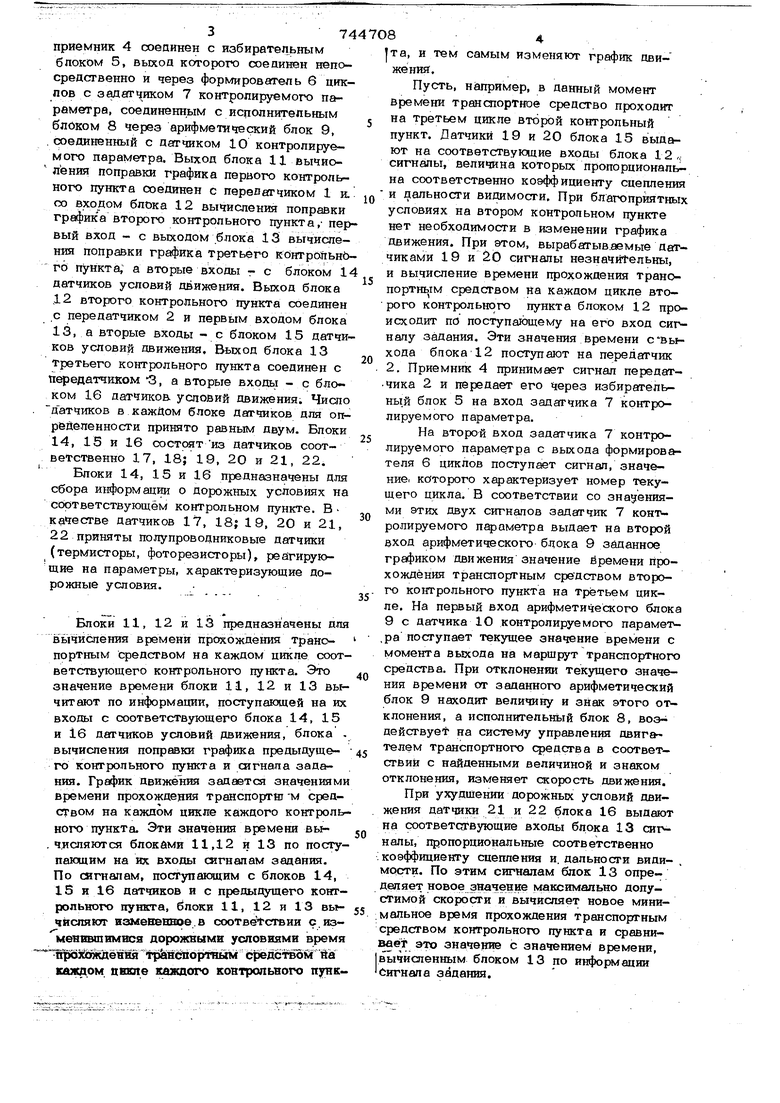
Изобретение относится к области уггравпения транспортными средствами. Известно устройство для определения местоположения объектов, содержащее рао попоженные на диспетчерском пункте и на подвижном объекте передатчики и приемник, соединенные со входами элементов И, выходы которых подключены к счетчикам циклов, а также датчик времени и блок регисградии 1 . Наиболее близким техническим решением к предлагаемому является устройство, содержащее передатчики, установленные на контрольных пунктах, и установле ный на транспортном средстве приемник, Ьоединенный с избирательным блоком, вы ход которого соединен непосредственно и через формирователь циклов с задатчиком контролируемого п аметра, соединенным с исполнительным блоком через арифметичесзсий блок, соединенный с датчиком контролируемого параметра 2 . В устройстве отсутствует возможность изменения графика движе что сужает функциональные возможности устройства. Цель изобретения - расширение функциональных возможностей устройства. Поставленнай цель достиг тся что в устройство введены на каясдом кб нтрольном пункте блок дегтчиков условий движения и блок вычисления поправок графика, выходы блоков дегтчиков условий движения подключены ко входам соответствующих блоков вычисления поправок графика, выход каждого ю которых соединен со входом соответствующего передэтчика и с дополнительным входом блока вычисления поправок графика, установленного на последующем по маршруту движения контрольном пункте. На чертеже представлена структурная схема устройства. Устройство содержит устанавливаемые на контрольных пунктах передетчики 1,2 и 3. Для определенности число контрольных пунктов принято равным трем. Устанавливаемый на транспортном средстве приемник 4 соединен с избирательным блоком 5, выхоа которого соединен непосредственно и через формирователь б циклов с задагчиком 7 контролируемого параметра, соединенным с исполнительным блоком 8 через арифметический блок 9, . соединенный с датчиком 10 контролируемого параметра. Выход блока 11 вычио ления поправки графика первого контрольного пункта соединен с передатчиком 1 и. входом блока 12 вычисления поправки графика второго контрольного пункта,- пер вый вход - с выходом блока 13 вычисления поправки графика третьего кьнтрб;пьнбго пункта, а вторые входы т с блоком 14 датчиков условий движения. Выход блока ,12 второго контрольного пункта соединен с передатчиком 2 и первым входом блока 13,а вторые входы - с блоком 15 датчиков условий движения. Выход блока 13 третьего контрольного пункта соединен с передатчиком 13, а вторые входы - с блоком 16 датчиков условий движения. Число Датчиков в каждом блоке Датчиков для опрейеленности принято равным двум. Блоки 14,15 и 16 сострятиз датчиков соответственно 17, 18; 19, 2О и 21, 22. Блоки 14, 15 и 16 предназначены для сбора информации о дорожных условиях на соответствующем контрольном пункте. Вкачестве датчиков 17, 18; 19, 20 и 21, 22 приняты полупроводниковые датчики (термисторы, фоторезисторы), реагирук щие на параметры, характеризующие дорожные условия. -..... I Блоки 11, 12 и 13 предназначены для вычисления времени прохождения транопортным средством на каждом цикле соответствующего контрольного пункта. Это значение времени блоки 11, 12 и 13 вьь читают по информации, поступающей на их входы с соответствующего блока 14, 15 и 16 датчиков условий движения, блока . вычисления поправки графика предыдущего контрольного пункта и сигнала задаНИН. График движения задается значениями времени прохождения транспортш м средством на каждом цикле каждого контроль ного пункта. Эти значения времени вы. Ч.ИСЛЯЮТСЯ блоками 11,12 и 13 по поступающим на их входы сигналам задания. По сигналам, поступающим с блоков 14, 15 и 16 датчиков и с предыдущего контрольного пункта, блоки 11, 12 и 13 Bbtчиспяют измененное.в соотвеЧ-сгвии с.из {енввшвмнся дорожными условнямн время ЩюШадвнм т{Шб11ортны каждом пнкпе каждого контрольного пункT а, и тем самым изменяют график движения. Пусть, например, в данный момент времени траноюртное средство проходит на третьем цикле второй контрольный пункт. Датчики 19 и 20 блока 15 выдают на соответствующие входы блока 12 « сигналы, величина которых пропорциональна соответственно коэффициенту сцепления и п.апьносгк видимости. При благоприятных условиях на втором контрольном пункте нет необходимости в изменении графика движения. При этом, вырабатьтв.