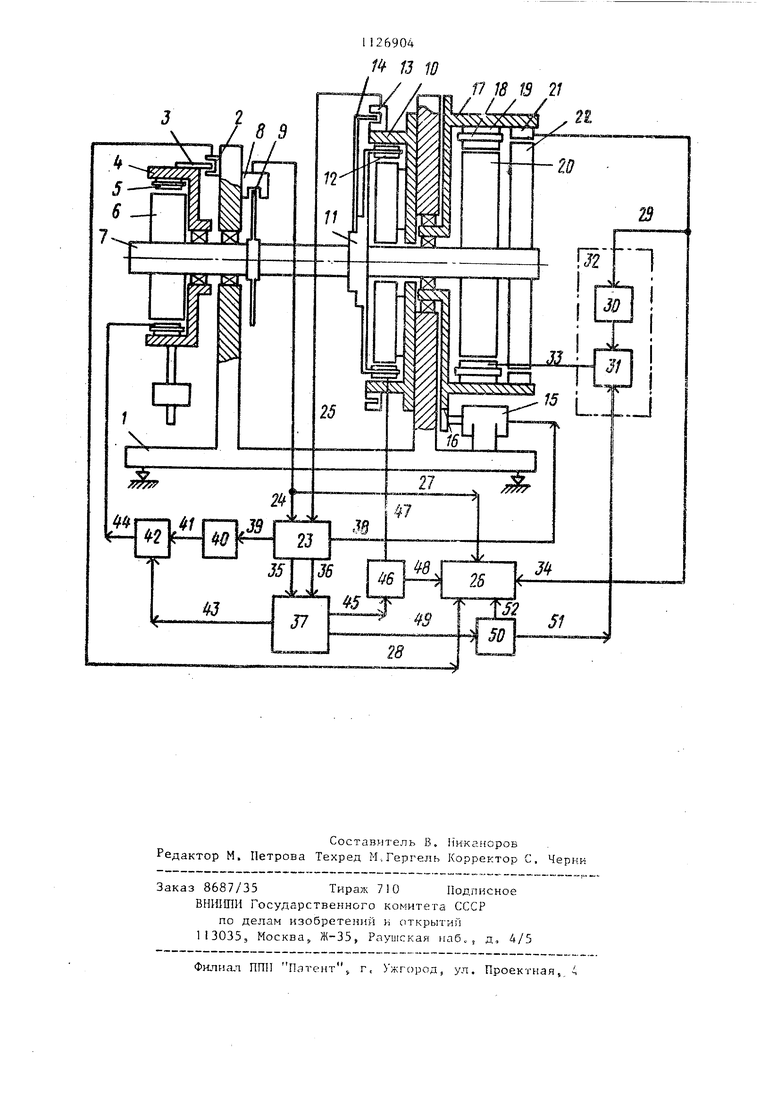
Изобретение относится к электричес ким машинам и измерительной технике и может найти широкое применение для исследования характеристики бесконтактного двигателя постоянного тока; пульсаций пускового момента, механичес кой характеристики для определения формы питающего исследуемый электродвигатель тока, исключающей пульсации пускового момента, для измерения характеристик исследуемого электродвигателя при изменении момента нагрузки на его валу в функции частоты вращени или угла поворота вала. Известно устройство,предназначен ное для определения зависимости часто ты вращения вала исследуемого электро двигателя от момента нагрузки на его валу, содержащее основание, нагрузочное устройство с датчиком угла,датчик частоты вращенияу управляемый источни питания и схему управления ij . Однако это устройство имеет ограни ченные функциональные возможности, та как определяет только механические характеристики исследуемого электродвигателя. Известно устройство для измерения пульсаций пускового момента бесконтактного электродвигателя постоянного тока, содержащее узел нагружения, источник питания, регистратор момента и задатчик положения ротора относительно статора двигателя, выполненный в виде механоэлектрическ.ого преобразователя, выход которого электрически связан с входом испытуемого двигателя и регистратором,а вход - с источником питания,причем вал двигателя постоянного тока механически связан с ротором механоэлектрического преобразователя pj . Функциональные возможности этого устройства ограничены измерением пуль сации пускового момента. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для исследования бесконтактного электродвигателя постоянного тока, содержащее корпус, установленный на нем приводной двигатель, ротор которого через редуктор связан со статором иссле дуемого электродвигателя, блок нагруз ки, ротор которого соединен с валом исслед уемого электродвигателя, а статор установлен с возможностью свободного вращения относительно вала иссле дуемого электродвигателя, первый датчик угла, статор которого соединен с корпусом, а ротор - со статором блока нагрузки, второй датчик угла, схему управления исследуемым электродвигателем, состоящую из логического блока, усилителя мощности и датчика положения ротора, первый управляемый Источник питания, выход которого соединен с управляющей обмоткой блока нагрузки, второй управляемый источник питания, первьй выход которого соединен с усилителем мощности схемы управления исследуемого электродвигателя, функциональный преобразователь и многовходовой регистратор, к входам которого подключены первый датчик угла и второй выход второго управляемого источника питания з . Однако при использовании данного устройства приходится затрачива.ть много времени на исследования, поскольку для исследования каждой характеристики приходится производить переналадку устройства с введением ряда дополнительных блоков измерения. Цель изобретения - сокращение времени на испытание. I Поставленная цель достигается тем, что в устройство для исследования бескон- актного электродвигателя постоянного тока, содержащее корпус, установленный на нем приводной двигатель, ротор которого через редуктор связан со статором .