/у/7 /// ////// W W
.-Н
Фиъ. / //////
Изобретение относится к устройстВ.ам возбуждения сейсмических си1-налоБ в грунте при проведении сейсморазведочных работ, а ш 1енно к источникам сейсмических сигналов, используем-ых для поиска нефти и гаэа„
Известен источник для возбуждения сейсмических волн, включающий опорную плиту, исполнительный механизм, тягач, прицеп, механизм подъемаопускания опорной плиты и устройство подъема-опускания прицепа
Источник работает следующим обраэом„ Опорная плита в транспортном положении и при переездах с одной физической точки на другую зафиксирована от рассоединения при помощи заглушек и шплинтов в серьгах шарнирного устройства механизма подъема опускания опорной плиты. На физкч:еской точке опорная плита с исполнительньда механизмом расфиксируется к опускается на грунт механизмом подъема-опускания опорной плиты. Производится нагружение опорной плиты ч:есть массы прицепа устройством подъемаопускания прицепа,,
После проведения сеанса развертки устройство подъема-опускиния прицепа no.uHHiviaeT прицап, а мехаьшзм подъема-опускания опорной плиты под/ нима.ет опорную плиту, которая фнкси-руется при помощи заглушек и игплинтов, Источ-ник переезжает на другую физичecкsw) точку, и процесс позгоряется ij ,
Недостатками данного источника являются сложность конструкции устройств подъема-опускс1ккя спорг-ой плиты и прицепа; сложная гидравлическая система устройств под7 ема-опускани.г-;,. сложная система фиксации опорной плиты, производимая вручную при ка:.едом переезде с одной ф-изической точки на другую.,
Наиболее близким технич;ес.. oeoie нием к изобретению является источник сейсмических сихналов,. содержайгяй опорную плиту, установленный кз ней исполнительный механизм, иилкнд эы подъема-опускания, устройство либроизоляции, тягач и прицеп, включающий нижнюю и верхнюю paj-iK, шарнирко соедненную по концам с тягачом и нижней рамой,, которая згццним концом св.язана с осью прицепа, а персдншл - с верхней РШ-10Й посредством цнлиндра подъе ма-опускания.
На нижней раме имеются две вилки с гидроприводом (задняя и передняя) для крепления исполнительного механизма с опорной плитой в рабочем и транспортном положениях, В транспорт ном положении исполнительный ме.ха низм с опорной плитой крепится шар™ нирно на задней вилке, расположенной позади колес прицепа,
В рабочем положении исполнительный механизм с опорной плитой крепит СИ на передней вилке, расположенной между передней и задней осями тягача к прицепа о
Перевод источника из транспортного полокения в рабочее осуществляется следующим образом„ Вилка заднего крепления исполнительного механизма с опорной плитой опускает его на irpyhT и рассоединяется с ниМо Затем тягач с прицепом разворачивается таким образом, что передняя сторона прицепа, в которой расположена передняя вилка,- оказывается в результате такого маневра над расположенным, на грунте исполнительным механизмом с опорной плитой. Затем производится соединение вилки с исполнмтельньш механизмом, подъем ег-о с грунта и .переезд на физическую точку
Установка исполнительного механизма с опорной плитой на грунт осуществляется в два этапа. Первый этап опускание исполнительного механизма с опо ;Ной плитой на грунт, второй эта.п -- нЕ.гружение опорной плиты частью массы прицепа,
Далее производится сеанс развертки, и опорная плита с исполнительнымж--чанкзкок ггоднимается также в д.ва этапа,; Фиксация осуществляете; при помощи заглушек и цтплинтов f 2j,
Однако известный источник имеет большую металлоемкость и сложен по ко НС тру к ЦК}., что обусловлено наличием дву.1 устройств подъема и опускан 5я опорной плиты, а т$.кже устройст:;а подъйма-опуска.;кя нижней прицепа, сложностью гигфавлической CKcrejvsb устройств подъема-опускания нижней ргг.ъ1 прицепа, сложностью гидравлической системы устройств подъема-опускания, состоящей, из большого :исла гидроаппаратуры к гидроцилиндров, кроме хоАо, не обеспечивается фиксация опорной п.литы от раскачиваiHH iipK движении,
Це.ть изобретения - упрощение конс:;рукции«
Поставленная цель достигаехсл leMj. что источник сейсмических сигналов., содержшдий опорную плиту, установленный н.д ней исполнит€;льнг.лй механизм, цилиндры подъема-опускания устройство виброизоляции, тягач и прицеп, включающий нижнюю и верхнюю peLMH., шарннрно соединенную по концам с тягачок и нижней рамой которая эал-п- м концом связана с осью прицепа а передни , концом - с верхней рамой .;юсредстЕон цилиндра подъема-опускания, снабжен пов.оротньши кронштейнами,, соединенными осями с нижней рамой, гибкими связями, соединяющими исполмк-еельный механизм с верхней pajv ofi и уп.ор.ами; устанокл8н ым.и на ч;ц}дзей раке, устройетйо эиброизоляции расположено между опорной плитой и поворотными кронштейнами, оси которых расположены над упорами и центрами тяжести исполнительного механизма -и опорной плиты и под точками закрепления гибких связей.
