1 . Изобретение относится к электротехнике и может быть использовано для измерения мгновенной частоты вр щения (качаний) ротора синхронного гистерезисного электродвигателя. Известно устройство для измерени и осциллографирования угла качаний синхронной электрической машины, со держащее датчик положения ротора, тактовый генератор, связанный с напряжением сети, триггер, входы кото рого соединены с упомянутым датчико положения и тактовым генератором, а вход подключен к блоку регистрации качаний l . Однако при использовании этого устройства для регистрации качаний синхронных гистерезисных электродви гателей, имеющих произвольный угол синхронизации положения точки ротора относительно напряжения сети, не возможно проводить точные измерения и исследования. Наиболее близким техническим решением к изобретению является устройство для измерения мгновенной частоты вращения ротора гистерезисного электродвигателя, содержащее импульсный датчик положения ротора гистерезисного электродвигателя, по следовательно соединенные задающий генератор, согласующий делитель час тоты, фазорасщепитель, усилитель мо ности, предназначенный . для подключения к гистерезисному электродвигателю, RS -триггер, первый вход ко торого через первьй делитель частоты с коэффициентом деления К связан с выходом согласующего делителя час тоты, второй вход R5 -триггера под ключен к выходу датчика положения ротора, а выход 85 -триггера - к блоку измерения мгновенной частоты вращения, блок взаимного регулирова ния импульсов датчика положения ротора и синхронизирующего импульса согласующего делителя частоты. При этом блок взаимного регулирования импульсов датчика положения и синхронизирующего импульса первого делителя частоты содержит селектор импульсов, блок формирования сигнала управления, блок добавления или вычитания импульса. Известное устройство решает зада чу измерения мгновенной частоты вра щения ротора и регистрации превышения ее нестабильности наперед заданного допустимого уровня 2. 43J Однако оно не позволяет измерять мгновенную частоту вращения ротора внутри заданного диапазона, а также исследовать динамику ее изменения, что необходимо при изучении . причин возникновения нестабильности мгновенной частоты вращения и обработке средств демпфирования. Цель изобретения - повышение точности измерения мгновенной частоты вращения ротора во всем диапазоне ее изменения. Поставленная цель достигается тем, что в устройстве для измерения мгновенной частоты вращения ротора гистерезисного электродвигателя, содержащем импульсный датчик положения ротора гистерезисного электродвигателя, последовательно соединенные задающий генератор, согласующий делитель частоты, фазорасщепитель, усилитель мощности, предназначенный для подключения к гистерезисному электродвигателю, R5 -триггер, первый вход которого через первый делитель частоты с коэф4)ициентом деления N связан с выходом согласующего делителя частоты, второй БxoдR5триггера подключен к выходу датчика положения ротора,, а выход R5 -триггера - к блоку регистрации изменения мгновенной частоты вращения, блок взаимного регулирования импульсов датчика положения ротора и синхронизирующего импульса согласующего делителя частоты, в последний введены формирователь корректирующего импульса, два логических элемента И, два блока переключения, второй делитель частоты с коэффициентом делеНИН М , причем входы первого блока переключения соединены с формирователем корректирующего импульса и с датчиком положения ротора соответственно, а выход первого блока переключейия подключен к первому входу второго логического элемента И, второй вход которого соединен с выходом согласующего делителя частоты, а выход логического элемента И подключен через второй делитель частоты с коэффициентом деления М к первому входу второго блока переключения, второй вход которого соединен с формирователем корректирующего 1гмпульса, а выход второго блока переключения - с первым входом первого логического элемента И, второй вход которого соединен с выходом согласу3
ИЩего делителя частоты, а выход первого логического элемента И связан с входом первого делителя частоты с коэффициентом деления N .
