соответствующими входами элемента ИЛИ выход которого соединен с входом первого распределителя импульсов, входом Сброс четвертого распределителя импульсов и с входом двоичного счетчика, выходы которого соединены с соответствующими входами дешифратора, выходы пятого распределителя импульсов соединены с соответствующими входами строчных элементов с зарядовой связью первой прямоугольной матрицы блока вывода трансформированного изображения, причем группы выходов Лоточувствитёльных приборов зарядовой инжекции каждого сектора квадратной матрицы соединены соответственно с первьыи входами элементов И каждой из групп, вторые входы которых подключены к соответствующим выходам третьего распределителя импульсов, а выходы элементов И групп соединены соответственно с входами столбцовых элементов с зарядовой связью прямоугольных матриц; блока вывода трансформированного изображения управляннцие входы второго, четвертого и пятого распределителей импульсов подключены к выходу генератора тактовых импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1982 |
|
SU1092535A1 |
| УСТРОЙСТВО ВВОДА | 2009 |
|
RU2410744C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ | 2010 |
|
RU2419151C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ | 2009 |
|
RU2408899C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2010 |
|
RU2431173C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2372640C1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| СПОСОБ НАВЕДЕНИЯ ГРУППЫ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2451317C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2008 |
|
RU2384010C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2401450C1 |
УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ, содержащее блок вводи исходного изображения, генератор тактовых импульсов, первый и второй распределителй.импульсов, двоичный счетчик и блок вывода трансформированного изображения, отличаю- щ е е с я тем, что, с целью повышения быстродействия, в него введены третий, четвертый и пятый распределители импульсов, дешифратор, элементы И, элемент ИЛИ и восемь групп элементов И, причем блок вьшода ; трансформированного изображения со- . держит восемь регистров, выполненных в виде прямоугольных матриц элементов с зарядовой связью, соединенных каскадно :трочными выходами со строчными Входами, a блок ввода исходного изображения выполнен в виде квадратной матрицы фоточувствитёль-ных приборов зарядовой инжекхщи, электрически разделенной на равные треугольные, обращенные вершинами к центру матрИЩ) секторы с первого по восьмой, в каждом из которых первый и второй входа строчных и столбцовых фоточувствительных приборов зарядовой инжекции объединены и образуют соответственно взаимно перпендикулярные группы горизонтальных и вертикальных тактовых DQffi, каждь выход первого распределителя импульсов соединен с соответствующими группа,9 ми горизонтальных тактовых шин первого, пятого, четвертого и восьмого секторов и с группами вертикальных тактовых юин второго, шестого, третьего и седьмого секторов, каждый вы§ ход второго распределителя импульсов соединен с соответствуимцими группами горизонтальных тактовых шин второго, шестого, третьего и седь 9 Ш 7 Э 1 мого секторов и, с группами вертикальных тактовых шин первого, пятого, четвертого и восьмого секторов, причем последний выход второго распределителя импульсов соединен с входами Сброс первого и второго распределителей импульсов и с входом третьего распределителя импульсов, последний выход которого соединен с входом Сброс третьего распределителя импульсов, a выходы четвертого распределителя импульсов соединены с первыми входами элементов И, вторые входы которых соединены с соответствующими выходами дешифратора, a выходы элементов И соединены с
Изобретение относится к аналоговой вычислительной технике и может быть использовано в различньк областях науки и техники, связанных с обработкой информации, представленной в виде двзл ерных оптических изображений .
Известны устройства для трансформации входного изображения из декартовых координат в полярные, содержащие сложные электронно-лучевые или оптико-электронные блоки координатной трансформации построчного сканирования Cl I
Однако такой Принцип координатной трансформаЩ1и существенно ограничивает быстродействие преобразователя координат,.
Наиболее близким к изобретению является устройство, содержащее блок ввода исходного изображения, блок вывода трансформированного изображения, генератор тактовых импульсов распределители, счетчик. Блок координатной трансформации выполнен в виде блока нелинейной электроннолучевой развертки 2 3.
