и диодов в скважинный релейный переключатель, блок питания и связанный со скважинныг1 снарядом посредством семижильного бронированного каротажного кабеля наземный пульт управления с системой измерения сигналов круговой реохорды (регистрирующий прибор), блоком питания, релейным переключателем, кнопками управления, связанными с релейными переключателями по системе ручного управления 3.
Недостатком известного устройства .является сложность управления,сбои в процессе ориентации из-за сложности фиксации начала отсчета и значительные затраты времени в каждой точке ориентации.
Цель изобретения - повышение точ нести ориентации и сокращение сроков геологоразведочных работ.
Поставленная цель достигается тем, что в устройство для ориентации сейсмоприемников в скважинах,содержащем скважинный снарял, в котором установлены контейнер с трехкомпонентной ортогональной системой сейсмоприемников , гироскоп и арретирующий его механизм с контактной группой , первый круговой преобразователь угла на оси наружной раглы гироскопа, первый исполнительный электродвигатель с редуктором и кинематической парой, блок питания и скважинный релейный переключатель, при этом ось вращения контейнера связана с первым исполнительным электродвигателем через редуктор и кинематическую пару, соединенный через семижильный бронированный кабель с наземным пультом, содержащий блок питания, регистрирующий прибор со стрелкой и шкалой и наземный релейный переключатель, в скважинном снаряде дополнительно установлены первый усилитель,второй круговой преобразователь угла на оси контейнера и корпусе снаряда, при этом первый круговой преобразователь угла установлен также и на оси контейнера, скважинный релейный переключатель выполнен в виде разнополярного кольцевого распределителя, в наземном пульте дополнительно установлены второй усилитель, третий круговой преобразователь угла на оси регистрирукипего прибора и корпусе пульта, второй исполнительный электродвигатель с редуктором и кинематической паЬой на оси регистрирующего прибора4 .ориентирующий механизм с контактной группой, реле времени разгона и реле времени торможения ротора гироскопа, при этом первый круговой преобразователь, связанный через скважинный релейный переключатель с первкал усилителем и через него с первым исполнительным электродвигателем, образует следящий привод, а второй круговой преобразователь,
связанный через скважинный релейный переключатель и наземный релейный переключатель с третьим круговым преобразователем-, второй усилитель и второй исполнительный электродвигатель образуют первый ддистанционный следящий привод, третий круговой преобразователь, связанный через наземный релейный переключатель и скважинный релейный переключатель со вторым круговьм преобразователем, первый усилитель и первый исполнительный электродвигатель образуют второй дистанционный следящий привод, а наземный релейный переключатель циклически связан с контактной группой ориентирующего механизма,реле времени разгона и реле времени торможения ротора гироскопа и синхронно - со скважиннь релейны переключателем и через него с контактной группой арретирующего механизма.
Для упрощения фиксации начала отсчета шкала установлена с возможностью вращения вокруг оси регистрирую1дего прибора.
