Изобретение относится к области автоматики. По основному авт. св. № (07290 известно устройство для непрерывного йзмере1шя переменной величины, содер жащее следящую систему, состоящую из датчика положения, испапнительного элемента, детектора ошибки, выход, которого соединен с входом исполнительного элемента, который механически соединен с датчиком положения и измерителем рассогласования, выход датчика полож.еш1я подключен к Первому входу детектора ошибки, блок вычитания, сумматор и блок формирова иия эталона, выход которого соединен с первым входом сумматора, и со вторым входом детектора ошибки, выход которого подключен к первому входу блока вычитания, к второму входу которого подключен выход измерителя ра согласования, а вьтход блока вычитания через фильтр соединен с вторым входом .сумматора. Работа известного устройства заключается в слежении за сигналом эталона и по сигналам ошибки слежения и рассогласования между измеряемой величиной и полсженнем нс полнательного механизма в формировании истинного значения измеряемой пв ременной величины. При этом произво дится компенсация систематических погрешностей следящей системы ij . Однако дискриминационная характе ристика измерителя рассогласования может быть очень узкой, и, кроме, того, содержать боковые лепестки. Эталон же не всегда удается сформировать таким образом, чтобы его отклонение от измеряемой величины находилось в пределах главного лепестка дискриминационной характе ристики. Это будет приводить к неправильному опредепеш€ю сигнала рас согласования, следствием чего будет являться либо систематическая ошибка измерения (измерение по боковому лепестку), либо срыв слежения (неограниченное возрастание измереного значения переменной величины Цель изобретения - повышение точ ности и надежности измерений. Поставленная цель достигается тем что в устройство введены второй сумматор, генератор тактовых импульсов и последовательно соединенные пороговый элемент, реверсивньп счетчик, цифроаналоговый преобразователь и второй фильтр, причем выход измерителя рассогласования связан с входом порогового элемента, блок формирования эталона соединен с входом детектора ошибки и первым входом первого сумматора через второй сумматор, к второму входу которого подключен выход второго фильтра, а генератор тактовых импульсов соединен со счетным входом реверсивного счет чика. На чертеже изображена блок-схема устройства. Устройство для непрерывного измерения пзременной величины содержит следящую систему 1, датчик 2 положения, исполнительный элемент 3, детектор 4 ошибки, измеритель 5 рассогласования, блок 6 вычитания, фильтры 7 и 8, сумматориа 9 и 10, пороговый элемент 11 , реверсивный счетчик 12, цифроаналоговый преобразователь 13, блок 14 формирования эталона, генератор 15 тактовых импульсов. Устройство р.5отает следующим обр.азом. В начальном положении счетчик 12 установлен в состояние, в котрром в старший его разряд записана 1, а в остальные разряды - О, а цифроаналоговый преобразователь 13 и фильтр 8 настроены таким образом, что при этом на выходе фильтра 8 образуется нулевой сигнал. БЛОК 14 формирования эталона, не имекщий случайных флюктуации, динамические характеристики которого близки к динамическим характеристика м измеряемой переменной, определяет в этом случае программу движения исполнительного элемента 3. Реальное положение испапнительного элемента 3 (f , отсчитанное по показателям датчика 2 положения, сравнивается с эталонным.tfj в детекторе 4 ошибки. Возникающий в процессе сравнения сигнал ошибки QСР, tf--(р с выходом детектора 4 подается в исполнител ный элемент 3 для отработки. В общем случае величина.сигнала ошибки определяется точностными характеристиками следящей системы 1 И принципиально не может равняться нулю. Одновременно с вычислением сигнала ошибки &( производится в измерителе 5 рассогласова1П1я опреде.