Гибкие связки выполнены в виде тросов,
Гибкие связи выполнены в виде цепной передачи.
Гибкие связи выполнены в виде системы пружин растяжения или сжатия.
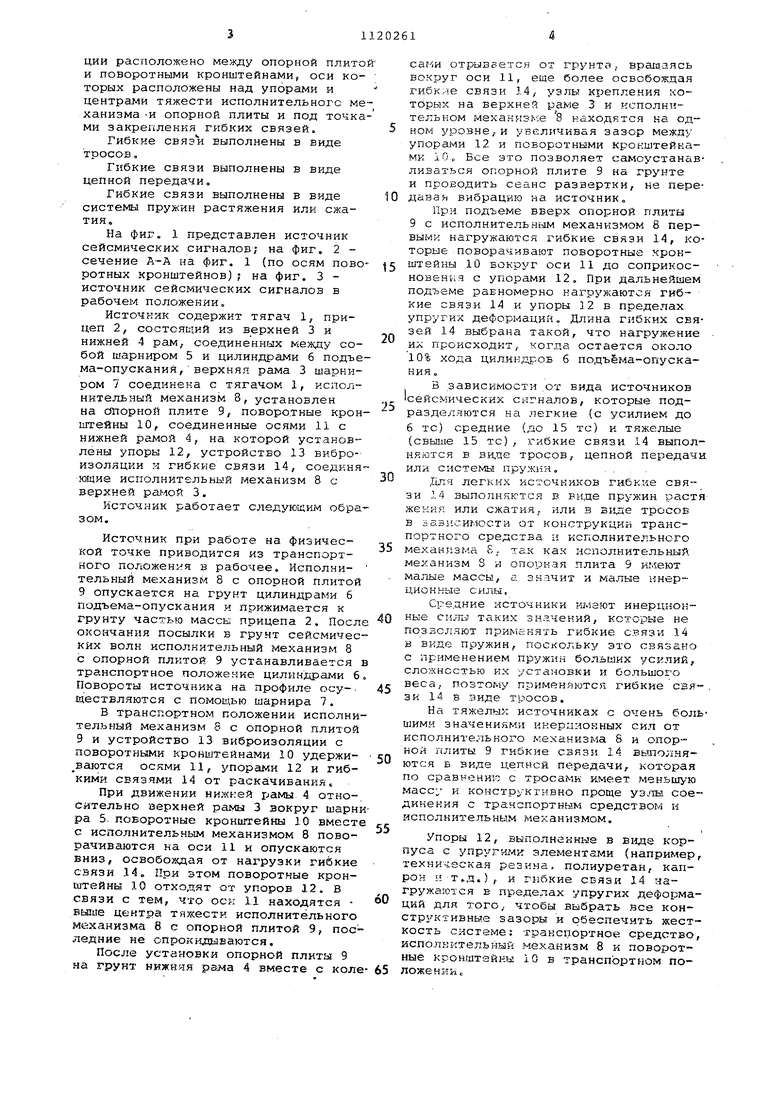
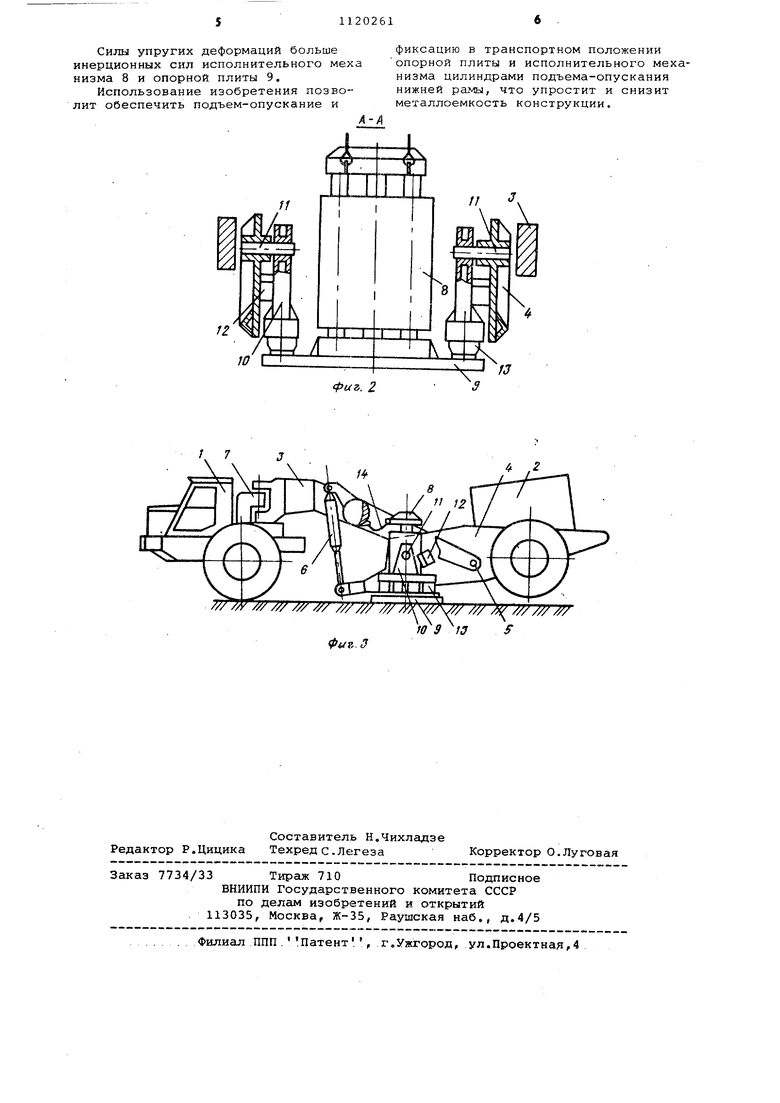
На фиг о 1 представлен источник сейсмических сигналов; на фиг. 2 сечение А-А на фиг. 1 {по осям поворотных кронштейнов) на фиг. 3 источник сейсмических сигналов в рабочем положении
Источник содержит тягач 1, прицеп 2, состоящий из верхней 3 и нижней 4 рам, соединенных между собой шарниром 5 и цилиндрами б подъема-опускания, верхняя рама 3 шарниDOM 7 соединена с тягачом 1, исполнительный механизм 8, установлен на сшорной плите 9, поворо.тные кронштейны 10, соединенные осями 11 с нижней рамой 4, на которой установлены упоры 12, устройство 13 виброизоляции и гибкие связи 14, соединяющие исполнительный механизм 8 с верхней рамой 3.
Источник работает следующим образом.
Источник при работе на физической точке приводится из транспортного положен1- я в рабочее. Исполнительный мб1ханизм 8 с опорной плитой 9 опускается на грунт цилиндрами б подъема-опускания и прижимается к грунту частг..га массы прицепа 2. После окончания посылки в грунт сейсмических волн исполнительный механизм 8 с опорной плитой 9 устанавливается в транспортное положение цилиндрами 6 Повороты источника на профиле осу-, ществляются с помощью шарнира 7.
В транспортном положении исполнительный механизм 8 с опорной плитой 9 и устройство 13 виброизоляции с поворотными кронштейнами 10 удержи ваются осями 11, упорами 12 и гибкими связями 14 от раскачивания с
При движении нижней рамы 4 отно-. сительно верхней рамы 3 вокруг шарнира 5. поЕорогные кронштейны 10 вместе с исполнительным механизмом 8 поворачиваются на оси II и опускаются вниз, освобождая от нагрузки гибкие связи 14„ При этом поворотные кронцгтейны 10 отходят от упоров 12. В связи с тем, что оси II находятся вшие центра тяжести исполнительного механизма 8 с опорной плитой 9, последние не oпpO Ciiдывaютcя.
После установки опорной плиты 9 на грунт нижняя рама 4 вместе с колесаг;и отрывБвтся от грунта, вращаясь вокруг оси 11, еще более освобождая гибкие связи 14, узлы крепления котОрь7Х на верхней раме 3 и исполнительном механизме 8 находятся на од-ном уровне,и увеличивая зазор между упорш 1и 12 и поворотными кронштейнами 10„ Бее это позволяет самоустанавлизаться опорной плите 9 на грунте и проводить сеанс развертки, не передавая вибрацию на источник.