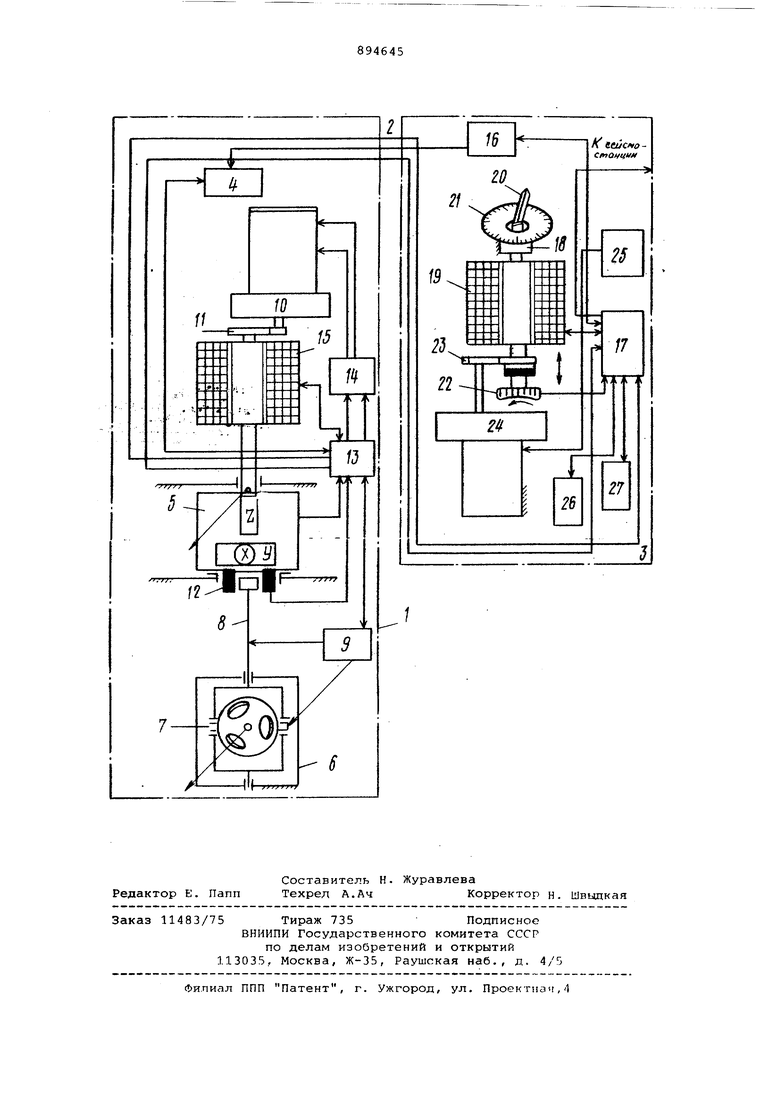
На чертеже изображена структурная схема устройства для ориентации сейсмоприемников в скв.ажинах.
Устройство состоит из скважинного снаряда 1 и связанного с ним через семижильный, например с жилами 1ж-7ж {не показаны), бронированный каротажный кабель 2 наземного пульта 3 управления.
Внутри снаряда 1 расположены блок 4 питания, контейнер 5 с ортогональной системой сейсмоприемников по осям X , Y , Z , гироскоп 6 с арретирующим по оси 7 внутренней рамы и по оси 8 наружной рамы гироскопа 6 арретирующим механизмом 9 с контактной группой на нем (не показана), первый исполнительный электродвигатель 10 с редуктором, связанный с осью вращения контейнера 5 через кинематическую пару 11. Первый круговой преобразователь 12 угла установлен на оси 8 наружной рамы гироскопа 6 и на оси вращения контейнера 5. Скважинный релейный переключатель 13 выполнен в виде разнополярного кольцевого распределителя и связан с цепями сейсмоприемников в контейнере 5, ротором гироскопа 6, механизмом 9 арретира и его контактной группой, жилами 1ж-7ж кабеля 2, электродвигателем 10, преобразователем 12 и с установленны чи в снаряде 1 первым усилителем 14 и вторым круговым преобразователем 15 угла на оси контейнера 5 и корпусе снаряда 1.
