ИчоГфетоние слтиоситот к -штомпти- lecKONiy упр.чиленич) праг(ег(1.чми п термоядерных устлпопках и может исгюльэопано п качестве тлмкнутон систс мы автоматического управления рапнонегным положением плазменного шнура как по горизонтали, так и по вертикали п токамакях.
Целью изобретения является повы- шение точности стабилизации положения плазменного шнура.
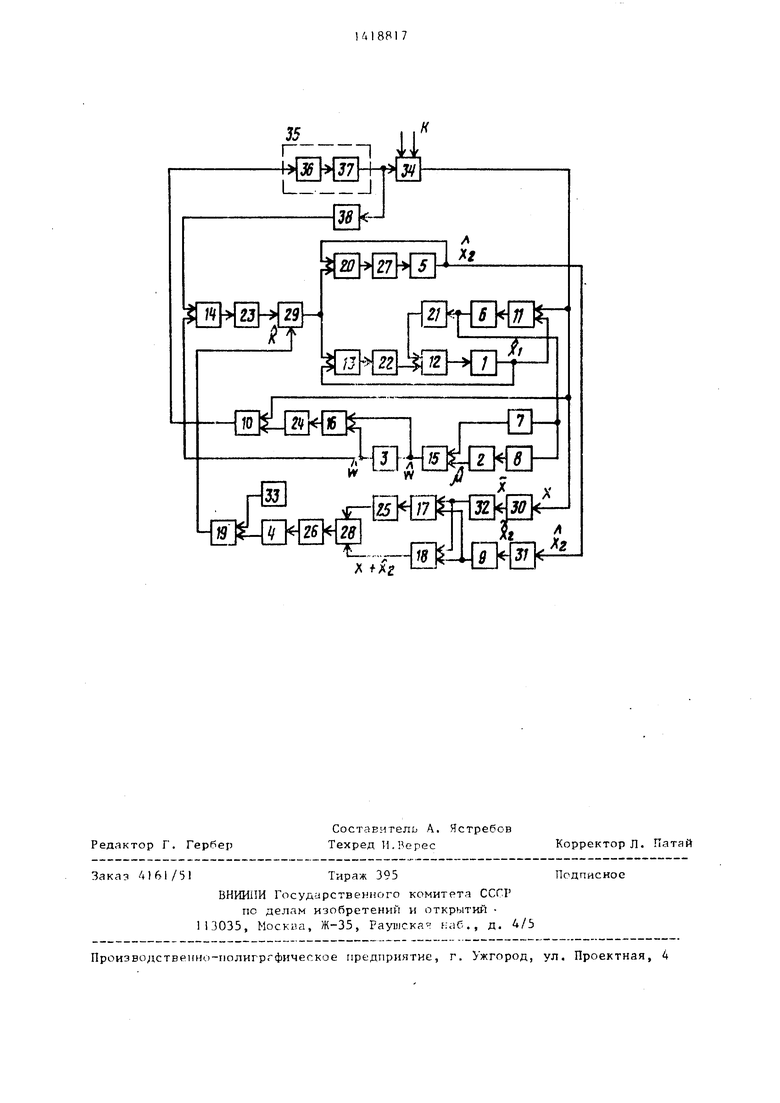
На чертеже представлена структурная схема устройства.