пение рассогласования дц) , существующего между измеряемой переменнойс и положением исполнительного элемента Зср ,Последующее вычитание в блоке 6 вычитания из измеренного рассогласо вания сигнала си темы 4, позволяет определить откло нение йц -ftttj-lH i lp 2 измеряемой переменнойлр от ее эталона(2 и делает это отклонение независимым от собственных ошибок следящей системы 1. Если измеряемая переменная ( явл ется суммой истинной ист Флюктуационной SIYI составляющих tf5-(f,8, то отклонение ш таюке- будет являть ся суммой реально еуществукщего отклонения GO измеряемой переменной от эталона, и флюктуационнрй составляющей 0, т.е. . Последующая фильтрация отклонени Д фильтром 7 п озволяет уменьшить составляющую Од, и получить уточненную оценку реально существующего от клонения. Результат измерений формируется виде ( Ч сумматоре 9 В качестве эталон пользуется ли бо априорные данные об измеряемой переменной (начальная величина, ско рость, ускорение и т.п.), либо эталон строится в виде экстраполирующей функции на основании проводимых kзмepeний. В любом случае ошибки an .орных данных и экстраполяции могут повысить линейную часть участка дискриминационной характеристики измеритепя 5 рассогласования. Для того, чтобы избежать возникающей при этом погрешности определения (а значит , лоследний i поступает на порог овьй элемент с характеристикой Г Mf /uifj uq o . . При этом величина определяется В1еличиной линейной части дискриминационной характеристики измерителя 5 рассогласования. Пока счет;чик 12 .находится.в начальном состоя|нии. Знак сигнала у определяет в катком находится счетчИк 12 (прямого счета при tf О или обратного счета Ij 0) .Цифроаналоговый преобразователь 13 и фильтр 8 формируют корректирующее напряжение А р смещающее значение эталона (f таким образом, чтобы .отрабатьшаемый Сигнал лежал на линейном участке дискриминационной .характеристики измерителя 5 рассогласования (у 0). Диапазон счетчика 12 и.частота счета вьйираются таким образом, чтобы обеспечить плавность коррекции во всем.динамическом диапазоне измеряемого сигнала t и доя максимально возможных ошибок задани{1 этал.онного сигнала. Таким образом, независимо от величины отклонения эталона от изме.. ряемой величины устраняется погрешность следящей системы. Кроме того, максимально допустимая скорость изменения измеряемой величины у предлагаемого устройства на порядок вьше, чем у известного, что значительно увеличивает его надежность и расширяет диапаз он действия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации погрешности измерения и диагностического контроля измерительного канала | 1982 |
|
SU1070514A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ПЕРЕМЕННОЙ ВЕЛИЧИНЫ | 1973 |
|
SU407290A1 |
| Следящая система | 1991 |
|
SU1833832A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Приемник дискретных частотно-модулированных сигналов | 1986 |
|
SU1385317A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ | 1992 |
|
RU2082985C1 |
| Инкроментный умножитель аналоговых сигналов | 1982 |
|
SU1057970A1 |
УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ПЕРЕМЕННОЙ ВЕЛИЧИНЫ по авт. св. № 407290, отличающееся тем, что, с целью повышения точности и надежности устройства. в него введены второй суммптор, генератор тактовых импульсов и последовательно соединенные пороговый элемент, реверсивный счетчик, цифроаналогов.ый преобразователь и второй фильтр, причем выход измерителя рассогласования связан с входом порогового элемента, блок формирования эталона соеданен с входом детектора ошибки и первым входом первого сумматора через второй сумматор, к второму входу которого подключен выход второго фильтра, а генератор тактовых импульсов соединен со счетным входом реверсивного счетчика.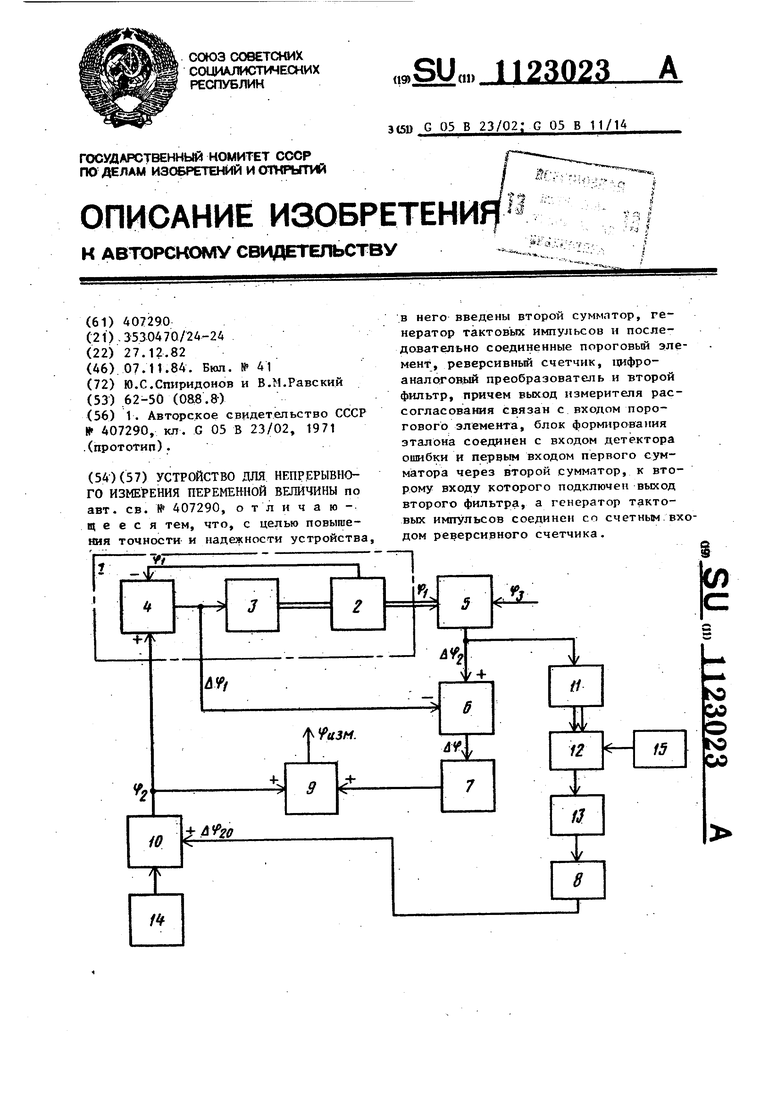
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ПЕРЕМЕННОЙ ВЕЛИЧИНЫ | 0 |
|
SU407290A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