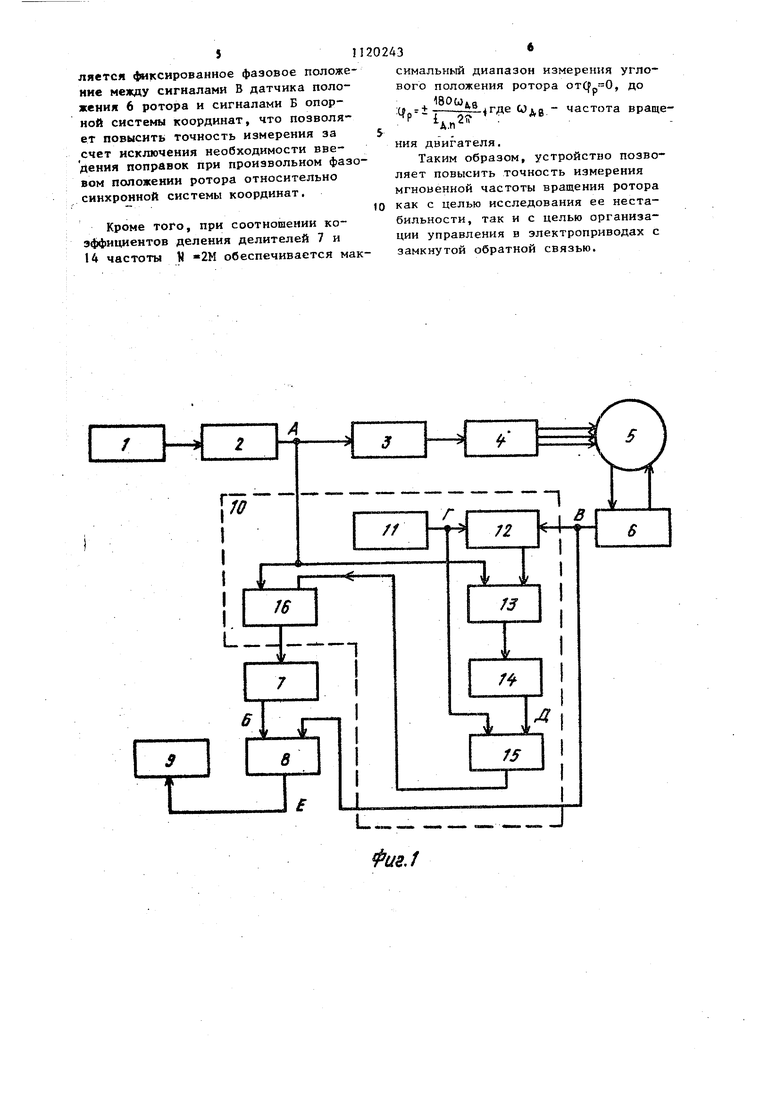
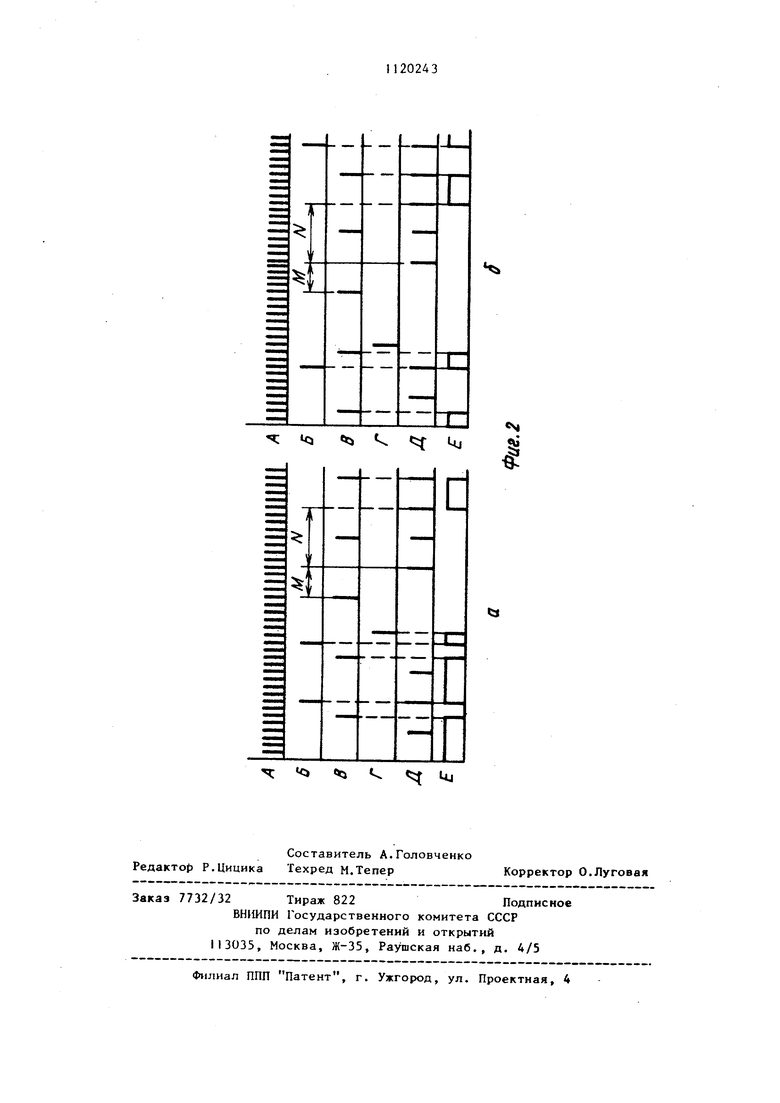
На фиг.1 показана принципиальная схема устройства для измерения мгновенной частоты вращения ротора гистерезисного электродвигателя; на фиг.2 - временные диаграммы, поясняющие работу устройства, при , и М 4 для различных начальных фазовых положений сигналов с делителя частоты и датчика положения ротора
Устройство для регистрации качаний ротора синхронного гистерезисного электродвигателя (фиг.1) содержит последовательно соединенные задающий генератор 1, согласующий делитель 2 частоты, фазовращатель 3, усилитель 4 мощности, подключенный к синхронному гистерезисному электродвигателю 5, на валу которого установлен импульсный датчик 6 положения его ротора. Устройство содержит первый делитель 7 частоты с коэффициентом , деления N и KS -триггер 8, первый вход которого через первый делитель 7 частоты связан с выходом согласующего делителя 2 частоты. Второй вход R5-триггера 8 подключен к выходу датчика 6 положения ротора гистерезисного электродвигателя, а выход R5 -триггера - к блоку 9 регистрации изменения мгновенной частоты вращения .
Для обеспечения постоянного взаимного начального фазового положения сигналов датчика 6 положения ротора и первого делителя 7 частоты с коэффициентом деления N в устройство введен блок 0 взаимного регулирования импульсов датчика 6 положения и синхронизирующего импульса согласующего делителя 2 частоты. В последний введены формирователь 11 корректирующего импульса, к выходу которого подключен первый блок 12 переключения, второй вход которого соединен с выходом датчика 6 положения. К выходу первого блока 12 переключения подключен первый вход второго логического элемента И 13, второй вход которого соединен с выходом согласующего делителя 2 частоты. К выходу второго логического элемента И 3 подключен вход второго делителя I4 частоты с коэффициентом деления М, выход которого подключен к
0243
первому входу второго блока 15 пере- ключения, второй вход которого соединен с выходом формирователя 1I корректирующего импульса. Выход вто
5 рого блока I5 переключения соединен с вторым входом первого логического элемента И 16, первЕ гй вход которого соединен с выходом согласующего делителя 2 частоты.
O Устройство работает следующим образом.
На вход первого делителя 7. частоты с коэффициентом деления N поступает через первый логический элемент
5 И 16 сигнал А с согласующего делителя 2 частоты (фиг.2), с выхода первого делителя 7 частоты с коэффициентом деления U - сигнал Б, частота которого i N подается на первый
Q вход R5 -триггера 8, на второй вход которого подается сигнал В с датчика положения ротора, частота которого равна
.n.