исследуемого электродвигателя, блок нагрузки, ротор которого соединен с валом иссле- . дуемого электродвигателя, а статор установлен с возможностью свободного вращения относительно вала исследуемого электродвигателя, первьпЧ датчик угла, статор которого соединен с корпусом, а ротор - со статором блока нагрузки, второй датчик угла, схему управления исследуемым электродвигателем, состоящую из логического блока, усилителя мощности и датчика положения ротора, первый управляемый источник питания, выход которого соединен с управляющей обмоткой блока нагрузки, второй управляемый источник питания, выход которого соединен с усилителем мощности схемы управления исследуемого электродвигателя, функциональный преобразователь и многовходовой регистратор, введены датчик частоты вращения, датчик момента, дополнительный управляемый источник питания, схема управления и коммутатор режимов работы, а первьш и второй управляемые источники питания снабже ны дополнительными входами управлени при этом статор датчика частоты вращенкя соединен с корпусом, а ротор с валом исследуемого электродвигател ротор датчика момента соединен с валом электродвигателя и ротором второго датчика угла, а статор связан с корпусом и статором второго датчика угла, первый выход дополнительного управляемого источника питания подклочен к обмотке управления датчика момента, а второй выход соединен с одним из входов регистратора, первый выход схемы управления подсоединен к дополнительному входу первого управляемого источника питания, второй выход соединен с входом дополнительного управляемого источника питания, а третий выход - с дополнительным вх дом второго управляемого источника п тания, первьш 5ХОД коммутатора режимов оаботы подключен к выходу датчика частоты вращения, второй вход - к выходу второго датчика угла, а его выходы соединены соответственно с первым и вторым входами схемы управления, приводным двигателем и входом функционального преобразователя, причем выход функционального преобра зователя соединен с первым входом первого управляемого источника питания а выходы датчика частоты вращения и датчика положения ротора соеди нень5 с входами регистратора. На чертеже представлено устройств ,для исследования бесконтактного двигателя постоянного тока. Устройство содержит керпус 1, Йа котором установлен статор 2 первого датчика угла, ротор 3 которого соеди нен со статором 4 блока нагрузки. Первый датчик угла предназначен для определения угла поворота статора 4 блока нагрузки относительно корпуса На статоре 4 блока нагрузки уложена обмотка 5 управления. Ротор 6 блока нагрузки закреплен на валу 7. Блок нагрузки предназначен для создания момента нагрузки на валу 7. Угол пов рота статора 4 блока нагрузки, свободно вращающегося вокруг вала 7 вмес те с закрепленным на нем ротором 3 первого датчика угла, определяет момент нагрузки, приложенный к валу 7. На корпусе 1 установлен статор 8 датчика частоты вращения, ротор 9 которого жестко связан с валом 7. Датчик частоты вращения предназначен для определения частоты вращения вала 7. На корпусе 1 установлен также статор 10 датчика момента, ротор 11 которого жестко соединен с валом 7, На роторе I1 датчика момента уложена обмотка 12 управления. Датчик момента предназначен для создания компенсирующего момента на валу 7. На статоре 10 датчика момента установлен стато.р 13 второго датчика угла ротор 14 которого жёстко соединен с ротором 1I датчика момента о Второй -хатчик угла предназначен для измерения угла поворота ротора 11 датчика момента относительно статора 10, На Koptiyce 1 установлен приводной двигатель 15, выходной вал которого через редуктор 16 связан с корпусом 17, имеющем возможность свободно вращаться вокруг вала 7. В корпусе 17 установлен статор 18 исследуемого электродвигателя. Б последнем уложена обмотка 19и Ротор 20 исследуемого электродвигателя жестко связан с валом 7, В корпусе 17 установлен статор 21 датчика положения ротора, ротор 22 которого жестко связан с валом 7, Датчик положения ротора, в качестве которого может