В пульте 3 с блоком 16 питания наземньм релейным переключателем 17 и регистрирующим прибором 18 установлены третий круговой преобразователь 19 угла на оси регистрирующего- прибора 18 со стрелкой 20 и шкалой 21 и корпусе пульта 3, ориентирующий механизм с ручкой 22 и контактной гру пой (не показана), связанный, с осью регистрирующего прибора 18, которая связана через кинематическую пару 2 со вторым исполнительньтм электродви гателем 24. С переключателем 17 свя заны блок 16 питания, кнопки управления (не показаны), контактная гру па ориентирующего механизма,вход сейсмостанции, жилы 1ж-7ж кабеля 2, преобразователь 19 и установленные в пульте 3 электродвигатель 24,второП усилитель 25, реле 26 времени разгона и реле 27 времени торможения ротора гироскопа б. Устройство обеспечивает последовательно и синхронно перевод связей элементов и механизмов в циклы регистрация , подача питания в скважинный снаряд, разгон ротора ги разарретированке осей роскопа рам гироскопа, совмещение осей, ориентация - контроль, арретирование осей рам гироскопа, тормо жение ротора гироскопа, снятие питания скважинного снаряда. При этом циклы совмещение осей и регистрация устройство обеспечивает авто матически. В исходном состоянии регистрация скважинные сейсмоприемники в контейнере 5 через переключатель 13, жилы, например, кабеля 2 и переключатель 17 связаны с входом сейсмостанции. В цикл подача питания в скважин ный снаряд устройство приводится в время нахсатия кнопки включения устройства. За это время сначала подготавливаются, например, первые син хронизирующие цепи в переключателе 17, а затем через него жилы 1ж-б ког.чмутируются с входа сейсмостанции на цепи питания и управления в пульте 3, а через 7ис в снаряд 1 поступает первый, например, положительный управляющий импульс, посредством которого через переключавталь 13 жилы 1ж-бх коммутируются с цепей сейсмоприемников и связываютсл например, жилы 1ж-3ж с блоком 4 питания и блок 4 - с обмоткой ротора гироскопа б . В момент коь- утации жил в снар5вд 1 в пульт 3 по жиле, например, 4ж поступает синхронизирующий сигнал (замыкание цепи), посредством которого через уже подготовительные пер вые цепи синхронизации переключатель 17 связывает блок 16 питания с жилами 1ж-3ж и запускает реле 26 времени разгона ротора гироскопа б, которым нормируется время разгона ротора, зависящее от длины кабеля 2, в течение которого все другие потребители в снаряде 1 отключены. В конце цикла разгон ротора гироскопа реле 26 времени разгона через переключатель 17 посылает в жилу 7ж второй управляющий, например, отрицательный импульс, посредством которого переключатель 13 связывает с 6hoKOM 4 питания механизм 9 арретира. При этом в момент разарретирования осей 7 и 8 рам гироскопа б переключатель 13 посредством контактной группы на механизме 9 арретира связывает с блоком 4 питания цепи возбуж,цения электродвигателя 10, преобразователя 12, например, сельсина, преобразователя 15, например, сельсина, цепи управления преобразователя 12 - с цепями управления электродвигателя 10 через первый усилитель 14, а цепи управления преобразователя 15 - с жилами 4ж-6ж кабеля 2. В полный цикл совмещение ос устройство связывается после коммутации жил 4ж-6ж к кабелю 2. В этот момент в пульт 3 поступает синхронизирующий сигнал (разрыв в цепи жилы 4ж), после чего переключатель 17 отключает жилы 4ж-бж от его цепей синхронизации и связывает их с у правляющими цепями преобразователя 19, например, сельсином, его цепи возбуждения - с цепями управления электродвигателя 24 через второй усилитель 25, а цепи возбуждения электродвигателя 24 - с блоком 16 питания. В цикле совмещение осей, в котором ось, например, в контейнере 5 совмещена с главной осью гироскопа 6 посредством, например,местного следящего привода, состоягаего из преобразователя 12 и связанных с ним через переключатель 13 первого усилителя 14 с электродвигателем 1в, связанным через кинематическую пару 11 с осью вращения контейнера 5, в котором она связана со стрелкой 20 на оси регистрирукнцего прибора 18посредством преобразователя 15 в режиме датчика, преобразователя 19в режиме приемника, усилителя 25, электродвигателя 24 с кинематической парой 23, связанных в дистанционный следящий привод через переключатели 13 и 17, производятся спуско-подъемные операции, измерения углов ухода главной оси гироскопа 6 относительно перенесенного им, например, с поверхности, пространственного начала отсчета при зафиксированном корпусе снаряда 1 в каждой точке посредством стрелки 20 и шкалы 21 на оси регистрирующего прибора 18 и исключение из измерений углов вращения корпуса снаряда 1 относительно главной оси гироскопа 6 посредством совмещения нулевой риски шкалы 21 против оси стрелки 20 в каждой последующей точке.