В известном преобразователе координат требуется высокая скорость переадресации электронного луча, с целью обеспечения возможности работы устройства в реальном масштабе времени, что связано со значительными техническими трудностями. Кроме того, нелинейное сканирование вызывает
нежелательную амплитудную модуляцию выходного сигнала. Это происходит потому, что все отклоняющие системы (дефлекторы) являются детекторами
5 энергии, при этом интенсивность пропорциональна току электронного луча я обратно пропорциональна скорости сканирования. Все это вызывает необходимость усложнения устройства, на0 пример применение метода гамма-коррекции для компенсации этих искажений. В таком режиме практически трудно осуществима координатная трансформация в реальном ;масштабе времени..
S Целью изобретения является повышение быстродействия устройства.
Указанная цель достигается тем, что в устройство для преобразования координат, содержащее блок ввода ис0 ходного изображения, генератор тактовых импульсов, первый и второй распределители импульсов, двоичный счетчик и блок вьшода трансформированного изобраясения, введены тре5 тий, четвертый и пятый распределители импульсов, дешифратор, элементы И, элемент ИЛИ и восемь групп элементов И, причем блок вьгоода трансформированного изображения содержит
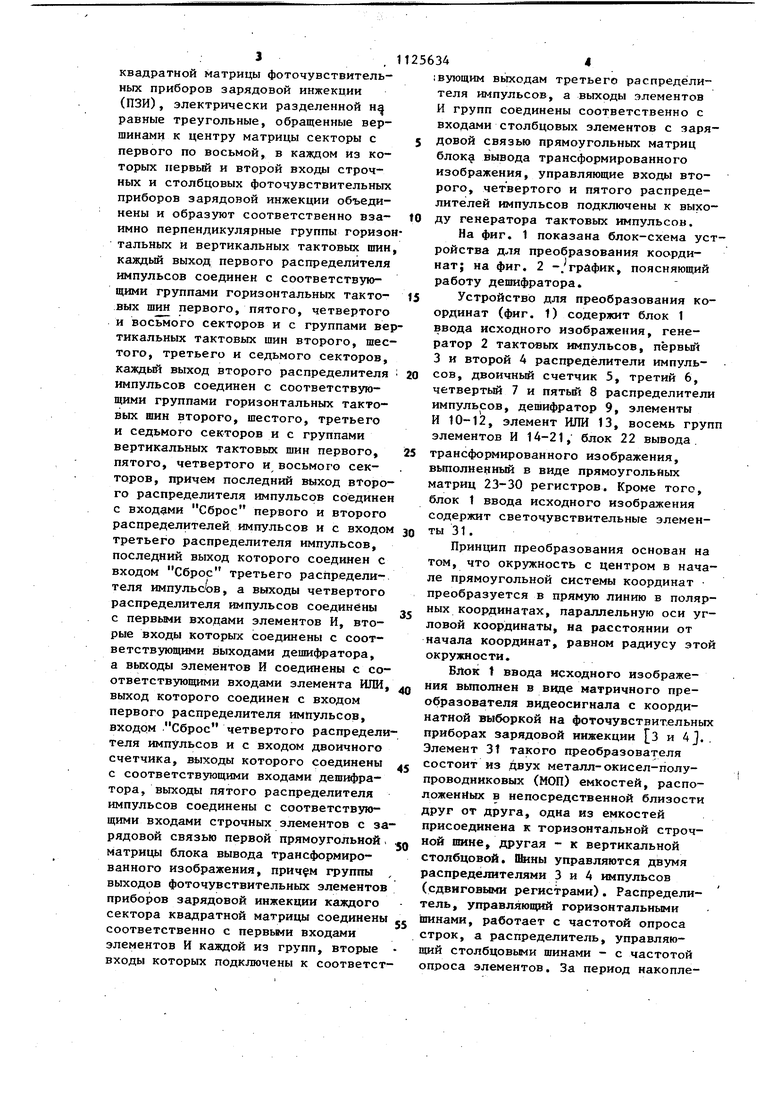
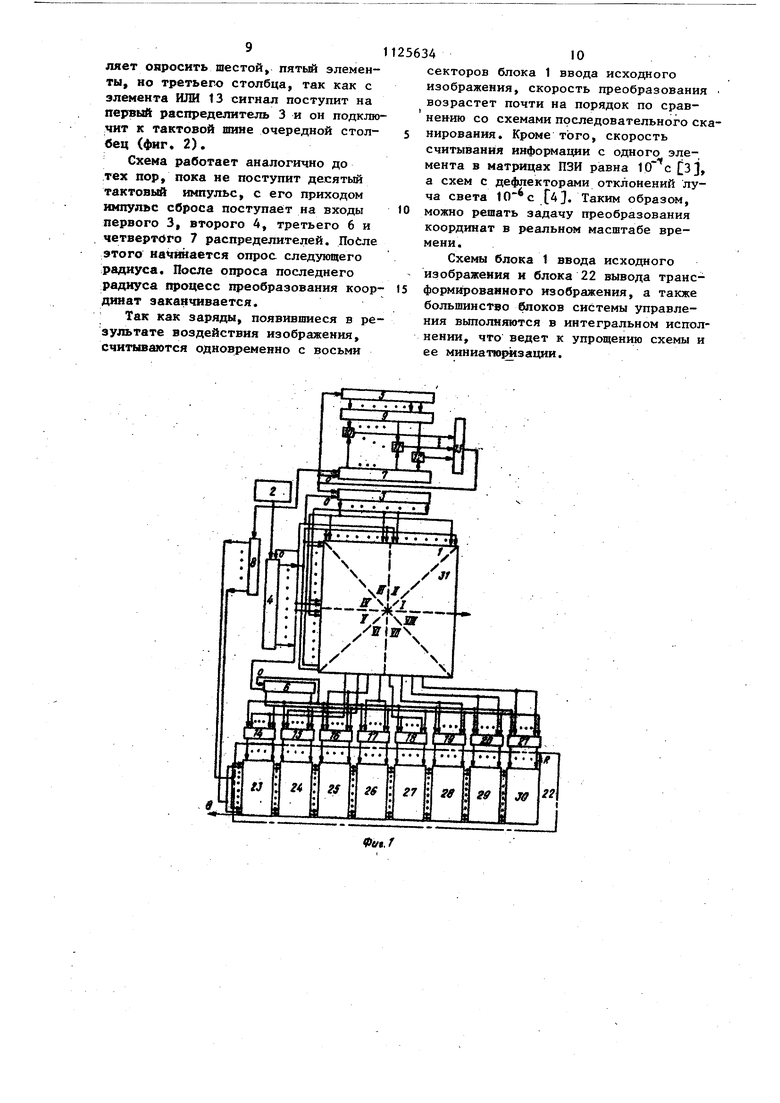
0 восемь регистров, выполненных в виде прямоугольных матриц элементов с зарядовой связью, соединенных каскадно строчными выходами со строчньми входами, а блок ввода ис ходного изображения выполнен в виде квадратной матрицы фоточувствительных приборов зарядовой инжекции (ПЗИ), электрически разделенной н равные треугольные, обращенные вершинами к центру матрицы секторы с первого по восьмой, в каждом из ко- торьпс первый и второй входы строчных и столбцовых фоточувствительных приборов зарядовой инжекции объединены и образуют соответственно взаимно перпендикулярные группы горизон тальных и вертикальных тактовых шин каждый выход первого распределителя импульсов соединен с соответствующими группами горизонтальных тактовых шин первого, пятого, четвертого и BOCbiMoro секторов и с группами вер тикальных тактовых шин второго, шестого, третьего и седьмого секторов, каждый выход второго распределителя импульсов соединен с соответствующими группами горизонтальных тактовых шин второго, шестого, третьего и седьмого секторов и с группами вертикальных тактовых шин