5 После подачи корректирующего импульса Г .блоки переключения 12 и 15 выдают сигнал логического О на логические элементы И 16 и 13 и тем самым закрывгшт делители 7 и I4 частоты. После прихода первого во времени за корректирующим импульсом сигнала В с датчика 6 положения ротора блок 12 переключения выдает сигнал логической 1 и через второй логический элемент И 13 открыва5 ет второй делитель 14 частоты с коэффициентом деления М . Через М импульсов делитель 14 частоты выдает сигнал на изменение состояния второго блока 15 переключения, выходной сигнал которого через первый логический элемент И 16 открывает первый делитель 7 частоты с коэффициентом деления М , Через N импульсов первый делитель 7 частоты
5 выдает сигнал на триггер 8, устанавливая его по выходу в положение логической 1, и задавая тем самым нйчальную точку отсчета. Следующий затем сигнал с датчика 6 положения
0 возвращает триггер 8 в нулевое состояние. По изменению скважности сигнала Е на выходе триггера 8 судят об изменении мгновенной частоты вращения ротора.
5 Работоспособность устройства обес печивается при соотношении коэффициентов деления делителей 7 и 14 частоты. При этом автоматически выстав ляется фиксированное фазовое положе ние между сигналами В датчика положения 6 ротора и сигналами Б опорной системы координат, что позволяет повысить точность измерения за счет исключения необходимости введения поправок при произвольном фаз вом положении ротора относительно синхронной системы координат. Кроме того, при соотношении коэффициентов деления делителей 7 и 14 частоты Ч 2м обеспечивается ма симальиый диапазон измерения углового положения ротора OTCfp-O, до :( СОде,- частота вращения двигателя. Таким образом, устройство позволяет повысить точность измерения мгновенной частоты вращения ротора как с целью исследования ее нестабильности, так и с целью организации управления в электроприводах с замкнутой обратной связью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ синхронизации группы гистерезисных двигателей | 1984 |
|
SU1241390A1 |
| Способ контроля входа в синхронизм гистерезисного электродвигателя | 1983 |
|
SU1162013A1 |
| Устройство для измерения скорости нарастания давления в цилиндре поршневого двигателя | 1981 |
|
SU1000809A1 |
| Синхронизированный вентильный электродвигатель | 1984 |
|
SU1251279A1 |
| Устройство измерения неравномерности мгновенной частоты вращения вала | 2018 |
|
RU2703274C1 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Ротационный электровискозиметр | 1984 |
|
SU1276957A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ДИЗЕЛЯ | 2007 |
|
RU2344386C1 |
| Способ стабилизации мгновенной частоты вращения ротора гистерезисного электродвигателя | 1982 |
|
SU1164850A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МПЮВЕННОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА гаСТЕРЕЗИСНОГО ЭЛЕКТРОДВИГАТЕЛЯ, содержащее импульсный датчик положения ротора гистерезисного электродвигателя, последовательно соединенные задающий генератор, согласующий делитель частоты, фазорасщепитель, усилитель мощности, предназначенный для подключения к гистерезисному электродвигателю, К5 триггер, первый вход которого через первый делитель частоты с коэффициентом деления N связан с выходом согласующего делителя частоты, второй вход Я5-триггера подключен к выходу датчика положения ротора, а выход Й5триггера - к блоку регистрации изменения мгновенной частоты вращения. блок взаимного регулирования импульсов датчика положения ротора и син- . хрониэирующего импульса согласующего делителя частоты, отличающееся тем, что, с целью повышения точности, в блок взаимного регулирования импульсов датчика положения ротора и синхронизирующего импульса согласующего делителя частоты введены формирователь корректирующего импульса, два логических элемента И, два блока переключения, второй делитель частоты с коэффициентом деления М , причем входы первого блока переключения соединены с г Л формирователем корректирующего импульса и с датчиком положения ротора соответственно, а выход первого блока переключения подключен к первому входу второго логического элемента И, второй вход которого соединен с выходом согласующего делителя частоты, а выход логического элемента И подключен через второй делитель частоты с коэффициентом деления М к первому входу второго блока переключения, второй вход которого соединен с формирователем корректирующего импульса, а выход второго блока переключения - с первым входом первого логического элемента И, второй вход которого соединен с выходом согласующего делителя частоты, а выход первого логического элемента И связан с входом первого делителя частоты с коэффициентом деления N .
Фив,1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бобров И.И., Зисман Л.М | |||
| Устройство для измерения и осциллографирования угла выбега синхронного генератора.- Электричество, 1962, № 6 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
