(5) УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ СЕЙСНОПРИЕМНИКОВ В СКВАЖИНЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| Устройство для ориентации сейсмоприемников в скважине | 1982 |
|
SU1053039A2 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1979 |
|
SU894645A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Многоприборный трехкомпонентный ориентируемый зонд | 1980 |
|
SU928285A1 |
| Многоприборный трехкомпонентный ориентируемый зонд | 1979 |
|
SU864218A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Устройство для ориентиации сква-жиННОгО зОНдА | 1979 |
|
SU840776A1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
1
Изобретение относится к сейсмическим исследованиям и предназначено для получения ориентированных в пространстве сейсмических записей в скважинах
Известно устройство, применяемое для ориентации сейсмоприемников в скважинах, которое позволяет работать как в необсаженных, так и в осаженных скважинах, используя для ориентации известный азимут наклона ствола скважины, и содержит контейнер с сейсмоприемниками, установленный на опорных иголках и связанный с сердечником одного из соленоидов через круговой фиксатор, расположенный на торце контейнера, и зуб-фиксатор на рычаге, а с сердечником другого соленоида - через шайбу с конусной выточкой. Соленоиды установлены в узлах управления. Все узлы расположены в . трубе П .
Недостатками устройства являются невозможность ориентировки сейсмоприемников 8 вертикальной скважине.
поскольку азимут ее ствола равен нулю, а также невозможность осуществления принудительной ориентации с поверхности, что является необходимым для проведения сейсмических наблюдений по заранее заданной програмгне.
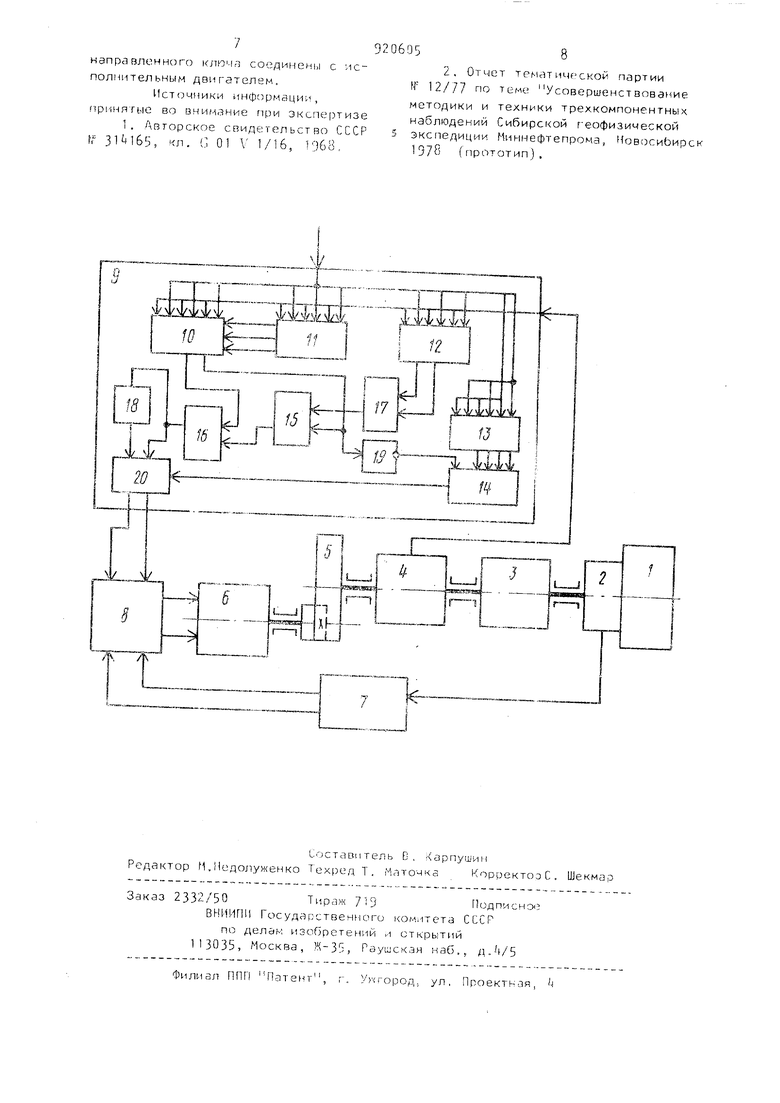
Наиболее близким к предлагаемому является устройство для ориентации сейсмоприемников в скважине, содержащее гироскоп, на внутренней рамке которого закреплен датчик гироскопа, усилитель, блок сейсмоприемников, жестко связанный с наружной рамкой гироскопа и помещенный в контейнер, ось вращения, которого связана с ротором датчика угол-код, другой конец которого через редуктор соединен с исполнительным двигателем. В этом устройстве для принудительной ориентации блока сейсмоприемников по существу используется сельсинная система, состоящая из скважинного сельсина, роль которого выполняет датчик угол-код, и наземного сельсина, 3 соединенных между собой тремя жилзми коротажного кабеля 2. Недостатком устройства является относительно невысокая точность пере дачи угла при принудительной ориентации сей смоприе мни к о в,достигающая + 17 и связанная с необходи1 осью использования трех : ильного кабеля что приводит к зна|- ительным погрешностям в процессе его работь за счет индукционного токового взаимодействи между жилами кабеля, соеди чя101цими ст торные обмегтки сельс/ii-iOB, и по которым юдается чапрлиение пит.:, н и я, Целью изобретения является повы шение точности передачи угла при принудительной ориентации сейсмоприемников.. Цель достигается тем, что в устройство для ориентации сейсмоприемников в скважине, со.дер ха1цее гироскоп, на внутренней рамке которого закреплен датчи, пироскопа, усилитель, блок сейскоприемников, жестко связанный с наружной рамкой гироскопа и помещенный в контейнер, ось зоащен,.я которого связана с ро-тором датчика .гол-код, другой коне которого через редуктор соединен с исполнительным дв/i: зтелем, дополни тельно зведень бло;; опре,п,епения и преобразования рассотйсосания и дв направленный ключ, причем датчик у гол-код соединен с блоком определе ния и преобразования рассогласовани выходы которого соединены с первой парой входов двунаправленного ключа вторая пара входов последнего соедкг иена с выходами усилителя, а два БЬ1Хода двунаправленного ключз соеди нены с .