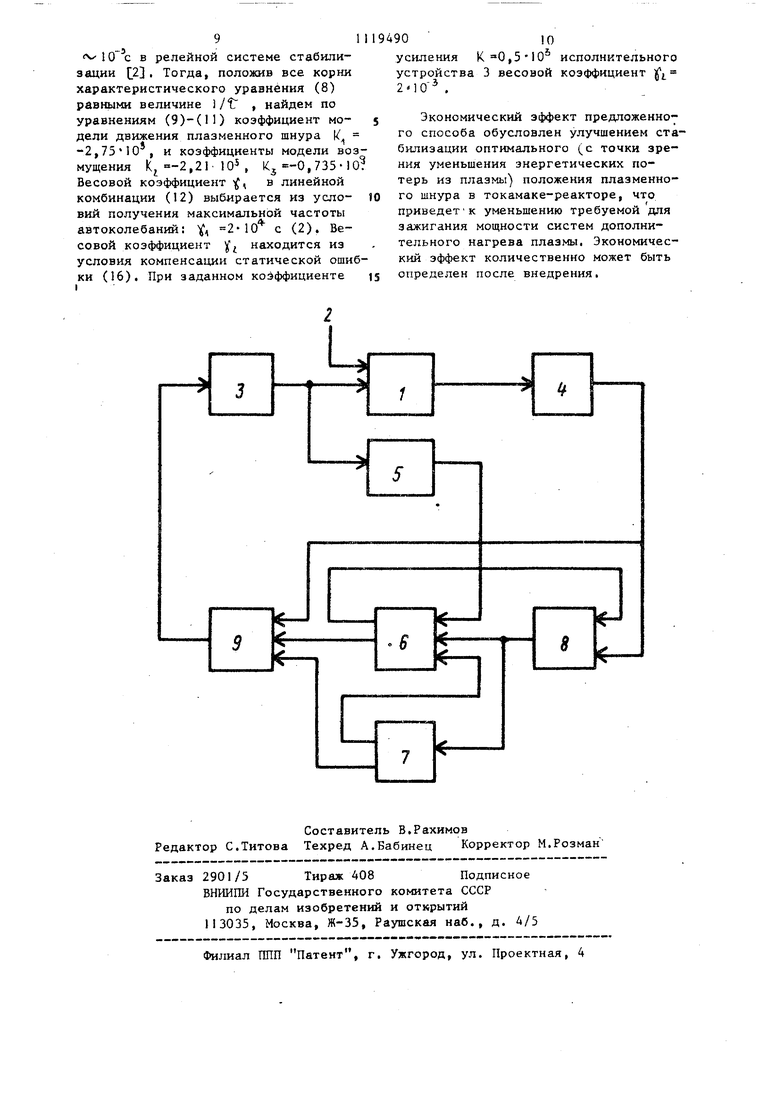
Нэобретекие относится к об/1асти аэтоматического управления процессами в термоядерных установках и может быть использовано в системах управле ния равновесным положением плазменно го шнура по большому радиусу в термо ядерных устанавках типа токамак. Известен способ стабилизации положения плазменного шнура относитель но заданного положения равновесия в токамаке, основанный на введении линейной обратной связи по состоянию с применением интегрирующего звена в замкнутом контуре стабилизации 03 « Интегрирующее звено используется для введения в сигнал управления (корректирующий сигнал) составляющей пропорциональной интегралу от смещения плазменного шнура относительно заданного положения равновесия. Это позволяет уменьвшть статическую ошиб ку, возникающую при стабилизации положеш{Я шнура. Недостатком известного способа яв ляется значительное уменьшение облас ти устойчивости замкнутой систеьш иэ-за наличия интегрирунадего звена в контуре стабилизации Уменьшение запаса устойчивости замкнутой системы может существенно увеличить время пе реходных процессов и сделать неприемлемой точность стабилизации. Известны также способы стабилизации прложения плазменного шнура в токамаке, основанные на изменении управляющего магнитного поля, перпен дикулярного плоскости плазменного шнура, в соответствии с корректирующим сигналом, не содержащим интегральной составляющей от смещения плазменного шнура. Среди этих способов наиболее близким по технической сути к предлагаемому изобретению является способ стабилизации положения плазменного шнура в токамаке, основанный на изменении управляющего магнитного поля, перпендикулярного плоскости плазменного шнура, в соответствии с измеряеьв 1м смещением плаз менного шнура из-за возмущения,вызванного изменением внутренней нидуктивности плазменного шнура и изме нением отношения газокинетического давления плазьш к давлению магнитного поля плазменного тока 121. Однако известньй способ имеет низкую точность стабилизации. Во-пер вых, это обусловлено тем, что для фо мирования корректирующего сигнала требуется дифференцировакке сигнала о смещении плазменного шнура, которое осуществляется дифференцирующим звеном при реализации известного способа. Реальное дифференцирующее зае но имеет инерционность, что снижает точность дифференцирования, а следовательно, и точность стабилизации. Во-вторых, действие указанного возмущения приводит к возникновению статической ошибки стабилизации. Целью изобретения является повышение точности стабилизации положения плазменного шнура в токамаке. Поставленная цель достигается тем, что в способе стабилизащии положения плазменного шнура в токамаке, основанном на изменении управляющего магнитного поля, перпендикулярного плоскости плазменного шнура, в соответствии с измеряемым смещением плазменного щнура нз-за возмущенияj вызванного изменением внутренней индуктивности плазменного щнура и изменением отношения газокинетического давления плазмы к давлению магнитного поля плазменного тока определяют временные производные смещения и возмущения с использованием модели днижения плазменного шнура и модели возмущения, причем модельные величины смещения и возмущения приближают к измеряемой величине смещения и неконтролируемой величине возмущен1 я посредством воздействия на обе модели разностным сигналом, получаемым путем сравнения величины измеряемого смещения и его модельного значения, и воздействуют на модель движения плазменного шнура сигналом, пропорциональным управляющему магнитному полю н модельной величине возмущения, формируют корректирующий сигнал путем сложения сигналов, пропорциональных измеряемому смещению плазменного шнура и модельным временным производным смещения и возмущения.