первого, пятого, четвертого и восьмого секторов, причем последний выход второго распределителя импульсов соединен с входами Сброс первого и второго распределителей импульсов и с входом третьего распределителя импульсов, последний выход которого соединен с входом Сброс третьего распределителя импульсов, а выходы четвертого распределителя импульсов соединены с первыми входами элементов И, вторые входы которых соединены с соответствующими выходами дешифратора, а выходы элементов И соединены с соответствующими входами элемента ШШ, выход которого соединен с входом первого распределителя импульсов, входом Сброс четвертого распредели теля импульсов и с входом двоичного счетчика, выходы которого соединены с соответствующими входами дешифратора, выходы пятого распределителя импульсов соединены с соответствующими входами строчных элементов с за рядовой связью первой прямоугольной матрицы блока вывода трансформированного изображения, причем группы выходов фоточувствительных элементов приборов зарядовой инжекции каждого сектора квадратной матрицы соединены соответственно с первьми входами элементов И каждой из групп, вторые входы которых подключены к соответст 1вующим выходам третьего распределителя импульсов, а выходы элементов И групп соединены соответственно с входами столбцовых элементов с зарядовой связью прямоугольных матриц блока вывода трансформированного изображения, управляющие входы второго, четвертого и пятого распределителей импульсов подключены к выходу генератора тактовых импульсов. На фиг. 1 показана блок-схема устройства для преобразования координат; на фиг. 2 -/график, поясняющий работу дешифратора. Устройство для преобразования координат (фиг. 1) содержит блок 1 ввода исходного изображения, генератор 2 тактовых импульсов, пёрвьвЧ 3 и второй 4 распределители импульсов, двоичный счетчик 5, третий 6, четвертый 7 и пятый 8 распределители импульсов, дешифратор 9, элементы И 10-12, элемент ИЛИ 13, восемь групп элементов И 14-21, блок 22 вывода, трансформированного изображения, выполненный в виде прямоугольных матриц 23-30 регистров. Кроме того, блок 1 ввода исходного изображения содержит светочувствительные элементы 3 1 . Принцип преобразования основан на том, что окружность с центром в начале прямоугольной системы координат преобразуется в прямую линию в полярных координатах, параллельную оси угловой координаты, на расстоянии от начала координат, равном радиусу этой окружности. Блок 1 ввода исходного изображения