(сполнительнын двигателей. При таком исполнелик устройства обеепе-и-шэется высокая точность пер дачи угла и представляется возможно использования одножилы-юго каротажного кабеля, что зна ительно повыша ет его надежность. Ма чертеже изобрах-се -З конструкци предлагаемого устройствз. Устройство содержит гироскоп 1, на внутренней рамке которого, враща ющейся в азимутальной гитоскости,, за реплен датч.К 2 гироскопа. Тс1; осъек НИКИ датчика гороскопа закреплены н корпусе гироскопа. Внутренние рамк гироскопа застопорены с помоцью фиксаторов арретивного м.еханизма, 54 приводимых в действие электромагнитом. Нару(ная рамка (корпус) гироCKvona жестко связана с блоком сейсмоприемникоз 3, содержащим три оргогонально расположенных сейсмоприемника Хс YJ Z, Блок сейсмоприемников установлен в контейнере, ось вращения хоторого связана с одним концом ротора датчика у гол-код 4, другой конец ротора через редуктор 5 соединен с исполнительным двигателем 6, причем датчик гироскопа сое.аинен с ;-1спслнительным двигателем через усилитель 7 и двунаправленный ключ 8, Другие входы хоторого с.оединены с выходом датчика ,/гол-код через блок определения и преобразования рассогnai; зания 9 . Устройство работает ;ледуюцим обпазом. юсле разгона гиромоторз и включения электромагнита арретира внутренние рамки гироскопа 1 освобождаются фиксаторов зроетирного механизма и гироскоп преобретает 3 степени свободьг, т„е ст.эновится свободным гироскопом,. Ось 13ращения гиромотора за счет к инетического момента сохраняет свою ориентацию в гфостранстве неизменной;, и ее направление становится начальной точкой отсчета азимута. Одновременно на двунаправленный ключ 8 подается управляющий снгь;ал (команда с поверхности ка вк-пючение или выключение арретира)j который разрешает подачу напряжения из исполнительный двигатель 6 от усилителя 7. С выхода датчика /: rtipocKona при подаче напряжения питания снимается напря; {ение, пропорцко альное азимутальному углу поворота корпуса гироскопа 1 (а следовательно, и блока сейсмоприемников 3). Предель изменения угла поеоротл ( фУгксируе е, При переходе через н левое значение угла поворота напряжение на выходе датчика гироскола перехо/;,ит через нуль и изменяет свою фазу на 180 . Напряжение рассогласования с датчика г;4роскопа 2 постугтает через усилитель 7 мощности -и двунаправленный ключ 8 ка исполнительный двигатель 6, Двигатель 6 пoвopaч ,вaeт блок сейсмспрмемников 3 с корпусом гироскопа 1 до тех пор, лока сигнал рассогласования с выхода датч.-1ка гироскопа не уменьшится, ,, система не войдет в зону нечувствительности. При повороте ксрпуса гироскопа 1 в обратную сторону напря жение на выходе датчика 2 гироскопа увеличивается и меняет свою фазу на . Усиленный рассогласования при этой реверсирует доигатель 6 и поворачивает блок сейсмоприсмников 3 с корпусом гироскопа 1 в обратную сторону. Принудительная ориентация блока сейсмоприемников 3 осуществляется с помощью датчика угол-код 4, блока определения и прео разования рассогласования 9; ДВУ направленного ключа 8 и испол:нетельного двигателя 6, Блок определения и преобразования рассогласования 9 может содержать три цифровых компара тора 10 (СС1), 11 (СС2) и 12 (ССЗ) арифметическое логическое устройство (АЛУ) 13 и цифро-аналоговый преобразователь (ЦЛП) 1.;, соединенные с выходом датчика угол-код А икаротажным кабелем и через логические сх мы И 15, ИЛИ 1б и 17, НЕ 18 и 19 с двунаправленными клюиом 8. При выключении электромагнита арретира на двунаправленный ключ 8 поступает управляющий сигнал, который разрешает подачу напряжения на испол нительный двигатель 6 от блока определения и преобразования рассогласования 9. .