и в соответствии с этим сигналом производят изменение управляющего магнитного поля. Суть предлагаемого способа основана на том, что корректирующий сигнал, в соответствии с которым производят изменение управляющего магнитного поля, формируют как линейную комбинацию величины измеряемого смещения плазменного шнура и модельных временных производных смещения и воз мущения . Эти модельные величины получают с использованием в замкнутой системе управления моделей движения плазменного шнура и неконтролируемого возмущения. Применение в линейной комбинации корректирукнцего сигнала модельной временной производной смещения увеличивает точность дифференцирования, а наличие в указанной ком бинации модельной временной производной возмущения компенсирует статическую ощибку стабилизации положения плазменного шнура Как показано в прототипе, уравнение движения плазменного тиура с учетом вакуумной камеры можно пред ставить в виде x,--fJt ;.Vf. где Х - измеряемая величина смещения ; Х - величина, пропорциональная управляющему магнитному полю;W - внешнее неконтролируемое возмущение. Данное возмущение вызвано изменением суммы величины: (Ц.л t /2, где Ч- - отношение газокинетического давления плазмы к давлению магнитног го поля плазменного тока; t( - внутренняя индуктивность плазменного шнура. Уравнением (1) описывается динаьшческое звено первого порядка с передаточной функцией вида: 1 + Тр , где KO-I/ Z - коэффициент усиления; - постоянная времени} р- оператор дифференцирования. На вход этого звена поступает сумма величин (U Xj , & выходом является величина У . Возмущения U) можно аппроксимировать кусочно-линейной функцией вре мени вида: U)(t) --fl( + ei(j,t. , , o(i - неизвестные константы, которые могут скачками изменяться произвольным образом в случайные моменты времени. Участки времени, на которых функция (3) изменяется линейно, связаны с дополнительным нагревом плазмы, например, индекциек, и ее остыванием, а скачки обусловлены возникновением плазменных неустойчив ост ей. Функция времени (3) может генерироваться системой с уравнениями динамикигде , Я -Г состояния возмущения; - С5, сУг - вектор, компоненты которого являются последовательностями неизвестных, случайно возникающих дельта-функций со случайными весами. Уравнения движения плазменного шнура (1) совместно с уравнением возмущения(4) можно представить как уравнение объекта управления в векторно-матричном виде: На осиованив зтого уравнения можно построить дифференциальное уравнение, описывающие модель движения плазменногр шнура и неконтролируемого возмущения, в виде: где « , С) , я - модельные, величины соответственно смещения и возмущения. Полученное уравнение (6| позволяет получить асимптотическую оценку состояния плазменного шнура и возмущения при соответствукмцем выборе параметров К , К , 1С . Вычитая из (5) уравнение (6), получим уравнение ошибки оценки состояния в виде . На интервалах времени между моментами действия дельта-функций S , (i. решение уравнения (7) должно пред ставлять собой линейную комбинацию ставлять сооои линеннук серии функциГ ; (е 1 - собстве1Гные вектс 1оры матрицы уравнения (7), - /1 - действительные отрицательные корни характеристи ческого уравнения (f,)-,M-f.X,0 (8 для матрицы (7), обеспечивающие тре буемую скорость стремления вектора ошибки к нулю. Получение желаемых значений действительных корней урав нения (8)можно обеспечить заданием параметров k , )( , К , которые п лучаются приравниванием соответству щих коэффициентов уравнения (8) и коэффициентов желаемого характеристического уравнения .nfb.).o, а именно -,.-(, (9 Таким образом, если ) О, то модельная величина смещения X, стре мится к измеряемому смещеиию У, , а модельная неличина неконтролируемого возмущения (и стремится к самому неконтролируемому возмущению ш тем быстрее, чем больше Алим()1) . Величина makc( i ) ограничена сверху частотным диапазоном элементов реализации предлагаемого способа. Для обеспечения качественной стабилизации по ложения плазменного шнура корректирующий сигнал следует выбирать в виде:-Х,1,. как реальное дифференцирующее зв но имеет инерционность, снижающее точность дифференцирования, а величи на О) не контролиремая, то корректирующий сигнал предлагается формировать в