использоваться, например, преобразователь угол - код, предназначен для измерения угла поворота корпуса 17 с установленным в кем статором 18 исследуемого электродвигателя относительно вала 7 с закpeплeнны на нем ротором 20 исследуемого электродвигателя. На парвый вход коммутатора 23 режимов работы по цепи 24 поступает выходкой сигнсШ датчика частоты вращения, а на второй вход по цепи 25 выходной сигнал второго датчика угла. Выходной сигнал датчика частоты вращения поступает также на первый вход регистратора 26 по цепи 27 Выходной сигнал первого датчика Угла по депи 28 поступает на второй вход регистратора 26. Выходной сигнал датчика положения ротора по цепи 29 поступает на вход логического блока 30, выход которой соединен с входом усилителя 31 мощности схемы 32 управления электродвигателем Выход усилителя 31 мощности S11 по цепи 33 соединен с обмоткой 19 статора 18 исследуемого электродвигателя. По цепи 34 выходной сигнал датчика йоложения ротора поступает на третий вход регистратора 26. Первьш и второй выходы коммутатора 23 режимов работы по цепям 35 и 36 со единены соответственно с первым и вто рым входами схемы 37 управления. Третий выход коммутатора 23 режимов работы соединен по цепи 38 с приводным двигателем 15, а четвертый выход по цепи 39 - с функциональным преобразователем 40 Выход функционального преобразователя 40 по цепи 4I соединен с первым входом первого управляемого источника 42 питания, второй вход которого по цепи 43 соединен с первым выходом схемы 37 управления. Выход первого управляемого источника 42 питания по цепи 44 соединен с обмоткой 5 управле ния, расположенной на статоре 4 нагру зочного устройства. Второй выход схемы 37 управления по цепи 45 соединен с входом дополнительного управляемого источника 46 питания, первый выход которого по це пи 47 Соединен с обмоткой 12 управления датчика момента а второй выход по цепи 48 - с четвертым входом регистратора 26о Третий выход схемы J7 управления по цепи 49 соединен с вхо дом второго управляемого источника 50 питания, первый выход которого по цепи 51 соединен с вторым входом уси лителя 31 мощности схемы 32 управления электродвигателем,-а второй выход по цепи 52 соединен с пятым входом регистратора 26 Предлагаемое устройство может работать в четырех режимах: определение зависимости величины пульсаций пускового момента электродвигателя в функции угла поворота статора при неподвижном роторе, которая идентична зависимости пульсаций пускового момента от угла поворота ротора при неподвижном статоре, но при обратном направлении вращения ротора; определение зависимости от угла поворота статора относительно неподвижного ротора . формы питающего исследуемый электродвигатель тока, при котором обеспечивается отсутствие пульсаций пускового v 55 тор
момента исследуемого электродвигателяj определение механических характеристик исследуемого электродвигателя; форми45 схемой 37 управления таким обра зон, чтобы свести к нулю выходной сигнал с второго датчика угла, поступающий по цепи 27 через коммутасхему 37 управления. По цепи 48 на регистратор 26 с дополнительного управляемого источника 46 питания по4рование заданного закона изменения момента нагрузки на валу исследуемого злектродвигателя в зависимости от частоты вращения или угла поворота вала исследуемого электродвигателя. В .