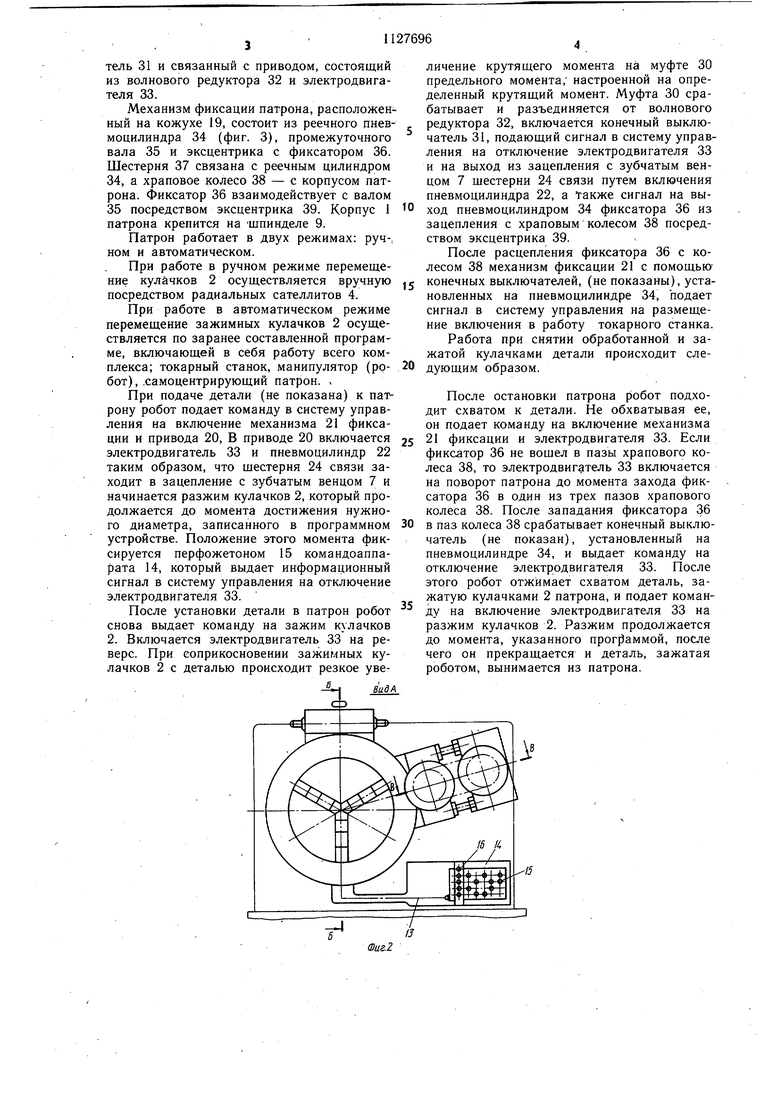
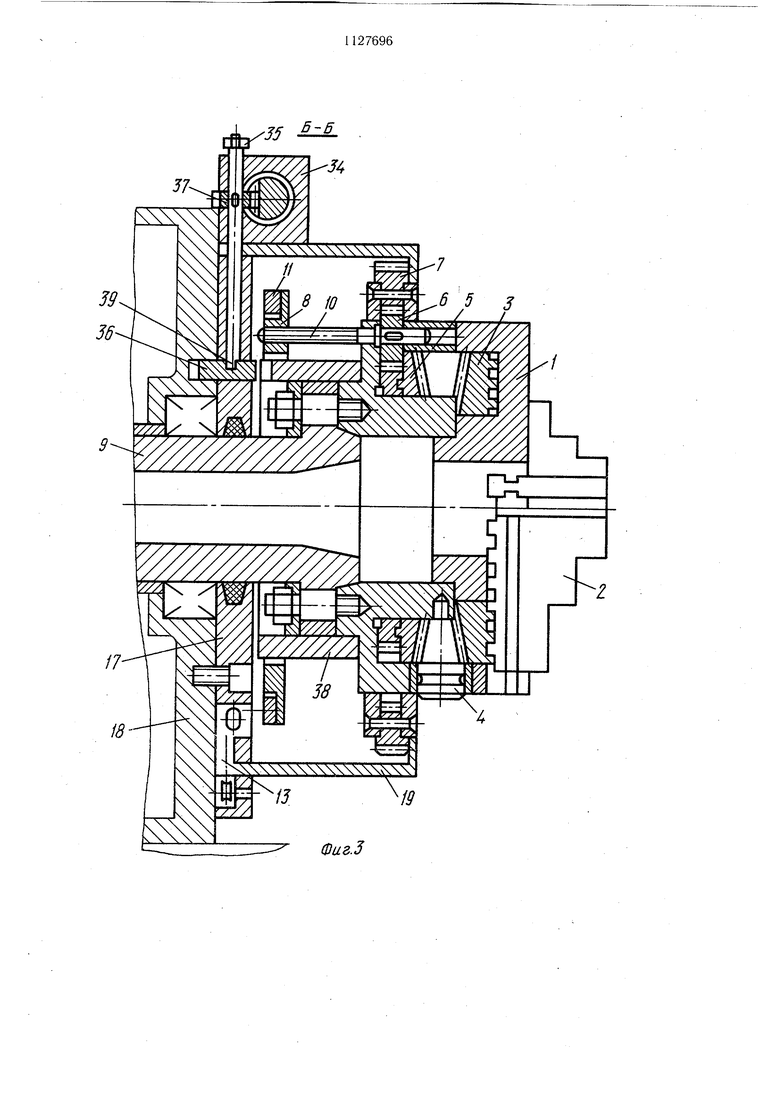
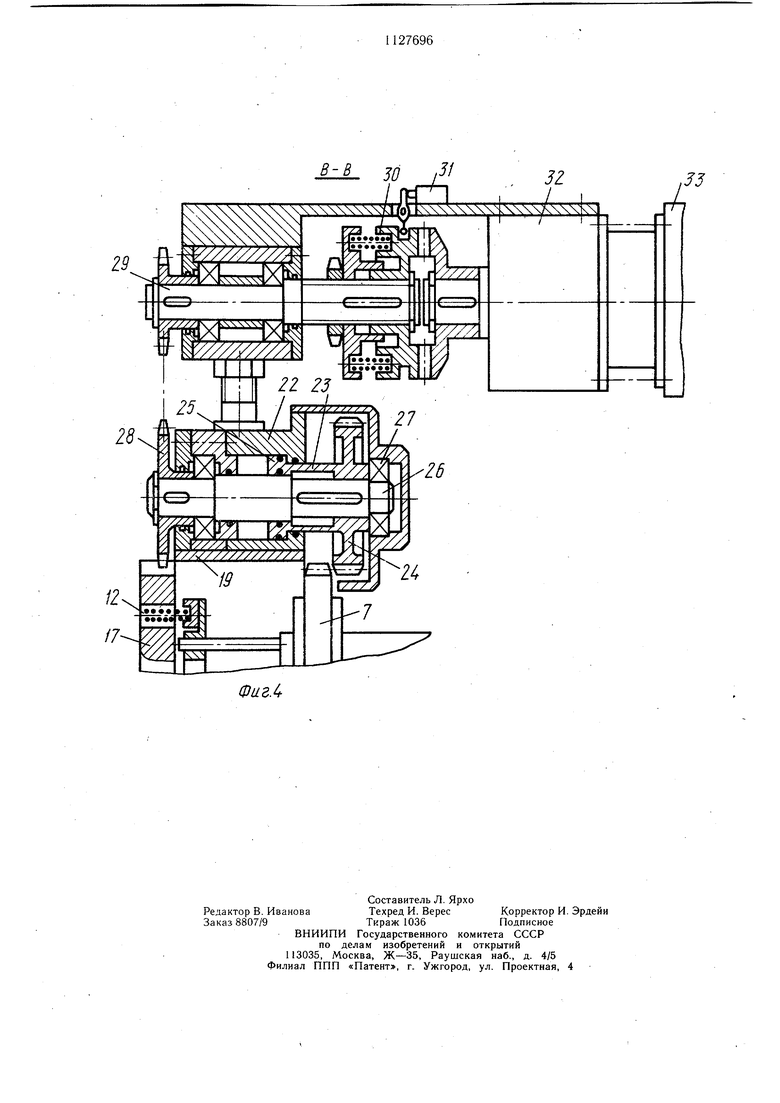
Изобретение относится к обработке материалов резанием, а именно к устройствам для станков с числовым программным управлением, обслуживаемых манипуляторами. Известно зажимное устройство, содержащее самоцентрирующий токарный патрон, установленный на передней бабке со спирально-реечным механизмом перемещения зажимных кулачков 1. Недостатком указанного устройства является ручное перемещение зажимных кулачков. Наиболее близким к H3o6peteHHro является зажимное устройство, содержащее самоцентрирующий токарный патрон, установленный на передней бабке станка, в корпусе которого расположен спирально-реечный механизм перемещения зажимных кулачков, кинематически связанный с приводом. и механизм фиксации патрона 2. Недостатком известного патрона является невозможность его работы в автоматическом цикле совместно с манипуляторами./ Целью изобретения является автоматизация работы патрона совместно с манипуляторами на станках с числовым программным управлением. Указанная цель достигается тем, что зажимное устройство, содержащее самоцентрирующий токарный патрон, установлен«ый на передней бабке в корпусе которого расположен спирально-реечный механизм перемещения зажимных кулачков, кинематически связанный с приводом, и механизм фиксации патрона, снабжено кинематически связанными со спирально-реечным механизмом и приводом патрона продольными сателлитами с осями, имеющими резьбовой хвостовик, подпружиненным относительно передней бабки информационным кольцом и командоаппаратом, причем информационное кольцо установлено на резьбовых хвостовиках осей продольных сателлитов и кинематически связано с командоаппаратом, а механизм фиксации выполнен в виде