виде: , (12) где X, ,ы - модельные временные производные смещения и возм щения определяются с использованием выражения (6) без применения операции дифференцирования. Если применяется линейный преобразователь корректирующего сигнала Z в ЭДС на витках, создающих управляющее магнитное поле, и если постоянная времени этих витков Г(Г 2Г/я (где Z и R - соответственно индуктивность и активное сопротивление витков) много больше постоянной времени модели движения плазменного шнура, то величина Х пропорциональна интегралу от величины Z . Если применяется релейньй преобразователь (2), то среднее значение величины X, пропорционально интегралу от величины Z , а коэффициент пропорциональности находится из условий вибрационного сглаживания автоколебаниями нелинейной характеристики релейного элемента. При вибрационном сглаживании медленно ме няющиеся средние значения сигналов в замкнутой автоколебательной системе проходят так, как будто бы релейная характеристика заменена на непр«йрывную, 5оторую можно аппроксимировать линейной. В результате в случае линейного преобразователя для величины У , в случае релейного преобразователя усредненной по времени величины V имеем: где X - коэффициент пропорциональности, а знак минус учитывает то, что обратная связь в замкнутой устойчивой системе должна быть отрицательной. Подставляя в (1) выражение (13) с использованием передаточной функции (2), получим уравнение, связающее величину измеряемого смещения /, с величиной корректирующего сигнала Z и величиной возмущенияu): W(p).(.a), (,д) Уравнение (14) в случае релейного преобразователя справедливо для усредненных по времени величин У и Z . После окончания переходного процесса приближения х, , ( к X;, , ю через время порядка, «) справедливы равенства: л ш - W . Подставляя в, (14) выражение для / из (12) с учетом (15), получим дифференциальное уравнение замкнутой систеьвз управления относительно Tit, (,)x, + КрКк,--K. Из уравнения (16) Ьидно, что если Y 0, то величина х. содержит ст тическую ошибку , п / пропорциональную скорости линейного изменения B03M3fci eHHH uj , Если выбрать параметр v так, что Г1 /к, то правая часть в уравнении (16) будет равна нулн независимо от величины со , что приводит к нулевой статической ошибке y.(c.i) 0 относительно заданного положения равновесия и повышает точность стабилизации. Итак, формирование корректирукяцего сигнала 2 в виде (12) позволяет избежать операции дифференцирования величины х , а также позволяет компенсировать статическую ошибку Xfci) наличием в линейной комбинации Z ела гаемого, пропорционального модельной временной производной неконтролируемого возмущения to . Рассмотрим предлагаемьй способ на примере устройства стабилизации положения плазменного шнура по большому радиусу относительно заданного положения равновесия в токамаке. Структурная схема устройства представлена на чертеже. Устройство, реализующее предлагае мый способ, подключено к объекту управления 1, представляющему плазменНЕ ш шнур и вакуумную камеру, причем на объект управления действует неконтролируемое возмущение 2, вызванное изменением внутренней индуктивности плазменного шнура и изменением отношения газокинетического дав ления плазмы к давлению магнитного поля плазменного тока. Управляющее поле Xj создает исполнительное устройство 3. Смещение X, и управляющее магнитное поле х, измеряются с помощью соответствующих измерительных блоков 4 и 5. Модельные величины сме щения ч и возмущения fj и их времен ные производные V , Q формируют908ся моделью движения плазменного шнура 6 и моделью возмущения 7. Блок сравнения 8 создает разностный сигнал путем сравнения величины измеряемого смещения Х и его модельного значения Ь1ход блока 9 формирования корректирующего сигнала подключен к входу исполнительного устройства 3. Поскольку на входы объекта 1 и модели движения плазменного шнура 6 подается сигнал, пропорциональный управляющему магнитному полю У также на соответствующие другие входы объекта и его модели поступают