Устройство содержит первый 1, ото- рой 2, третий 3, четвертьп 4 и пятый 5 интеграторы} усилитель 6; первый 7, второй 8 и третий 9 масштабные усилители; первьй 10, второй 11, третий 12, четвертый 13, пятый 14, шестой 15, седьмой 16, восьмой 17, девятый 18, десятый 19 и одиннадцатый 20 сумматоры; первое 21, второе 22, третье 23, четвертое 24, пятое 25, шестое 26 седьмое 27 звенья с регулируемым коэф фициентом передачи; первое 28 и второе 29 множительные звенья; первый 30 и второй 31 фильтры высоких частот; фазовращатель 32, блок 33 задания начальных условий. Выходы сумматоров Ю и II подключены к выходу объекта 34, представляющего собой плазменный шнур в вакуумной камере. На объект действуют неконтролируемые возмущения: аддитивное Ы и параметрическое, из- меняющее коэффициент усиления К. Исполнительный орган 35, подключенный к входу объекта 34, состоит из последовательного соединения релейного преобразователя 36 аналогового сиг« нала Z в напряжение U прямоугольной формы и катутпки 37 управления. Вход датчика 38 тока подключен к катушке 37 управле)ия, а выход - к неинвертирующему входу сумматора 14. Вход исполните.1п.ног о органа 35 соединен с выходом сумматора 10.
Последовательно соединенные сум - маторы 12 и 13, интегратор 1 и звено 22 с регулируемым коэффициентом передачи образуют первьш внутренний контур отрицательной обратной связи, который совместно со звеном 23 с регулируемым коэффициентом передачи и множительным звеном 29 являются первой моделью объекта. Интегратор 1, сумматор 11 и 12, усилитель 6 и зярно 21 с регулируемым коэффициентом передачи образуют птос
Q
f 0 5 о Q
0
5
рой внутренний Контур с огрицатель- ной обратной свнз)1о - кошур оценки врлхода об1-,екта. Интегр.чторы 2 и 3, сумматор 15 и масштабные усилители 7 и 8, входы которых подключе- иы к выходу усилителя 6, представляют собой модель возмущения, выход которой (выход интегратора З) подключен к инвертирующему входу сумматора 16. Последовательно соединенные первая модель объекта, модель возмущения, сумматоры 11 и 14 и уси штель 6 образуют третий внутренний контур отрицательной обратной связи. Последовательно соединен- Hiiie cyhiMarop 20, звено 27 с регулируемым коэффициентом передачи и интегратор 5 создают четвертый внутренний контур отрицательной обратной связи, который совместно со звеном 23 с регулируемьм коэф4)ициентом передачи и множительным звеном 29 являются второй моделью объекта. Этот контур обратной связи, подключенньй lepe i фильтр 30 высоких частот, фазовращатель 32, сумматор 17, звено 25 с регулируемым коэффициентом передачи к входу множительного звена 28, а также подключенное к другому .входу множительного звена 28 последовательное соединение сумматора 18, масштабного усилителя 9, фильтра 31 высоких частот, соед1 ненного своим входом с вьЕходом объекта 34, представляют собой совместно с последовательным соединением звена 26 с регулируемым коэффициентом передачи, интегратором 4, сумматором 19, множительным звеном 29 и блоком 33 за- да}1ия начальных условий внешьпою цепь автоматической подстройки коэффициента усиления двух моделей объекта к коэффициенту усиления объекта 34. Последовательное соединение исполнительного органа 35, объекта 34 и cyNfMaTopa 10 является ос- HOBHbw контуром стабилизации положения плазмс-нног о шнура в токамаке.
Устройство работает следующим образом.
Уравнение двшкения объекта 34 - плазменного щнура с учетом вакуумной камеры - можно представить в
виде
Тх 4 X K(t) l(t) + w(t)J, d)
где X - смещение плазменного шнура
относительно требуемого значения большого радиуса;
3141
X - производная смещения плазменного ганура;
I - ток в кату1пке 37 управления Т - постоянная времени объекта; К - коэффициент усиления объекта, обратно пропорциональный току плазмы; Ы - аддитивное неконтролируемое возмущение.
Уравнение динамики второй модели бъекта имеет вид:
Т,х, , K(t)T(t) 4 (t), (2)
л
де X. - выходная величина второй
модели объекта (выход инте- гратора 5);
Xj - производная выходной величины второй модели объекта; U) - оценка возмущения; Ы - (выход интегратора З),
получаемая с помощью первой модели объекта и моде- . ли возмущения;
ос
Т. - оценочное значение посто- 25 янной времени объекта Т
881
10
15
20
второй модели, задаваемое звеном 27 с регулируемым коэффициентом передал
K(t) - коэффициент усиления второй модели объекта (выход
сумматора 19).