режиме измерения пульсаций пускового момента исследуемого двигателя в зависимости от угла поворота статора коммутатор 23 режимов работы по цепи 38 подает питание на приводной двигатель 15, подключает цепь 25 выходного сигнала второго датчика угла через цепь 36 к схеме 37 управления. Выходные сигналы с первого датчика угла - цепь 28, датчика частоты вращения - цепь 24, цепь 27, функциональный преобразователь 40, первый управляемьм источник 42 отключены и в работе в режиме измерения пульсаций пускового момента не участвуют. В исходном состоянии схема 37 управления по цепи 49 задает постоянную величину питания на выходе второго управляемого источника 50 питания, которая по цепи 51 поступает на усилитель 3 мощности схемы 32 управления исследуемого электродвигателя. Информация с датчика положения ротора по цепи 29 поступает на логическое устройство 30 схемы 32 управления электродвигателем и по цепи 34 на регистратор 26. Логическое устройство 30 управляет работой усилителя 31 мощности, опре деляя закон изменения его выходного напряжения в соответствии с положением статора 18 исследуемого электродвигателя относительно ротора 20. Выходное напояжение с усилителя 31 мош- нпсти по цепи 33 поступает на обмотку 19 статора исследуемого электродвигателя. Создается вращающий момент, который гтри.пожен к валу 7., Этот момент урявнпвешива ется моментом, вырабатываемым датчиком момента и определяемый величиной тока в обмотке 12 управления датчика момента питающейся от дополнительного упрггйляемого источника 46 питания по цепи 47. Выходной ток дополнительного источника 46 питания регулируется по цепи 23 режимов работы и цепь 36 на 711 ступает информация о величине тока в управляющей обмотке 12 определяющая величину пускового момента, развиваемого электродвигателем, При вращении.вала приводного двигателя 15 через редуктор 16 приводится вр вращение корпус 17 с установлен ньпи в нем статором 18 исследуемого электродвигателя При изменении взаимного положения статора 18 и готова 20.меняется величина момента, оязвивяемого электоодвигятелем. Вал 7 начи нает поворачиваться, а вместе с ним ротор 11 датчика момента и ротор I4 второго датчика угла. На выходе второго датчика угла появляется сигнал рассогласования, который по цепи 27 через коммутатор 23 режимов работы и цепь 36 поступает на схему 37 управления. Схема 37 управления вырабатывает управляющий сигнал который по цепи 45 поступает на вход дополнительного управляемого источника 46 питания и регулирует ток на его выходе и далее через цепь 47 ток в управляющей обмотке I2 датчика момента, а следовательно, и момент, развиваемый датчиком, таким образом, чтобы свести сигнал рассогласования второго датчика угла к нулю и тем самым уравновесить момент, развиваемый исследуемым электродвигателем. Инфор мация об изменении выходного тока дополнительного управляемого источни ка 46 питания по цепи 48, а информация об угле поворота сгатора с датчи ка положения ротора по цепи 34 посту пает на регистратор 26, которьш фиксирует зависимость пускового момента исследуемого электродвигателя в функ ции угла поворота статора при неподвижном роторе, так как в устройстве постоянно происходит слежение за положением ротора 20 с TeMj чтобы он оставался на месте, а съем информации производится при равенстве нулю выходного сигнала второго датчика уг ла. Полученная зависимость аналогичн зависимости пускового момента исследуемого электродвигателя в функции угла поворота ротора 20 при неподвиж ном статоре 18, но при обратном вращении ротора 20. В режиме определения формы питающего электродвигатель тока в функции угла поворота статора относительно ротора, исключающего пульсации пуско вого момента, коммутатор 23 режимов 4 работы переключает цепь 25 выходного сигнала второго датчика угла на цепь 35, по которой сигнал поступает на схему 37 управления. В исходном состоянии схема 37 управления через цепь 45 задает на выходе дополнительного управляемого источника 46 питания