установленного неподвижно относительно передней бабки пневмоцилиндра, эксцентрика, кинематически связанного со штоком пневмоцилиндра, закрепленного на корпусе патрона храпового колеса и фиксатора, установленного на передней бабке с возможностью взаимодействия посредством эксцентрика с храповым колесом. Такое выполнение патрона обеспечивает автоматическую его работу на станках с числовым программным управлением совместно с манипуляторами. На фиг. I изображен патрон, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2. Патрон состоит из корпуса 1, в радиальных пазах которого расположены зажимные кулачки 2, улики 3, спиральным зубом входящие в зацепление с зажимными кулачками 2 и перемещающие их. Радиальные сателлиты 4 служат для ручного привода зажимных кулачков, а блок-щестерни 5 являются связующим звеном между радиальными 4 и продольными 6 сателлитами. Сателлиты 6 служат Для выдачи информации о положении зажимных кулачков 2 за пределы корпуса 1 патрона. Зубчатый венец 7 является связующим звеном между сателлитами и приводом патрона, а информационное кольцо 8 перемещается относительно шпинделя 9 по резьбовому хвостовику оси 10 сателлитов 6 при синхронном вращении от зубчатого венца 7. Подпружиненное кольцо 11 контактирует с информационным кольцом 8 за счет пружин 12 (фиг. 4) причем контакт происходит по деревянному кольцу, укрепленному на кольце 11 (не показано) с целью уменьщения сил трения и создания благоприятного теплового режима, возникающего от скольжения придаращении информационного кольца 8. Гибкий элемент 13 связан через систему роликов с командоаппаратом 14, имеющим подвижный посредством гибкого элемента 13 перфожетон 15 и фотоэлект ронную систему 16, выдающую информационные сигналы о перемещении перфожетона 15 в систему программного управления патрона 7непоказаноТ.