В цикл ориентации устройство связывается на время нажатия ручки 22 ориентирующего механизма. При этом ось регистрирующего прибора 18 выходит, например, из зацепления с кинематической парой 23, и посредством сигнала с контактной группы ориентирующего механизма переключатель 17 переводит преобразователь 19 в режим датчика и посылает через жилу 7ж в снаряд 1 положительный управляющий сигнал, посредством которого переключатель 13 откпючает от входа первого усилителя 14 преобразовател, 12, переводит преобразователь 15 в режим приемника и связывает его с первым усилителем 14. Вращением ручки 22 ось, например ос контейнера 5, поворачивается на уго ориентации отсчитанный по шкале 21 против оси стрелки 20, посредств преобразователей 19 и 15, первого усилителя 14, электродвигателя 10, связанных в дистанционный следящий привод через переключатели 17 и 13.
Контроль поворота контейнера 5 осуществляется возвратом ручки 22 в исходное состояние. При этом, если контейнер не повернут на уголШо, т ось стрелки 20 возвращается в положение, отличное от tVof посредством дистанционного следящего привода в режиме совмещение осей, но при отключенном преобразователе 12 от первого усилителя 14.
В цикл регистрация устройство связывается через циклы арретирование осей рам гироскопа, торможение ротора гироскопа, снятие питания скважинного снаряда посредством кнопки выключения устройства. При этом через переключатель 17 жил 4ж-бж кабеля 2 коммутируются с цепей преобразователя 19 на вторые цепи синхронизации в нем, в жилу 7ж с него поступает отрицательный управляющий сигнал, посредством которого в снаряде 1 через переключатель 13 с блоком 4 питания связывается механизм 9 арретира, и, после арретирования осей 7 и 8 рам гироскопа б, переключатель 13 посредством сигнала с контактной группы на механизме арретира 9 коммутирует жилы 4ж-6ж с цепей преобразователя 15. В момент коммутации по жиле, например 5ж, в пульт 3 поступает синхронизирующий сигнал (замыкание цепи) посредством к 1торого переключатель 17 запускает реле 27 времени торможения ротора гироскопа, б и обращает фазы питающего снаряд 1 источника в блоке 16 питания.
В конце цикла торможение ротора гироскопа., длительность которого зависит от длины кабеля 2 и температуры окружающей снаряд 1 среды, реле 27 времени торможения
через переключатель 17 снимает питание с жил 1ж-3ж в пульте 3 и посылает в жилу 7ж положительный управляющий сигнал, посредством которого в переключателе 13 все релейные элементы возвращаются в исходное состояние., и через него жилы 1ж-6ж кабеля 2 связываются с цепями сейсмоприемников. В момент коммутации по жиле 5ж в пульт 3 поступает синхронизирующий сигнал (разрыв цепи), посредством которого переключатель 17 переключает жилы 1ж-бж к входу сейсмостанции.
Каждый раз при введении уст- г ройства в цикл совмещение осей ,при зафиксированном положении корпуса снаряда 1 может происходить смещение главной оси гироскопа 6 под воздействием, например, механизма 9 арретира. Для сохранения начала отсчета на поверхности для кдой последующей точки в предыдущих точках измеряются углы j- смещения оси, а угол Шои + ; ориентации в каждой последующей определяется как сумма SttTH углов (JU|- измеренных во всех предыдугдих точках, прибавленая к углу ориентации в данной точке
% /-5и;у,ц-иУоЦикличность связей и нормирование времени разгона ротора гиромотора обеспечивают поддержание в скважинн снаряде напряжения источника в допустимых пределах, что исключает сбои и повышает точность гиростабилизации, а цикличность связей и нормирование бремени торможения ротора значительно сокращает время готовности в каждой точке ориентации.