постоянную величину тока, который через цепь 47 поступает на управляющую обмотку 12 датчика момента. Датчик момента развивает постоянный момент, который через ротор 1I датчика момента действует на вал 7. Это момент уравновешивается моментом развиваемым электродвигателем. Момент исследуемого электродвигателя задается током, протекающим в обмотке 19 статора и поступающим по цепи 33 от усилителя 31 мощности, Работой усилителя 31 мощности управляет логическим блпк 30, на вхпд котоолгп по цепи 29 подается сигнал с датчика положения олторя. Величина тока пи- тающего обмотку 19 статора исследуемого электродвигателя, определяется током, поступающим на усилитель мощности по цепи 51 от второго управляемого источника 50 питания. Величина тока задается управляющ сигналом, поступающим i;o цепи 49 от схемы 37 упг равления на второй управляемый источник 50 питания. Управляющий сигнал вырабатывается в схеме 37 управления путем обработки выходного сигнала второго датчика угла, поступающего по цепи 25 через коммутатор 23 режимов работы и по цепи 35. Момент исследуемого электродвигателя D результате работы схемы 37 управления устанавливается таким. чтобы скомпенсировать момент, развиваемый дитчиком момента, и уменьшить выходной сигнал второго датчика угла до нуля. Сигнал, пропорциональный току, протекающему в обмотке 19 статора исследуемого электродвигателя, от второго источника 50 питания по цепи 52 поступает на регистратор 26. На регистратор 26 по цепи 34 с датчика положения ротора поступает информация об угле поворота статора 18 исследуемого электродвигателя относительно ротора 20. При вращении вала приводного электродвигателя 15 через редуктор 16 приводится во вращение корпус 17 с,установленным в нем статором 18 исследу91126904
ёмого электродвигателя. Равновесие моментов нарушается, вал 7 начинает
поворачиваться. Вместе с ним повора5ивается ротор 11 датчика момента и
ротор 14 второго датчика угла. На вы- 5 блок ЗО, который вырабатывает управходе второго датчика угла появляется сигнал рассогласования, которьш по цепи 25 через ког 1мутатор 23 режимов работы и цепь 35 поступает на схему 37 управления. 37 управления в рабатывает управляющий сигнал, который по цепи 49 поступает на второй регулируемый источник 50 питания и устанавливает на его выходе TOKV который, поступая по цепи 51 на усилитель 31 мощно.сти и от него по цепи 33 на обмотку 19 статора исследуемого электродвигателя создает момент компенсирующий поворот вала 7 и сводя щий выходной сигнал ВТОРОГО датчика угла к нулю„ Информация об изменении тока плта ния обмотки 19 статора исследуемого электродвигателя поступает по цепи 52 от второго управляемого источника 50 питания, а информация об угле поворота статора с датчика положениярото ра по цепи 34 поступает на регистратор 26, кц торый фиксирует зависимость тока питания обмотки 19 статора исследуемого электродвигателя в функции угла поворота статора 18 при постоянНом млкенте на валу 7 и неподвижном роторе 20, так как в устройстве постоянно гфоисходйт слежение за положанием ротора 20 с тем, что он оставался на месте, а съем информации производится при равенстве- ну-пю выходно го сигнала второго датчика угла. Полученная зависимость аналогична зависимости тока питания обмотки 19 статора в функции угла поворота ротора 20 при неподвижном статоре 18 но при обратном вращении ротора 20, В режиме определения механических характеристик исследуемого электродви гателя коммутатор 23 режимов работы отключает цепь 38 питания приводного двигателя 15 отключает цепь 25 выходного второго датчика угла от схемы 37 управления Схема управления отключает питание управляющей обмотки 12 датчика момента по цепр 47 путем воздействия на дополни тельный управляемый источник 46 питания по цепи 45 и устанавливает по цепи 49 на выходе второго управляемо го источника 50 питания постоянное
