1
Изобретение относится к автоматическому управлению процессами в термоядерных установках и может быть использовано в системах управления равновесным положением плазменного шнура по большому радиусу в термоядерных установках типа токамак.
Цель изобретения - повьш ение точности стабилизации положения плазменного шнура в токамаке.
Способ заключается в том, что параметры модели движения плазменного шнура - коэффициент передачи или постоянная времени - автоматически подстраиваются к параметрам объекта - плазменному-шнуру в токамаке - в течение всего времени разряда. Это обеспечивает при формировании корректирующего сигнала более точную оценку неконтролируемого возмущения и, тем самым, более точную компенсацию возмущения. Увеличение точности компенсации возмущения приводит к дальнейшему уменьшению величины статической ошибки в смещении плазменного шнура.
Адаптивное приближение параметров модели движения плазменного шнура К Т„ к параметрам самого шнура К, Т приводит к минимизации динамической ошибки отслеживания модельными величинами смещения Х„ и возмущения WM измеряемой величины смещения X и неконтролируемой величины возмущения W
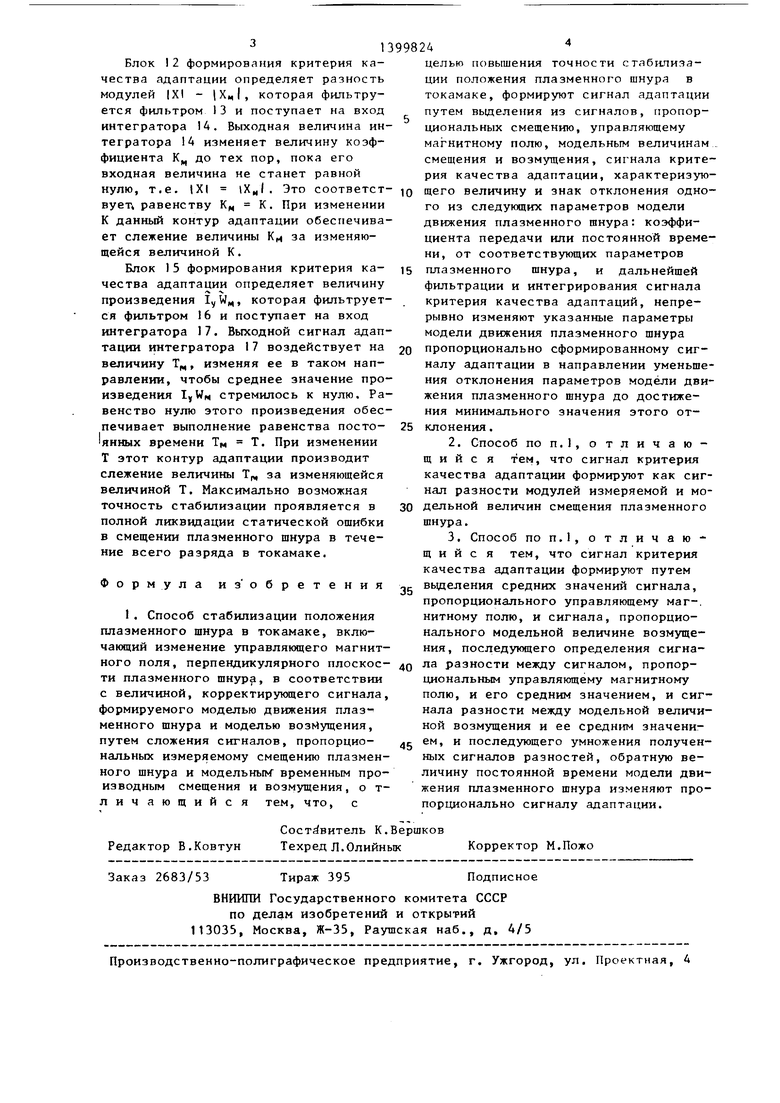
На чертеже представлена структур- ная схема устройства, реализующего способ стабилизации положения плазменного шнура в токамаке.
На объект 1 управления, представляющий собой плазменный шнур в токамаке, действует неконтролируемое возмущение 2, вызванное несовпадением магнитного поля, требуемого для обеспечения равновесия плазменного шнура и магнитного поля, создаваемого внеш
ними обмотками полоидальных полей. Управляющее поле, пропорциональное току в обмотке управления 1,, создает исполнительное устройство 3. Это устройство состоит из последовательного соединения обмотки А управления и преобразователя 5 корректирующего сигнала Z в напряжение на обмотке U. При создании больших мощностей преобразователь выполняется релейным и имеет высокий КПД. Смещение X и ток управления I, измеряют с помощью соответствующих измерительных блоков 6 и 7. Модельные величины смещения Х| и возмущения W и их временные
0
5
0
5
0
производные
dxy dw
формируют5
dt dt
ся моделью 8 движения плазменного щнура и моделью 9 возмущения. Блок 10 сравнения создает разностный сигнал путем сравнения величины измеряемого смещения X и его модельного значения Х. Выход блока 11 формирования корректирующего сигнала подкл1р- чен к входу исполнительного устройства 3.
Блок 12 формирования критерия качества адаптации для определения величины отклонения коэффициента К модели 8 от коэффициента К объекта 1 подключен двумя входами к выходам объекта X и модели движения плазменного шнура Х, а входом через фильтр 13 и интегратор 1А - к первому параметрическому входу модели 8. Блок
15формирования критерия качества адаптации для определения величины отклонения постоянной времени Т модели 8 от постоянной времени Т объекта 1 подключен двумя входами к выходу модели 9 возмущения W и измерителю тока 1у 7, а выходом через фильтр
16и интегратор 17 - к второму параметрическому входу модели 8.