перфожетонТ5 перфорирован таким образом, что весь диапазон хода перфожетона 15, равный максимальному ходу зажимных кулачков 2, разбит на ряд перекрывающих друг друга рабочих зон, в каждой из которых согласно заданной системой управления программой происходит движение зажимных кулачков 2. Кольцо 17, устанавливаемое на передней бабке станка 18, служит основанием для размещеня на нем остальных частей патрона. Кожух 19, укрепленный на пальце 17, служит для защиты и является основанием для размещения на нем привода 20 и механизма 21 фиксации патрона (фиг. 1). Привод 20 патрона состоит из пневмоцилиндра 22 (фиг. 4), укрепленного на кожухе 19 и имеющего два штока: подвижный в осевом направлении шток 23, на внешней стороне которого расположена шестерня 24 связи с зубчатым венцом 7, а на внутренней стороне в цилиндре - поршень 25 и неподвижный в осевом направлении шток 26 с внутренней стороны цилиндра 22 связанный шпоночным соединением с подвижным штоком 23. Расположенный на подшипниковых опорах 27 и связанный цепной передачей 28 с промежуточным валом 26 соединен с регулируемой муфтой 30 предельного момента, имеющей конечный выключатель 31 и связанный с приводом, состоящий из волнового редуктора 32 и электродвигателя 33.
Механизм фиксации патрона, расположенный на кожухе 19, состоит из реечного пневмоцилиндра 34 (фиг. 3), промежуточного вала 35 и эксцентрика с фиксатором 36. Шестерня 37 связана с реечным цилиндром 34, а храповое колесо 38 - с корпусом патрона. Фиксатор 36 взаимодействует с валом 35 посредством эксцентрика 39. Корпус 1 патрона крепится на шпинделе 9.
Патрон работает в двух режимах: руч-, ном и автоматическом.
При работе в ручном режиме перемещение кулачков 2 осуществляется вручную посредством радиальных сателлитов 4.