выполнен в виде матричного преобразователя видеосигнала с координатной выборкой на фоточувствительных приборах зарядовой инжекции З и 4j.. Элемент 3t такого преобразователя состоит из двух металл-окисел-полупроводниковых (МОП) емкостей, расположенных в непосредственной близости друг от друга, одна из емкостей присоединена к горизонтальной строчной шине, другая - к вертикальной столбцовой. ПЬны управляются двумя распределителями 3 и 4 импульсов (сдвиговыми регистрами). Распределитель, управляющий горизонтальными шинами, работает с частотой опроса строк, а распределитель, управляющий столбцовьми шинами - с частотой опроса элементов. За период накопления заряды собираются в емкостях строчных шин, на которые подано обедняющее смещение. Считывание информации осуществляется методом параллельной инжекции, который позволяет разделить во времени операции считывания и инжекдии заряда 5J. При использовании неразрушающего считьшания операцию инжекции исключают.
Приемное поле блока 1 ввода исходного изображения разбивается на восемь секторов, подложки которых электрически изолированы друг от друга и образуют входные светочувствительные подматрицы фотоприборов зарядовой инжекции
Исходное изображение проецируется на светочувствительные элементы 31 блока 1 ввода исходного изображения (фиг. t). Заряды, появившиеся в результате воздействия света, считывгиотся одновременно с восьми секторов при поочередной подаче тактовых импульсов с первого распределителя 3 импульсов на горизонтальные тактовые шины первого, четвертого, пятого, восьмого секторов и вертикальные тактовые шины вторЪго,третьего, шестого, седьмого секторов, а с второго распределителя 4 импульсов на горизонтальные тактовые шины первого, четвертого, пятого, восьмого секторов блока 1 ввода исходного изображения.
Тактовые импульсы поступают с генератора 2 тактовых импульсов на входы второго 4, пятого 8, четвертого 7 распределителей импульсов. Тактовые Ю1пульсы далее с выходов второго распределителя 4 поступают на соответствзтещие горизонтальные и вертикальные шины блока 1 ввода исходного изображения, с последнего выхода второго распределителя 4 тактовый импульс поступает на входы сброса в исходное состояние первого 3, второго 4 распределителей и на вход
третьего распределителя 6, I
Тактовый импульс, поступающий с
последнего выхода второго распредели теля 4, несет информацию об -окончании опроса очередного радиуса в восьми секторах блока 1 ввода исходного изображения.