соответственно возмущение и егЪ модельное значение, то разностный выходной сигнал блока сравнения 8, воздействуя на входы обеих моделей, подстраивает их по состоянию к объекту и возмущению. Таким образом осуществляется асимптоматическое приближение модельных величин смещения и возмущения |5 к измеряемой величине смещения у, и неконтролируемой величине возмущения ifj , Корректирующий сигнал Z, формируется блоком 9 из выходных сиг- налов модели движения плячменнпго шнура 6 - ц , модели возмущения 7 ш и объекта 1 - у , в виде (12)о Формирование сигнала Z в таком виде повышает точность стабилизации устройством величины х при действии возмущения W , как показано в теоретическом обосновании сущности способа. Приведем расчет всех параметров устройства для заданных значений параметров объекта стабилизации. Параметры объекта примем следуюише: постоянная времени Т 0,410 с; козффициент усиления 1,36-см/кА, равный отношению смещения плазменного шнура к вызвавшему его приращению тока в витках управления. Козффициеит усиления измерительного блока 4 7 0,4 В/см, причем выходной сигнал зтого блока измеряется в вольтах. Тогда коэффициент усиления v 0,544 В/ /кА. Коэффициент усиления измерительного блока 5- 1,85 В/кА. Компенсировав на входе модели движения плазменного шнура 6, к которому подключен выход блока 5, коэффициент , обратным.ему коэффициентом 1 v 0,54, можно найти коэффициенты модели 6: f 1/К 1,838, §, 1/Т, 1,36-10. Положим постоянную ьрсмсчш экспонент решения уравнения (7)2 10 С соизмеримо.й с периодом автоколебаний 9 в релейной системе стабШ1Изации 2. Тогда, положив все корни характеристического уравнения (8) равными величине l/tT , найдем по уравнениям (9)-(11) коэффициент модели движения плазменного шнура К -2,7540 , и коэффициенты модели во мущения ,21 10, Kj -0,735-1 Весовой коэффициент , в линейной комбинации (12) выбирается из уелоВИЙ получения максимальной частоты автоколебаний: jf, 2-10 с (2). Весовой коэффициент у находится из условия компенсации статической оши ки (16). При заданном ког ффициенте 0 усиления К 0,510 исполнительного устройства 3 весовой коэффициент i 2-10 . Экономический эффект предложенного способа обусловлен улучшением стабилизации оптимального (с точки зрения уменьшения энергетических потерь из плазмы) положения плазменного шнура в токамаке-реакторе, что приведетК уменьшению требуемой для зажигания мощности систем дополнительного нагрева плазмы. Экономический эффект количественно может быть определен после внедрения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации положения плазменного шнура в токамаке | 1985 |
|
SU1399824A1 |
| Устройство для стабилизации положения плазменного шнура в токамаке | 1986 |
|
SU1418817A1 |
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| СПОСОБ ИМПУЛЬСНОГО ЦИФРОВОГО КАСКАДНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАЗМЫ В D-ОБРАЗНОМ ТОКАМАКЕ | 2022 |
|
RU2788188C1 |
| СПОСОБ БЫСТРОДЕЙСТВУЮЩЕГО ОПРЕДЕЛЕНИЯ ФОРМЫ ПЛАЗМЫ В КАМЕРЕ ТОКАМАКА В ТЕЧЕНИЕ ДИВЕРТОРНОЙ ФАЗЫ ПЛАЗМЕННЫХ РАЗРЯДОВ | 2022 |
|
RU2787571C1 |
| Автоматическая система удержания плазменного шнура | 1977 |
|
SU670080A1 |
| Способ измерения параметров плазмы в токамаке | 1983 |
|
SU1150663A1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ В ПЛАЗМЕ ПРИ ПОПЕРЕЧНОМ ЗЕЕМАН-ЭФФЕКТЕ | 1989 |
|
SU1690531A1 |
| Способ измерения положения неустойчивой рациональной магнитной поверхности | 1984 |
|
SU1191945A1 |
| Способ измерения параметров плазмы в магнитном поле | 1982 |
|
SU1072635A1 |
е
| l.Fokunishi К., Saito S., Ogata А | |||
| , Hinomija Н | |||
| Egniliboixun: Plasma Position Control for a Large Tokamak Using Modern Control Theory, Japanese Journal of Applied Physics, vol 19, N 9, September, 1980, pp.1729-1736 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Грибов Ю.В,, Митришкин Ю.В., Чуянов В.А.Исследование системы управления равновесием плазмы в токамаке. | |||
| Препринт Института проблем управления | |||
| М., 1982 (прототип). | |||