При работе в автоматическом режиме перемещение зажимных кулачков 2 осуществляется по заранее составленной программе, включающей в себя работу всего комплекса; токарный станок, манипулятор (робот), .самоцентрирующий патрон. ,
При подаче детали (не показана) к патрону робот подает команду в систему управления на включение механизма 21 фиксации и привода 20, В приводе 20 включается электродвигатель 33 и пневмоцилиндр 22 таким образом, что щестерня 24 связи заходит в зацепление с зубчатым венцом 7 и начинается разжим кулачков 2, который продолжается до момента достижения нужного диаметра, записанного в программном устройстве. Положение этого момента фиксируется перфожетоном 15 командоаппарата 14, который выдает информационный сигнал в систему управления на отключение электродвигателя 33.
После установки детали в патрон робот снова выдает команду на зажим кулачков 2. Включается электродвигатель 33 на реверс. При соприкосновении зажимных кулачков 2 с деталью происходит резкое увеличение крутящего момента на муфте 30 предельного момента, настроенной на определенный крутящий момент. Муфта 30 срабатывает и разъединяется от волнового , редуктора 32, включается конечный выключатель 31, подающий сигнал в систему управления на отключение электродвигателя 33 и на выход из зацепления с зубчатым венцом 7 щестерни 24 связи путем включения пневмоцилиндра 22, а также сигнал на вы ход пневмоцилиндром 34 фиксатора 36 из зацепления с храповым колесом 38 посредством эксцентрика 39.
После расцепления фиксатора 36 с колесом 38 механизм фиксации 21 с помощью5 конечных выключателей, (не показаны), установленных на пневмоцилиндре 34, подает сигнал в систему управления на размещение включения в работу токарного станка. Работа при снятии обработанной и зажатой кулачками детали происходит сле0 дующим образом.
После остановки патрона робот подходит схватом к детали. Не обхватывая ее, он подает команду на включение механизма
5 21 фиксации и электродвигателя 33. Если фиксатор 36 не вощел в пазы храпового колеса 38, то электродвигатель 33 включается на поворот патрона до момента захода фиксатора 36 в один из трех пазов храпового колеса 38. После западания фиксатора 36
в паз колеса 38 срабатывает конечный выключатель (не показан), установленный на пневмоцилиндре 34, и выдает команду на отключение электродвигателя 33. После этого робот отжимает схватом деталь, зажатую кулачками 2 патрона, и подает команду на включение электродвигателя 33 на разжим кулачков 2. Разжим продолжается до момента, указанного прог15аммой, после чего он прекращается и деталь, зажатая роботом, вынимается из патрона.
Фиг.З В-В JO
ФагЛ Jf
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для закрепления деталей | 1987 |
|
SU1442328A1 |
| Самоцентрирующийся патрон | 1985 |
|
SU1273216A1 |
| ТОКАРНЫЙ САМОЦЕНТРИРУЮЩИЙ ПАТРОН | 1990 |
|
RU2018415C1 |
| ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1968 |
|
SU209178A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПАТРОН | 1973 |
|
SU396193A1 |
| Зажимной патрон | 1990 |
|
SU1787072A3 |
| Самоцентрирующий электромеханический патрон | 1974 |
|
SU512005A1 |
| Устройство для центрирования изделия при зажиме | 1981 |
|
SU1000158A1 |
| Самоцентрирующий патрон | 1977 |
|
SU671935A1 |
| Токарный патрон | 1978 |
|
SU747034A1 |
ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ ТОКАРНОГО СТАНКА, содержащее самоцентрирующий патрон, установленный на передней бабке, в корпусе которого расположен спирально-реечный механизм перемещения зажимиых кулачков, кинематически связанный с приводом, и механизм фиксации патрона, отличающееся тем, что, с целью автоматизации работы, устройство снабжено кинематически связанными со спиральнореечным механизмом и приводом патрона продольными сателлитами с осями, имеющими резьбовой хвостовик, подпружиненным относительно передней бабки информационным кольцом и командоаппаратом, причем информационное кольцо установлено на резьбовых хвостовиках осей продольных сателлитов и кинематически связано с командоаппаратом, а механизм фиксации выполнен в виде установленного неподвижно относительно передней бабки пневмоцилиндра, эксцентрика, кинематически связанного с штоком пневмоцилиндра, закрепленного на корпусе I патрона храпового колеса и фиксатора, установленного на передней бабке с возможностью взаимодействия посредством эксцентрика с храповым колесом. ГчЭ 1 05 СО О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для перебрасывания челнока в ткацких станках силою сжатого воздуха или жидкости под давлением | 1917 |
|
SU2675A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Самоцентрирующий электромеханический патрон | 1978 |
|
SU776782A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