Этот коэффициент изменяется цепью автоматической подстройки с помощью множительного эвена 29, один из входов которого подключен к выходу сумматора 19. Уравнение динамики K(t) задается интегратором 4 с нулевыми начальными условиями:
К (х - 1, §,0, (3)
л
где К - производная коэффициента усиления второй модели объекта - общий кoэф(ициeнт усиления
цепи подстройки.
Начальные условия К(0) задаются блоком 33 задания начальных условий, подключенного к входу сумматора 19.
Если положить в (2) Tj Т; Л W, то работу цепи подстройки можно объяснить так. Пусть К 7 К, тогда х 7Х
л.А
ИХ - X 2 ;0 В этом случае величина К будет уменьшаться, так как согласно (3) . Пусть К К. тогда X - и скорость К 70; К возрастает. В обоих случаях величина К приближается к К: коэффициент усиления
7
модели К отслеживает коэффипиент yci. ления объекта К.
Величина ошибки оценки воямущенин )) тем большем, чем больше отклонение К от К. Это следует из уравнений динамики объекта (), первой модели объекта и модели возмущения:
Г x).K(OCr(t)-a.a),(.,
/
и
Л Р
Л
где X
л X
Л
р К(у. - х); Кз(х - х),
выходная величина первой модели объекта (выход интегратора 1 );
производная выходной величины первой модели объекта; вспомогательная переменная модели возмущения (выход интегратора 2);
5
0
5
0
К,, К
Kj7 О
г
л
т.
и; - л
I коэффициенты усиления внутренних контуров отрицательной обратной СВЯЗИ , оценочное значение постоянной времени объекта Т первой модели, задаваемое звеном 22 с регулируемым коэффициентом передачи; производная оценки возмущения ;
производная вспомогательной переменной модели возмущения .
Поскольку множительное звено 29 входит как во вторую, так и в первую модель объекта, то изменение его входа К в соответствии с (З) и, непрерывное приближение К к величи- 5 не коэффициента усиления объекта К обеспечивает более точную оценку возмущения cJ в (4) при Т Т, т.е. уменьшение величины Р этом более точным получается сигнал обратной связи Z, в котором используются выходт1 е величины модели возмущения Ы и Л i
0
fj- LJ + / с
-(т-1ч:-
Kj, Т| - коэффициент передачи и постоянная времени катушки управления.
514
Увеличение точности формиров иия сиг- налл 7, пс1вьш1пет точность компенсации возмущения в соответствии с (5) в ос.(5бенности на стадии ввода тоКеТ плазм1.г, когда K(t) в (1) изменяется значительно.
Поясним теперь, каким образом полу2
2
- ; в
чается разность квадратов х цепи гтодстройки, а также назначение фильтров верхних частот и фазовращателя .
Разность квадратов в (З) создается cyNtMaropaMH 17 и 18 и множительным звеном 28. На выходе сумматора 17 име ется разность х - х , на выходе сумматора 18 сумма X X,, }ia выходе множительного звена - величина, пропорциональная произведению (х+ y. х(х - й) разности квадратов X. . При этом разность х - х-j дополнительно усиливл.отся звеном 25 с регулируемым коп()х|)цциентом передачи.
Если же непосредстве нно возводить в квадрпт аналоговыми множителыйгми звеньями сигналы х и Xj для получения разности ,то при малом рассогласовании между эТ1-1Ми сигналами получить знак X практически невоз- модно из-за Нелинейности множителт - ных звеньев. Кроме того, существенную погрешность при малых рассогласованиях вносит и дрейф нуля м}{ожителъ-- ных . Опред|;ление же разности
1 2 .