Разнополярность скважинного релейного переключателя и синхронная связь поверхностного релейного переключателя со скважинным предотвращает сбои и упрощает процесс ориентации.
Связь следящего механизма через усилитель мощности обеспечивает снижение возмущающих моментов, прикладываемых к гироскопу, что повышает точность гиростабилизации, а сельсина в поверхностном пульте через второй усилитель мощности обеспечивает компенсацию потери мощности-сигнала в кабеле.
Формула .изобретения
1. Устройство для ориентации сейсмоприемников в скважинах,содержащее скважинный снаряд, в котором установлены контейнер с трехкомпонентной ортогональной системой сейсмоприе иников, гироскоп и арретирующий его механизм с контактной группой, первый круговой преобразователь угла на оси наружной рамы гироскопа, первый исполнительный электродвигатель с редуктором и -кинематической парой, блок питания и скважинный релейный переключатель, при этом ось вращения контейнера связана с первым исполнительным элек тродвигателем через редуктор и кинематическую пару, соединенный через семижильный бронированный кабель с наземным пультом, содержгицим блок питания, регистрирующий прибор со стрелкой и шкалой и наземный релейный переключатель, отличающееся тем, что, с целью повьшения точности ориентации и сокращения сроков геологоразведочных работ, в скважинном снаряде дополнительнр установлены первый усилитель,второй круговой преобразователь угла на оси контейнера и корпусе снаряда, при этом первый круговой преобразователь угла установлен также и на оси контейнера, скважинный релейный переклю чатель выполнен в виде разнополярного кольцевого распределителя, а в наземном пульте дополнительно, установлены второй усилитель, третий кру говой преобразователь угла на оси регистируюиего прибора и корпусе пул та, второй исполнительный электродви гатель с редуктором и кинематической парой на оси регистрируюиехчэ прибора ориентирующий мехайизм с контактной группой, реле времени разгона и реле времени торможения ротора гироскопа, при этом первый круговой преобразова тель, связанный через скважинный релейный переключатель с первьвл усилителем и через него с первым исполнительньт электродвигателем, образует следящий привод, а второй круговой преобразователь, связанный через скважинный релейный переключатель и наземный релейный переключатель с третьим круговым преобразователем, второй усилитель и второй исполнительный электродвигатель образуют первый дистанционный следящий привод,третий круговой преобразователь, связанный через наземный релейный переключатель и скважинный релейный переключатель со вторым круговым преобразователем, первый усилитель и первый исполнительный электродвигатель образуют второй дистанционный следящий привод, а наземный релейный переключатель ииклически связан с контактной группой ориентирующего механизма, реле времени раз17она и реле времени торможения ротора гироскопа и синхронно - со скважинныг-1 релейным переключателем и через него с контактной группой арретирующего механизма. 27 Устройство по П.1, о т л ичающееся тем, что для упрощения фиксации начала отсчета,шкала установлена с возможностью вращения вокруг оси регистрирующего прибора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 376739, кл. 6 01 V 1/40, 1973. 2.Виноградов Ф.В. Некоторые результаты опробования трехкоьотонен,тного сейсмоприемника. Сб. Обменные и поперечные волны в сейсморазведке. М., Недра, 1967, с. 141-145. 3.Гальперин Е.И. Поляризационный метод сейсмических исследований. М., Недра, 1977, с. 77-78.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU920605A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1982 |
|
SU1053039A2 |
| Трехкомпонентное сейсмокаротажное устройство | 1978 |
|
SU1133572A1 |
| Скважинный гидролокатор | 1988 |
|
SU1640392A1 |
| СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН | 1991 |
|
RU2015316C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| Устройство для одновременного измерения нескольких параметров при производстве электрокароттажных работ на одножильном кабеле | 1952 |
|
SU101497A2 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО ИССЛЕДОВАНИЯСКВАЖИН | 1971 |
|
SU309122A1 |