напряжение, которое по цепи 51 поступает на усилитель 31 мощности. Вьжодной сигнал с датчика положения ротора по цепи 29 поступает на логический ляю1щие сигналы и подает их на усилитель 31 мощности. По цепи 33 усилитель мощности осуществляет питание обмоток I9 статора исследуемого двигателя. Ротор 20 приходит во вращение. Вместе с ротором 20 вращаются и ротор б блока нагрузки. Сигнал о частоте вращения по цепи 27 поступает с датчика частоты вращения на.регистратор 26, Схема 37 управления вырабатьшает управляющий сигнал и по цепи 43 подает на его первый управляемьй источник 42 питания, на выходе которого в соответствии с уп равляющим сигналом устанавливается величина тока и по цепи 44 поступает на обмотку 5 статора блока нагрузки. Блок нагрузки создает Момент на вращающемся валу 7, что приводит к по вороту статора блока нагрузки Угол поворота пррпорционапен моменту itaгрузки и регистрируется первым датщтком угла, выходной сигнал которого по цепи 28 поступает-на регистратор 26 Меняя момент нагрузки на вращающемся валу 7 путем изменения величины тока в обмотке 5 статора 5 блока нагрузки, которьш поступает по цепи 44 с первого управляемого источника 42 питания и задается по цепи 43 со скемы 37 управления, и регистрируя СИГН5Л о частоте враю;ения вала 7, исступающий с датчика частоты врап ения по цепи 27J и сигнал с первого датчика угла, поступающий по цепи 28 на регистратор 26. получаем вид механической характеристики исследуемого электродвигателя. В режиме моделирования характера нагрузки на вращающемся в.1лу исследуемого электродвигателя ког мутатор 23 режимов работы подает по цепи 39 на вход функционального преобразователя 40 выходной сигн.ал датчик;; скорости поступагйфй по цепч 24 на. вход коммутаторг, .или выходной сигнал с второго датчика угла посту1Тс-:юш.ий на вход коммутатора по цепи 25, Сигнал с датчика частоты вращения гю.г.ается на вход функционального ,.оГ разователя 40 если необходимо реализовать закон изменения мом&нта нагрузки на вращающемся, валу 7 в фуь;киии частоты вращения вала, а сигнал с второго датчика угла подается на.вход функци онального преобразователя 40 если необходимо реализовать закон изменения момента нагрузки на вращающемся валу 7 в функции угла поворота вала. Выгодной сигнал функционального преобразоват ля АО по цепи А1 поступает на вход первого управляемо го источника А2 питания. Управляющий сигнал по цепи 43 на вход первого управляемого источника 42 питания со схемь 37 управления в данном режиме работы не поступает. При вращении вала 7 выходной сигнал датчика скорости или вьлсодной сигнал второго датчика угла по цепи 24 или 25 поступает через коммутатор 23 по цепи 39 на вход функционального преобразователя 40, выходной сигнял котооого по цепи 41 поступает на первый управляемый источник 42 питания. Первый управляемый источник питания по цепи 44 меняет питание обмотки статора 6 нагрузочного устройства, а следовательно, и мо1412 мент нагрузки на валу 7 в функции частоты вращёния или угла поворота вала 7. Величина момента нагрузки регистрируется первым датчиком угла по углу поворота статора 4 блока нагрузки. Выходной сигнал с первого датчика угла, пропорциональный изменению момента нагрузки на валу 7, по цепи 28 поступает на регистратор 26, куда поступает также сигнал о частоте вращения вала по цепи 27 с датчика частоты вращения и сигнал об угле поворота вала 7 с датчика положения ротора по цепи 34. Предлагаемое устройство позволяет измерить несколько характеристик бесконтактного двигателя постоянного тока, что сокращает материальные затраты на изготовление измерительных устройств, так как обычно для измерения каждой из характеристик изготовляются отдельные устройства, содержащие общие функциональные элементы, а также сократить время на проведение эксперимента. 1126904 /4 13 W /„ T} 18 13 / SSS5 21