Тактовые импульсы с выходов пятограспределителя импульсов 8 поступают на тактовые шины блока 22 вывода трансформированного изображения.
Импульсы, поступающие с выходов третьего-распределителя 6, открывают поочередно элементы И 14-21, через которые с выходов восьми секторов поступают несущие инфЪрмацию о распределении интенсивнрстей изображения на опрашиваемом радиусе блока 1 ввода исходного изображения заряды, поочередно записываемые в соответствующие каждому опрашиваемому радиусу строки матрицы 23-30.
Таким образом, после опроса всех радиусов в восьми секторах блока 1 ввода исходного изображения информация о распределении интенсивностей изображения последовательно записывается в полярных координатах в матрицах 23-30 регистров.
Причем оси полярных координат R и б направлены таким образом, как показано на фиг 1.
Рассмотрим алгоритм снятия информации с одного из восьми секторов блока 1 ввода исходного изображения, алгоритмы снятия информации с других секторов аналогичны.
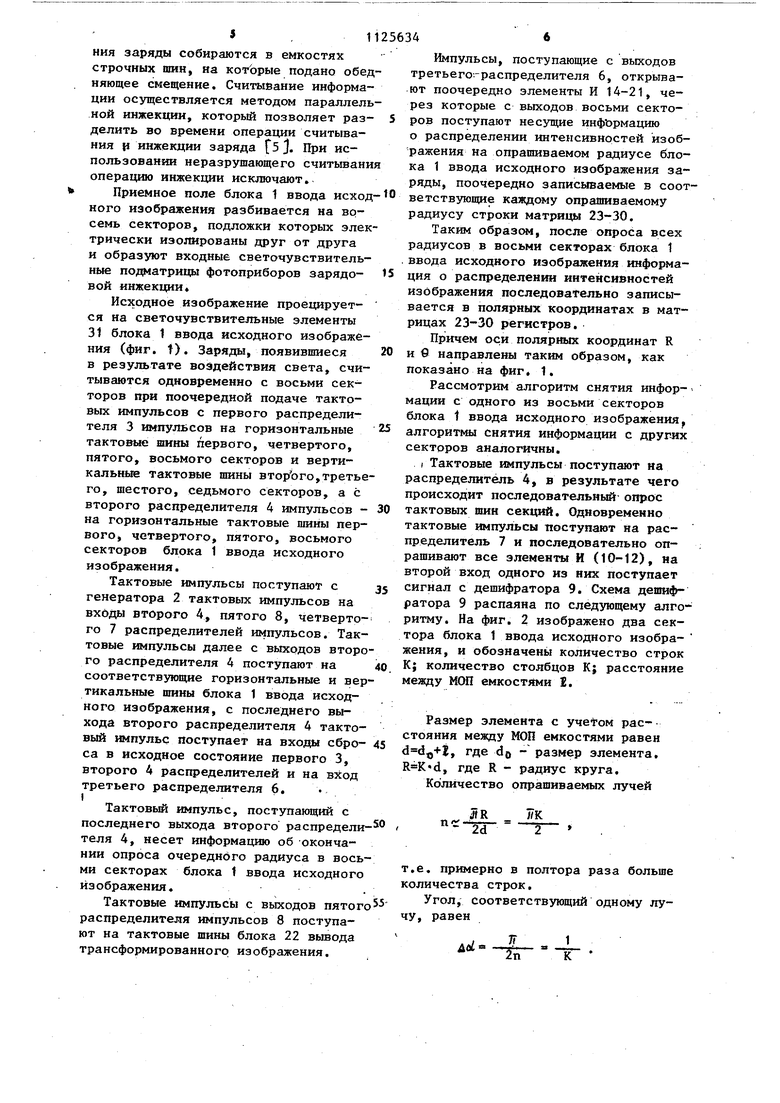
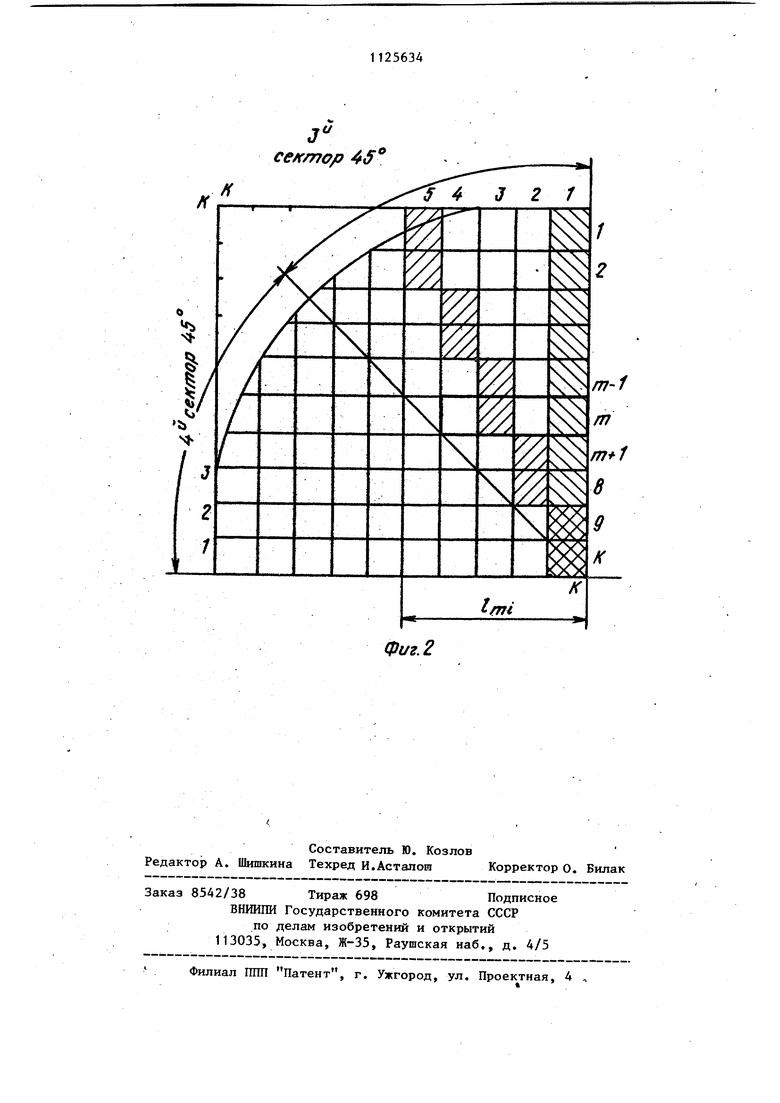
I Тактовые импульсы поступают на распределитель 4, в результате чего происходит последовательный опрос тактовых шин секций. Одновременно тактовые импульсы поступают на распределитель 7 и последовательно опрашивают все злементы И (10-12), на второй вход одного из них поступает сигнал с дешифратора 9. Схема дешифратора 9 распаяна по следующему алгоритму. На фиг. 2 изображено два сектора блока 1 ввода исходного изображения, и обозначены количество строк К; количество столбцов К; расстояние между МОП емкостями I.
Размер элемента с учетом расстояния между МОП емкостями равен , где do - размер элемента. , где R - радиус круга.
Количество опрашиваемых лучей
IIК
JfR .е. примерно в полтора раза больше количества строк.