аемые датчиками 19 и So сигналы незначительны, и вычисление времени прохождения транопортньш средством на каждом цикле второго контрольного пункта блоком 12 происходит по поступающему на его вход сигналу задания. Эти значения времени свыхода блока 12 поступают на передатчик 2. Приемник 4 принимает сигнал передатчика 2 и передает его избирательны.й блок 5 на вход задаггчика 7 контролируемого параметра. На второй вход задатчика 7 контролируемого параметра с выхода формирователя 6 циклов поступает сигнал, значение, которого х актеризует номер текущего цикла. В соответствии со зна ениями этих двух сигналов задатчик 7 контролируемого п аметра выдает на второй вход арифметического блока 9 заданное графиком движения значение ёремени прохождения транспортным средством второго контрольного пункта на третьем цикле. На первый вход арифметического блока 9 с датчика 10 контролируемого парамер,ра поступает текущее значение времени с момента выхода на маршрут транспортного средства. При отклонении текущего значения времени от заданного арифметический блок 9 находит величину и знак этого отклонения, а исполнительньгй блок 8, воэдействует на систему управления двигателем транспортного средства в соответствии с найденными величиной и знаком отклонения, изменяет скорость движения. При ухудщении дорожньк условий движения датчики 21 и 22 блока 16 выдают на соответсявующие входы блока 13 сигналы, 1фопорциональные соответственно ;коэффициенту сцепления и. дальности види- , мости. По этим сигналам блок 13 определяет новое значение максимально допустимой скорости и вычисляет новое минимальное время прохождения транспортным средством контрольного пункта и сравнивает это значение с значением времени, вычисленным блоком 13 по информации Сигнала задания. В случае превышения минимального времени над временем, найденным по сигналу задания, блок 13 увеличивает на величину этого превышения время прохождения транспортным средством третьего контрольного пункта. При этом новое значение времени передается-с выхода блока 13 на передатчик 3 и на первый вход блока И, который увеличивает, время прсясождения транспортным средством первого контрольного пункта и передается новое значение этого времени на первый вход блока 12, который , в свою очередь, изменяет время прохождения второго контрольного пункта и так Дш1ее. Таким образом, график движения равномерно смещается одинаковым изменением времени на всех контрольных пунктах..
Экономическая эффективность от иопользования предлагаемого устройства оп- 2о ределяется указанными выше его техническими преимуществами. формула изобретения js Устройство для управления движением транспортного средства, содержащее установленные на контрольных пунктах передатчики и установленный на транспортном JQ средстве приемник, выходом подключенный
ны ко входаг Ссоответсшующих блоков вычисления поправок графика, выход каждо- . го из которых соединен со входом соответствующего передатчика и с дополни- ко входу избирательного блока, выходы которого соединены непосредственно и через формировагепь циклов со входами задатчика контролируемого параметра, выход которого подключен к первому входу ари(} метического блока, второй вход которого подкгаочен к даггчику контролируемого параметра, а выход соединен с исполнительным блоком, отличающееся .тем, что, с целью расширения функциональных возможностей устройства, в него йведецы на каждом контрольном пункте блок датчиков условий движения и блок вычиспеноя поправок т афЕска, выходы бпоков датчиков условий движения подключетельным входом блока вычисления поправок графика, установленного на последующем по маршруту движения контрольном пункте. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N4 364016, кп. G 08 G 1/00, 21.12.70. 2.Авторское свидетельство СССР по. заявке № 2458326, кл. G 08 G 1/12, 01.03.77 (прототип). 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля графика движения транспортного средства | 1977 |
|
SU690535A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2215299C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| НАВИГАЦИОННОЕ КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ЛОКОМОТИВОВ-РЕЛЬСОСМАЗЫВАТЕЛЕЙ | 2009 |
|
RU2394716C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НАДВОДНОГО ОБЪЕКТА | 1999 |
|
RU2152049C1 |
| Система дистанционного контроля поставки материальных и технических ресурсов для восстановления объектов инфраструктуры | 2020 |
|
RU2734064C1 |
1б1
I
Си
Заказ 3822/17
ЦНИИПИ
Филиал ППП татент, г. Ужгород, ул. Проектная, 4
fKin-fKe stfTf iHIMiiif.
Подписное
Тираж 682