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА | 2012 |
|
RU2499984C1 |
| Устройство для исследования опор гиродвигателя | 1978 |
|
SU783585A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Вентильный электродвигатель | 1983 |
|
SU1150725A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| Вентильный электродвигатель | 1982 |
|
SU1065979A1 |
| Вентильный электропривод | 1988 |
|
SU1677837A1 |
| Система регулирования тока возбуждения для муфты скольжения | 1979 |
|
SU917302A1 |
УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ БЕСКОНТАКТНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА, содержащее корпус, установленный на нем приводной двигатель, ротор которого через редуктор связан со статором исследуемого электродвигателя, блок нагрузки, ротор которого соединен с валом исследуемого электродвигателя, а статор установлен с возможностью свободного вращения относительно вала исследуемого электродвигателя, первый датчик угла, статор которого соединен с корпусом, а ротор - со статором блока нагрузки, второй датчик угла, схему управления исследуемым электродвигателем, состоящую из логического блока, усилитег-я мощности и датчика положения ротора, первый управляемый источник питания, выход которого соединен с управляющей обмоткой блока нагрузки, второй упрс:вляемый источник питания, выход которого соединен с усилителем мощности схемы управления исследуемого электродвигателя, функци.ональный преобразователь и многовходовой регистратор, отличающ е е с я тем, что, с целью сокращения времени на исследования, в него введены датчик частоты вращения, датчик момента, дополнительный управляемый источник питания, схема управления и коммутатор режимов работы, а первый 1 второй управляемые источники питания снабжены дополнительными входами управления, при этом статор датчика частоты вращения соединен с корпусом, а ротор - с валом исследуемого электродвигателя, ротор датчика момента соединен с валом электродвигателя и ротором второго датчика угла, а статор связан с корпусом и статором второго датчика угла, первый выход дополнительного управляемого источника питания подключен к обмотке управления датчика момента, а С второй выход соединен с одним из входов регистратора, первый выход схемы управления подсоединен к дополнительному входу первого управляемого источника питания, второй выход соединен с входом дополнительного управляю емого источника питания, а третий Од выход - с дополнительным входом втосо о рого управляемого источника питания, первый вход коммутатора режимов рабо4 ты подключен к выходу датчика частоты вращения, второй вход - к выходу второго датчика угла, а его выходы соединены соответственно с первым и вторым входами схемы управления, приводным двигателем и входом функционального преобразователя, причем выход функционального преобразователя соединен с первым входом первого управляемого источника питания, а выходы датчика .частоты вращения и датчика положения ро тора соединены с входами регистратора
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| А., Юферов Ф | |||
| М | |||
| Измерение вращающих моментов и скоростей вращения микроэлектродвигателёй | |||
| М., Энергия, 1974, с„ 64-65 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