При подъеме вверх опорной плиты 9 с исполнительным механизмом 8 первыми нагружаются гибкие связи 14, которые поворачивают поворотные кронштейны 10 вокруг оси 11 до соприкосновення с упорами 12, При дальнейшем подъеме равномерно наг ружаютоя гибкие связи 14 и упоры 12 в пределах упругих деформаций. Длина гибких связей 14 выбрана такой, что нагружение ик происходит, когда остается около 10% хода цилиндров б подъёма-опускания .
В зависимости от вида источников oeйc шчecкиx сигналов, которые подразделяются на легкие (с усилием до 6 тс) средние (до 15 тс) и тяжелые (свыше 15 тс) , :сибкие связи 14 выполняются в ви,це тросов, цепной передач или системы пружин, ...
fijiH легких источников гибкие связи 14 выполняются в ви,це пружин раст жения или сжатия, или в виде тросов в зависимости от конструкции транспортного средства и исполнительного механизма 8, так как исполнительный механизм 8 и опорная плита 9 имеют малые массы, а значит и малые инерционные силы.
Средние источники имеют инерционные силы таких значений, которые не позволяют применять гибкие связи 14 в виде пружин, поскольку это связано с применением пружин больших , сложностью их установки и большого веса, поэтому применяются гибкие связи 14 в .виде тросов.
На тяжелых источниках с очень болшими значениями икерамонных сил от исполнительного механизма 8 и опорной плиты 9 гибкие связи 14 ВЬТПО аНЯются Б виде цепней передачи, которая по сравнеии5с с тросами имеет меньшую массу и конструктивно проще узлы соединения с транспортным средством н исполнительным механизмом.
Упоры 12, выполненные в вИде корпуса с упругими- элементами (например техническая резина, полиуретан, капрон и т.д.), и гибкие связи 14 нагружаются Е пределах упругих деформаций для того, чтобы выбрать все конструктивные зазоры и обеспечить жесткость системе: транспортное средство исполкительйый механизм 8 и поворотные кронштайны 10 в транспортном положен ик
Силы упругих деформаций больше инерционных сил исполнительного меха низма 8 и опорной плиты 9.
Использование изобретения позволит обеспечить подъем-опускание и
фиксацию в транспортном положении опорной плиты и исполнительного механизма цилиндрами подъема-опускания нижней рамы, что упростит и снизит металлоемкость конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1983 |
|
SU1125567A1 |
| Вибрационный источник сейсмических сигналов | 1984 |
|
SU1166030A1 |
| ВИБРАЦИОННЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ | 1991 |
|
RU2044329C1 |
| Источник сейсмических сигналов | 1987 |
|
SU1582158A1 |
| СПОСОБ ПОГРУЗКИ И РАЗГРУЗКИ ДЛИННОМЕРНОГО ГРУЗА С ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2057660C1 |
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2792193C1 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| Источник сейсмических сигналов | 1989 |
|
SU1755225A1 |
| Источник сейсмических сигналов | 1987 |
|
SU1500960A1 |
| Источник сейсмических сигналов | 1985 |
|
SU1341601A1 |
1. ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ, содержащий опорную плиту, установленный, на ней исполнительный механизм, цилиндры подъема-опускания, устройство виброизоляции, тягач и прицеп, включающий нижнюю и верхнюю рамы, шарнирно соединенную по концам с тягачом и нижней рамой, которая задним концом связана с осью прицепа, а передним концом - с верхней рамой посредством цилиндра подъема-опускания, отличающийс я тем, что, с целью упрощения конструкции, он снабжен поворотными кронштейнами, соединенными осями с нижней рамой, гибкими связями, соединяющими исполнительный механизм с верхней рамой и упорами, установленными на нижней раме, устройство виброизоляции расположено между опорной плитой и поворотными кронштейнами, оси которых расположены над упорами и центрами тяжести исполнительного механизма и опорной плиты и под точками закрепления гибких связей. 2.Источник ПОП.1, отличающийся тем, что гибкие связи выполнены в виде тросов. i 3.Источник ПОП.1, отлича(Л ющийся тем, что гибкие связи выполнены в виде цепной передачи. 4.Источник по п.1, отличающий с я тем, что гибкие связи выполнены в виде системы пружин растяжения или сжатия.
; 7
/// //у //////////////////////у( /// л /////////
фак J
f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для заливки свинцом стыковых рельсовых зазоров | 1925 |
|
SU1964A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