Код команды (код А для стар ших разрядов и код а - для младших разрядов), пропорциональный заданному углу поворота блока сейсмопрнемников 3, поступает с поверхности по каротажному кабелю на один из входов блока определения и преобразования рассогласования 9, на другой вход которого с выхода датчика угол-код Д подается код обратной связи (код В для старших разрядов и код в - для младших разрядов). Компараторы 10 и 11 блока 9 осуществлнют сравнение кодов старших разрядов входной команды (код А) с соответствующими раз рядами кодов обратной связи (код В), Сравнение младших разрядов производится компаратором (ССЗ) 12 блока Э, В этом случае, если сравнение старших разрядов дает результат , а сравнение младших разрядов . 7/ в . или сраанение только старших разрядов дает результат А 7 В., на выходе схемы НИИ 1б блока 9 появляется высокий потенциал (логическая 1). При любых других результатах сравнения на выходе схемы ИЛИ 16 появляется низкий потенциал (логический 0). Потенциал с выхода схемы ИЛИ 16 подается на кл1ач 20, с ЦАП 1, преобразующего разность кодов () , вычисленную АЛУ 13, в эквивалентный аналоговьй С1гнал, Поступающее с бл.око 9 иэпря кение застаБляет Bpauiaibс я Б а j 1 и с 11 о л ни тельного д в и г а т с п я 6 , пр :- повороте которого с датчика угол - код в блок 9 посту-пае непрерывно меняющийся код обратной связи. Так1-1м образом, сравнен - е кодов происходит нег1рерырп-1О, : .: .1Г :,.;. ,..; TCi ,ц,1ал i;j;it., , . .. .S ,:. выхспс схемь ИЛИ 16 на времк, оги еделяс.юе временем сравнения MJiorviii-tx разрядов, ото обеспечивает по;;;агопь Й ре).(И)1 работы 1-сгоЛ|-1чтельногс: , ,глтеля 6; UTC позволяет преодо.г17:;;с;ть его HHepiuiob-h ocTb путе,. реверс рования ос t;p:;M:-, соотзе струюи се ijefseнем существозания (и адыего разряда, Точность передачч угла о устройстве (учень вь-сока, ocKo.-ibKv определяет: - только norpeii.i-осЬО цатчика угсл-код. i-i равна ± NLnaqiijero разряда, а перере|улировачис электродвигателя полностью исключено.(роме тоге, устоойсто ьюжст рабСТагь с о.инОКЛ ь:-:ьм з5а;1ем, что псзволяс иа6е):(ать недостатков, CBRsai-i-.-f-x с Форг-.ула i3обретем -1 я Устройство для ориентаи1-.и сейсмоприемников в скважине, содержащее гироскоп., на знутренней рамке кото- рого закреплен цатчик гироскопа, ус1-:л11тель, блок сейсмоприемников, жестко связак-мый с иарунгиой рамкой гироскопа и помещенный в контейнер, ось вращения которого связана с ротором датчика угол-код, другой конец которого через редуктор соединен с исполнительнь;к двигателем, о т л м чающее с я тем, что, с целью повышения точности передачи угла при принудительной ориентации сейсмоприeMHtiKOB, в него дополнительно введены оло--: определения и преобразования рассогласования и двунаправленный , причем датчик угол-код соединен с блоком определения и прбобразова -:ия оассогласозания, выходы которого соединены с первой парой входоз 8yнaпpaзJ зннoгo ключа, вторая пара входов последнего соединена с аыхо- ами усьлителя, а два выхода дгзу7направленного клю1л соединены с исполи1-1тельным двигателем. Истоциики информации, принятые во внимание при экспе зтизе 1. Авторское свидеггел ьст во СССР If , . G 01 V 1/16, 1968, 05 2. Отчет темсЧтической партии ff 12/77 по теме Усовершенствование методики и техники трехкомпонентных наблюдений Сибирской геофизической экспедиции Миннефтепрома, ((овосиЬирсн: 1978 (прототип),