Блок 12 формирования критерия качества адаптации определяет разность модулей 1X1 - |Хм1, которая фильтруется фильтром 13 и поступает на вход интегратора 14, Выходная величина интегратора 14 изменяет величину коэффициента Кц, до тех пор, пока его входная величина не станет равной нулю, т.е. |Х1 . Это соответст- вует равенству К К, При изменении К данный контур адаптации обеспечивает слежение величины К за изменяющейся величиной К.
Блок 15 формирования критерия ка- честна адаптации определяет величину произведения lyW,, которая фильтруется фильтром 16 и поступает на вход интегратора 17. Выходной сигнал адаптации интегратора 17 воздействует на величину Т„, изменяя ее в таком направлении, чтобы среднее значение произведения стремилось к нулю. Равенство нулю этого произведения обеспечивает выполнение равенства посто- янных времени Т, Т. При изменении Т этот контур адаптации производит слежение величины Т„ за изменяющейся величиной Т. Максимально возможная точность стабилизации проявляется в полной ликвидации статической ошибки в смещении плазменного шнура в течение всего разряда в токамаке.
Формула из обретения
1. Способ стабилизации положения плазменного шнура в токамаке, включающий изменение управляющего магнитного поля, перпендикулярного плоскости плазменного шнура, в соответствии с величиной, корректирующего сигнала, формируемого моделью движения плаз менного шнура и моделью возмущения, путем сложения сигналов, пропорциональных измеряемому смещению плазменного шнура и модельньп временным производным смещения и возмущения, о т- личающийся тем, что, с
5 5 0
5
0
5
целью повышения точности стабилизации положения плазменного шнура в токамаке, формируют сигнал адаптации путем вьделения из сигналов, пропорциональных смещению, управляющему магнитному полю, модельным величинам смещения и возмущения, сигнала критерия качества адаптации, характеризующего величину и знак отклонения одного из следующих параметров модели движения плазменного шнура: коэффициента передачи или постоянной времени, от соответствующих параметров плазменного шнура, и дальнейшей фильтрации и интегрирования сигнала критерия качества адаптации, непрерывно изменяют указанные параметры модели движения плазменного шнура пропорционально сформированному сигналу адаптации в направлении уменьшения отклонения параметров модели движения плазменного шнура до достижения минимального значения этого отклонения .
2.Способ ПОП.1, о тличаю- щ и и с я тем, что сигнал критерия качества адаптации формируют как сигнал разности модулей измеряемой и модельной величин смещения плазменного шнура.
3.Способ ПОП.1, отличаю- щ и и с я тем, что сигнал критерия качества адаптации формируют путем выделения средних значений сигнала, пропорционального управляющему маг-, нитному полю, и сигнала, пропорционального модельной величине возмущения, последующего определения сигнала разности между сигналом, пропорциональным управляющему магнитному полю, и его средним значением, и сигнала разности между модельной величиной возмущения и ее средним значением, и последующего умножения полученных сигналов разностей, обратную величину постоянной времени модели движения плазменного шнура изменяют пропорционально сигналу адаптации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации положения плазменного шнура в токамаке | 1983 |
|
SU1119490A1 |
| Устройство для стабилизации положения плазменного шнура в токамаке | 1986 |
|
SU1418817A1 |
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| Автоматическая система удержания плазменного шнура | 1977 |
|
SU670080A1 |
| Автоматическая система удержания плазменного шнура | 1979 |
|
SU782554A1 |
| СПОСОБ ИМПУЛЬСНОГО ЦИФРОВОГО КАСКАДНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАЗМЫ В D-ОБРАЗНОМ ТОКАМАКЕ | 2022 |
|
RU2788188C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Способ измерения параметров плазмы в токамаке | 1983 |
|
SU1150663A1 |
| Система автоматического магнитного управления положением, формой и током плазмы в токамаке с диверторной конфигурацией | 2023 |
|
RU2821007C1 |
Изобретение относится к автоматическому управлению процессами в термоядерных установках и может быть использовано в системах управления равновесным положением плазменного шнура по большому радиусу в установках типа токамак. Целью изобретения является повьш1ение точности стабилизации положения плазменного шнура в токамаке. На объект I управления, представляющий собой плазменный шнур в токамаке, действует неконтролируемое возмущение 2. Управляющее поле создает исполнительное устройство 3, состоящее из обмотки 4 управления и преобразователя 5 корректирующего сигнала в напряжение на этой обмотке. Смещение плазменного шнура и ток в обмотке управления измеряют с помощью измерительных блоков 6 и 7. Модельные величины смещения и возмущения и их временные производные формируются моделью 8 движения плазменного шнура и моделью 9 возмущения. Выход блока 11 формирования корректирующего сигнала подключен к входу исполнительного устройства 3. Благодаря использованию блоков адаптации 12-17 осуществляется подстройка параметров с $ (Л
| Грибов Ю.В | |||
| и др | |||
| Дииамика плазменного шнура и стабилизация его положения в токамаке с использованием аналоговых моделей | |||
| Водоподъемное устройство | 1926 |
|
SU4113A1 |
| М | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Способ стабилизации положения плазменного шнура в токамаке | 1983 |
|
SU1119490A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