квадратов х - к, с использованием произведении разности х - -г и суммы X + х свободно от этих педос . -ат- ков, так кмк каждьш из сомножителей можно предварителъяо усилить до необходимого уровня и повысить точность
) л 1 получения р-п пс ги х - х.
Ошибка опег:ки возмущения E(jj :уо-U) присутстпует в выходном сигнале второй модели, что следует из (2)
у. Х.1- К(1 - U) ) К(-Е) .
Эта ошибк.) nHiicuT погрешность при настройке ( коэф(})ициента усиления моделей К, что в некоторых случаях может Г1):ивести к неустойчивости совместной .оты двух моделей. Этот недостаток позволяют ликвидировать фильтры 30 и 31 высоких частот следующим обратом.
В замкнулых релейных автоколебательных системах стабилизации положения плачме1П1ого шнура токамаков характерное, лремя изменения неконтролируемых неличин CJ и К много больше
88176
периода автоколебаний. Поэтому фильтрами 30 и 31 верхних частот можно подавить низкочастотные составляю- щие в выходных сигналах объекта х и второй модели Xj, вызванные изменениями возмущения ы . Частота среза фильтров выбирается меньше частоты автоколебаний релейной системы ста10 билизации, но больше характерных частот изменения CJ. При этом ток управления и смещения плазменного шнура можно представить в виде
Л Я /С
I I + I,X-X + x , Xj Xj+Xj,
(6)
где f, f,
5ci - осциллирующие части тока, смещения и оценки смещения второй модели,
Т, х,
Л
Х-,
15
20
- медленно ме 1яющився составляющие тока, смещения и оценки смещения.
„с Подставляя(6) в (1), (2) и применяя разделение движений, получим уравнения для быстрых и медленных составляющих:
15 X КТ, + -2 1
30 я д
где Xj и X - производные осциллирующих частей оценки смещения второй модели и самого смещения.
35
X К(1 + , xi K(I-+ w) .
На выходе фильтров 30 и 31 выделяются осциллирующие величины соответственно X и Х2, которые, как вид- 0 но из (7), определяются только переf
менпой составляющей тока I, одинаковой для объекта ,()и второй модели (2), параметрами объекта Т, К и молл
дели, Tj, К и не зависят от и) , w
5 и EL.
Фазовращатель 32 в канале х, а также масштабный усилитель 9 в канале х i цепи настройки необходимы для устранения погрешностей неидентич0 ности фильтров 30 и 31 верхних частот данных каналов,
/изтог атическая подстройка коэффициента К Г одели к изменяющемуся в течение разряда коэффициенту К объекта
5 позволяет более точно оценивать изменяющуюся величину возмущения (j . Увеличение точности подстройки величины ш, использующейся при формировании сигнала обратной связи (5),
/
1гривпдит к yiu- . iiru HUH 1очн ч ти с.та- билизапии положения II.п,. 1т(1 проявляется в лнквиД Шнн .тгической ошибки не только на кначистационар- ной стадии разряда, но и на стадии ввода тока .
