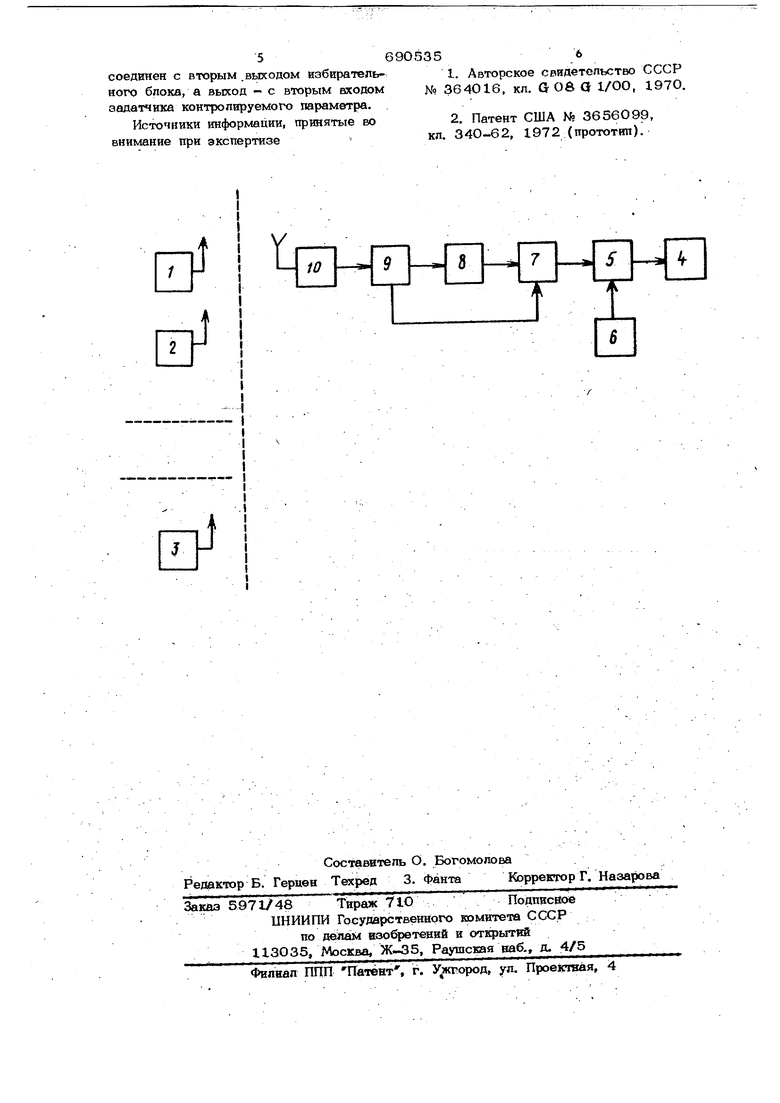
(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГРАФИКА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА циклов, избирательный блок 9, приемник 10. Устройство работает следующим образом. Транспортное средство совершает несколько рейсов (циклов) по замкнутому маршруту, проходя на каждом цикле последовательно все контрольные пункты. Движение транспортного средства по маршруту начинаетсяс первого контроль- ю ного пункта. При этом транспортному средству задается время прохождения , каждого контрольного пункта на каждом цикле, т.е. задается график движения. Этот график необходимо выполнить путе сравнения заданного графиком значения времени с текупхим значением времени прохождени: транспортным средством контрольных пунктов и, в случае отклонения текущего значения времени от заданного, воздействия на систему управления Двигателем транспортного средства. В момент первого прохождения (первый цикл) транспортным средством первого контрольного пункта приемник 1 принимает сигнал передатчика 1. Этот сигнал с приемника 10 через избирательный блок 9 поступает на первый. вход задатчика 7 контролируемого параметра. На второй вход задатчика 7-. контролируемотх) параметра с выхода формирователя 8 циклов поступает сигнал, значение которого характеризует . номер текущего цикла. В соответствии со значениями этих двух сигналов задатчик 7 контролируемого параметра выдает на второй вход арифметического блока 5 заданное графиком движения значение времени прохождения транспо ным средством первого контрольного пункта на первом цикле. На первый вхо арифметического блока 5с датчика 6 контролируемого,: парг ютра поступает текущее значение времени с момента вьйсода на маршрут транспортного средства. При отклонении текущего значения времени от заданного арифметический блок 5 находит величину и знак этого отклонения, а исполнительный блок 4, воздействуя на систему управriiSHHH двигателем транспортного средст в соответствии с найденными величиной и знаком отклонения, изменяет скорост движения. В момент прохождения транспортным средством на первом цикле второго контрольного пункта приемник 10 принимает 69 5.4 сигнал передатчика 2. Теперь задатчик 7 контролируемого параметра вьюаст в арифметический блок 5 заданное графиком движения значение времени прохождения транспортным средством второго контрольного пункта на первом цикле. Аналогично, в момент прохождения транспортным средством третьего, в примере - последнего, контрольного пункта на первом цикле задатчик 7 контропируемого параметра выдаст з аданное графиком движения значение времейй прохождения транспортным средством третьего контрольного пункта на первом цикле. Но при прохождении транспортным средством третьего, последнего контрольного пункта, в формирователь 8 циклов заносится единица сигналом, сформированным избирательным блоком 9, что соответствует окончанию первого цикла и началу второго цикла. При следующем, втором (второй цикл) прохождении транспортным средством первого контрольного пункта задатчик 7 выдает заданное графиком движения значение времени, но уже на втором цикле. Это значение времени выдается задатчиком 7 контролируемого параметра в соответствии с поступающими на его входы значениями синнала передатчика 1 и сигнала формирователя 8 циклов. Таким образом, значение выходного сиг- , нала аадатчика 7 контролируемого параметра зависит не только от номера проходимого транспортным средством контрольного пункта, -но и от номера цикла.. Формула изобретения Устройство для контроля графика движения транспортного средства, содержащее передатчики, установленные на, контрольных пунктах, и установленный на транспортнбм средстве приемник, выход которого через последовательно соединенные избирательный бпок и задатчик контролируемого параметра соединен с первым входом ари фметического блока, второй вход которого соединен с датчиком контролируемого параметра, выход арифметического блока соединен с исполнительным блоком, о т п и ч а ю щ е е с я тем, что, с целью расширения функциональных возможностей устройства, в него введен формирователь циклов, вход i Tbporo 5690 соединен с вторым .выходом избирательного блока, а выход с вторым входом аадатчика контролируемоtx параметра. Источники информации, принятые во внимание при экспертизе 35 1.Авторское свидетельство СССР № 364016, кл. GOea l/OO, 1970. 2.Патент США № 3656099, кл. 340-6 2, 197 2 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1978 |
|
SU744708A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| Устройство для подсчета пассажиров | 1984 |
|
SU1216785A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ДОПУСТИМОГО СБЛИЖЕНИЯ ДВУХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033359C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| УСТРОЙСТВО КОНТРОЛЯ СОБЛЮДЕНИЯ МАРШРУТА ЛОКОМОБИЛЕМ | 2013 |
|
RU2546750C1 |
| СИСТЕМА РЕГИСТРАЦИИ И КОНТРОЛЯ РЕЙСОВ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2586860C2 |
| Устройство для контроля и управления городским электротранспортом | 1983 |
|
SU1120392A1 |
| СИСТЕМА КОНТРОЛЯ ЗА ПЕРЕМЕЩЕНИЕМ И СОСТОЯНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2305327C2 |
uf
LJ
