба рукавов связано с основанием щарнирно, а другое - через упругий элемент, при этом щток рабочего гидроцилиндра кинематически связан с кривощипом, установленШ ным с возможностью поворота при помощи привода и взаимодействия с конечными сл выключателями, а штоковая полость этого гидроцилиндра соединена с одной из полостей гидродвигателя механизма изгиба рукавов и через второй дополнительный обратный клапан с баком, помимо этого порщневая и щтоковая полости рабочего гидроцилиндра соответственно через первый и второй предохранительные клапаны соединены с баком. 4 ГС 05
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Эванс К | |||
| Технология рукавов | |||
| Пер | |||
| с англ | |||
| М., «Химия, 1978, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Солесос | 1922 |
|
SU29A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стенд для испытания рукавов гидросистемы | 1975 |
|
SU723241A1 |
| кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