Угол, соответствующий одному лучу, равен
7Г 1
Adi lifT ЛГ Расстояние по вертикали от центр круга до т-й строки (K-m) d. Длина m-й строки 1 (K-ii,)d.tgot . где df - угол, соответствующий т-й строке. Количество лучей, пересекающих т-ю строку, равно п„ Количество элементов в т-й строк 1т (К-т tgol. Обозначим I расстояние от точк /пересечения i-м лучом т-й строки До оси ординат. Разлагая tgЯ{ в ря и беря первые три члена разложения« получим г. 9 5e,-., )(т (взятие большего числа членов разло жения не ведет к Изменению алгоритма работы дешифратора). Для получения коэффициентов депв ратора необходимо высчитать 1. дпя всех строк и взять целую iacTb Номер элемента, подключаемого к дешифратору, определяется зависимос тью Ь где j - L целая часть числа. Для первого, третьего, пятого, восьмого секторов N - это номер подключаемого .элемента, отсчитывае мый по оси абсцисс, am- вертикаль ная строка, для второго, третьего, шестого, седьмого секторов N - это номер подключаемого элемента, отсчи тываемьй по оси ординат, am- гори зонтальная строка. Рассмотрим в качестве примера ра боту дешифратора Г третьей секцией (фиг, 2), Пусть К а 10, тогда для первого радиуса () получим .-™1, для пятого радиуса () N,t; 3; N,4; т.е. при опрашивается первый вертикальный столбец (на фиг. 2 он заштрихован). Таким образом, при опросе первого радиуса со счетчика 5 сигнал на дешифратор 9 не поступает, но с дешифратора 9 подается сигнал только на элемент И 12 в течение всего опроса радиуса. На другой вход элемента И 12 поступает импульс с распределителя 7 в момент опроса последнего элемента первого радиуса. Распределитель 3 в течение опроса радиуса запитывает первую считывательную шину. Сигнал для элемента И 12 через элемент ИЛИ 13 поступит на счетчик 5, сбросит в нулевое состояние распределитель 7,и поступит на распределитель 3, но в этот же момент с выхода распределителя 4 сигнал сброса в нулевое положение постзтаит на выходы первого 3 и второго 4 распределителей, т.е.- опрос первого радиуса окончен. С выхода счетчика 5 сигнал о том, что необходимо опрашивать второй радиус, т.е. , поступает на дешифратор 9, который и подает сигнал на вход одного из элементов И согласно алгоритму рдботы; таким образом схема готова к опросу второго радиуса. Рассмотрим работу схемы для случая, когда опрашивается например, пять радиус. Схема счетчика уже отсчитала четьфе такта работы (опросы четырех радиусов) и выдала сигнал на дешифратор 9, которьй будет работать согласно алгоритму для пятого радиуса (), т.е. с поступлением четырех тактовых импульсов на распределитель 4 происходит опрос элементов 10 и 9 третьей секции (фиг.2), с приходом четвертого импульса сигнал Содного из элементов И (10-12) через элемент ИЛИ 13 поступает на счетчик 5, а через него - на дешифратор 9, подключает следующий элемент И и позволяет опросить распределители 8 и 7 (фиг. 2), но второго столбца, так как сигнал с элемента ИЛИ 13 поступает на первый распределитель 3 и он подключает второй столбец к ,шине питания. При проходе восьмог-о тактового импульса сигнал с элемента И (подключенного ранее) поступает на элемент tJIH 13 и с него - на счетчик 5, а через счетчик 5 - на дешифратор 9, который подключает очередной элемент И и позво9
ляет опросить шестой пятый элементы, но третьего столбца, так как с элемента ИЛИ 13 сигнал поступит на первый распределитель 3 и он подключит к тактовой шине очередной столбец (фиг. 2).
Схема работает аналогично до тех пор пока не поступит десятый тактовый импульс, с его приходом импульс сброса поступает на входы первого 3, второго 4, третьего 6 и четвертого 7 распределителей. Побле этого наряжается опрос следующего радиуса. После опроса последнего радиуса процесс преобразования координат заканчивается.
Так как заряды, появившиеся в результате воздействия изображения, считываются одновременно с восьми
563410
секторов блока 1 ввода исходного изображения, скорость преобразования возрастет почти на порядок по сравнению со схемами последовательного ска5 нирования. Кроме того, скорость
считывания информации с одного элемента в матрицах ПЗИ равна 10 с а схем с дефлекторами отклонений луча света 10 с 4j. Таким образом, 10 можно решать задачу преобразования координат в реальном масштабе времени.
Схемы блока 1 ввода исходного - изображения и блока 22 вывода транс15 формированного изображения, а также большинство блоков системы управления выполняются в интегральном исполнении, что ведет к упрощению схемы и ее миниатюризации.
ce/f/7 o/y 4ff
4 321
w
2
YA
/r
IfTfi
Фиг. 2