Фоомула изобретени Устройство для стабилизации положения плазменного шнура в токамаке, содержащее ис1юлн 1тельный орган, выход которого подключен к входу объекта управления и входу датчика тока, первый сумматор, выход которого соединен с входом исполнительного органа, а первый инпертиругощий вход с выходом объекта управления и с инвертирующим входом второго сумматора, неинвертирующий вход которого соединен с выходом первого интегратора, а выход второго сумматора через последовательно соединенные усилитель и первое звено с регулируемым коэффициентом передачи - с первым неинвертирующим входом третьего сумматора, выход которого подключен к входу первого интегратора, выход первого интегратора соединен с неинвертирующим входом четвертого сумматора, выход которого через второе звено с регулируемьм коэффициентом передачи соединен с вторым неинвертирующим входом третьего сумматора,выход датчика тока подключен к неинвертирующему входу пятого сумматора, выход которого соединен с входом третьего звена с регулируемым коэффициентом передачи, выход усилителя через первый масштабный усилитель соединен с инвертирующим входом шестого сумматора, а через второй масштабный усилитель - с входом второго интегратора, выход которого подключен к неинвертирующему входу шестого сумматора, выход шестого сумматора соединен с неинвертирующим входом седьмого сумматора и входом третьего интегратора, выход которого подключен к инвертирующим входам пятого и сед |мого сумматороров, выход седьмого сумматора через четвертое зве178
с рсм улируем - - коэффи 1,иен-11 м пе- редлчи сс единен с вторым иивертир 1о- щим входом- первого сумматора, отличающееся тем, что, с це-
лью гюпьппения точности стабилизации
положения плазменного шнура, в него введены последовательно соедичег1т,1е первый фильтр верхних частот и фляовращатель, последовательно соединен- mie второй фильтр верхних частот и третий масштабШзпЧ усилитель, восьмой, девятый и десятый сумматоры, пятое звеное с регулируем1 1м коэффициентом
передачи, последовательно соединенные первое множительное звено, шестое звено с регулируемым коэ( циентом передачи и четверть интегратор, блок задания начальных услоВИЙ, второе множительное звено и последовательно соединенные одиннадцатый сумматор, седьмое звено с регулируемым коэффициентом передачи и пятый интегратор, причем вход первого
фильтра верхних частот подклк чен к выходу объекта управления, выход фазовращателя соединен с неинвертирующим входом восьмого и первым неинвертирующим входом девятого сумматоров,
выход третьего масштабтю о усилителя - с инвертирующим входом восьмого и вторым неинвертирующим входом девятого сумматоров, выход восьмого сумматора через пятое звено с регулируемым
коэффициентом передачи соединен с первым входом первого множительного звена, второй вход которого подключен к выходу девятого сумматора, выходы блока задания начальных условий и четвертого интегратора подключены к соответствующим неинвертирующим входам десятого сумматора, выход которого подключен к первому входу второго множительного звена, второй вход второго
множительного звена соединен с выходом третьего звена с регулируемым коэффициентом передачи, а выход - с инвертирующими входами четвертого и одиннадцатого сумматоров, выход пятого интегратора соединен с неинверти- руюшим входом одиннадцатого cy мaтo- ра и входом второго фильтра верхних частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации положения плазменного шнура в токамаке | 1985 |
|
SU1399824A1 |
| Способ стабилизации положения плазменного шнура в токамаке | 1983 |
|
SU1119490A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Регулятор для объектов с запаздыванием | 1986 |
|
SU1361503A1 |
| Система автоматического управления процессом сварки | 1984 |
|
SU1192920A2 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
Изобретение относится к автомати ческому управлению процессами в термоядерных установках и может найти применение в качестве замкнутой системы автоматического управления равновесным положением плазменного шнура в токамаках как по горизонтали, так и по вертикали. Целью изобретения является повьш1ение точности стабилизации положения плазменного шнура. В устройстве с помощью комбинаций из сумматоров, интеграторов, масштабных усилителей, звеньев с регулируемым коэффициентом передачи, фильтров верхних частот, фазовращателя и множительньпс звеньев созданы первая модель объекта, контур оценки выхода объекта, модель возмущения и вторая модель объекта. При работе замкнутой релейной системы управления в автоколебательном режиме определяется разность между квадратами переменных составляющих величин смещения и его модельным значением. Эта разность, пропорциональная разности коэффициентов усиления объекта и модели, используется для непрерьганого приближения коэффициента усиления модели к коэффициенту усиления объекта. В результате этого слежения происходит более точная оценка неконтролируемого возмущения и повышается точность его компенсации. 1 ил. (Л
| Грибов Ю.В., Митришкин Ю.В., Чуянов В.А | |||
| Исследование системы управления равновесием плазмы в то- камаке | |||
| Препринт Института проблем управления.-М., 1982 | |||
| Авторское свидетельство СССР 1153698, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
