2 « 7 915 6
Ju. NtИзобретение относится к станкостроению, в частности к устройствам для закрепления детали на щпинделе токарного станка, работающего в составе роботизированного токарного ,комплекса.
Цель изобретения - расширение тенологических возможностей патрона с одновременным упрощением обслуживающего токарный комплекс робота.
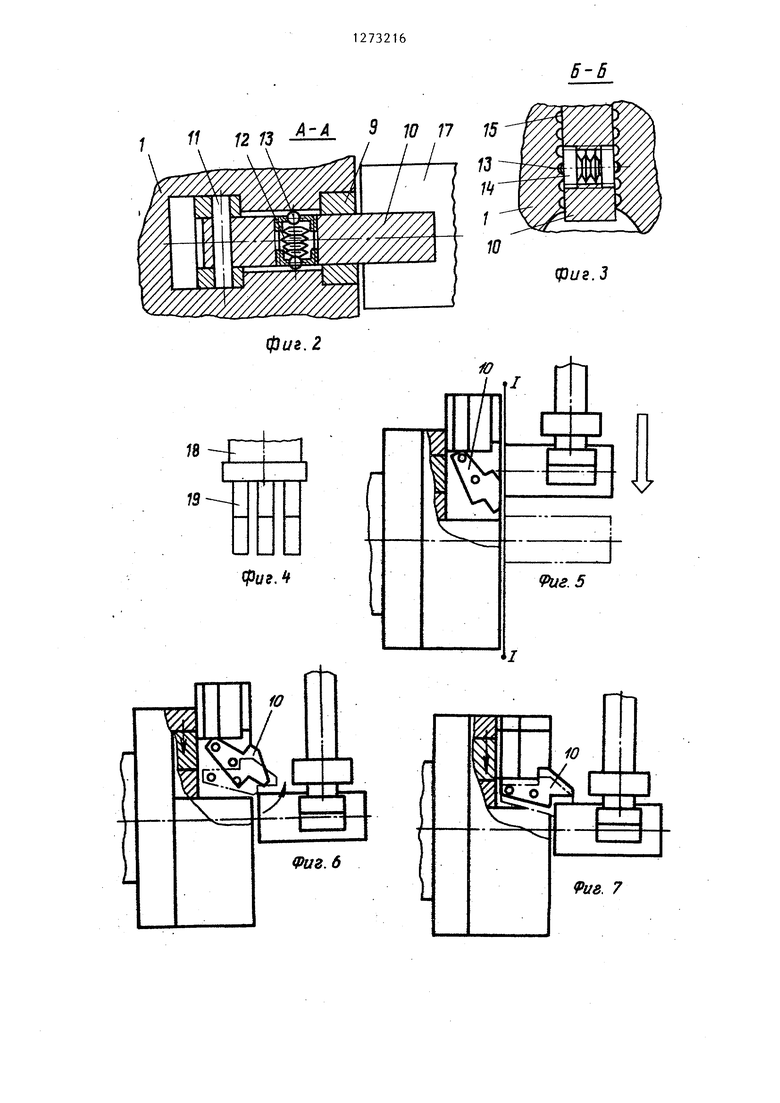
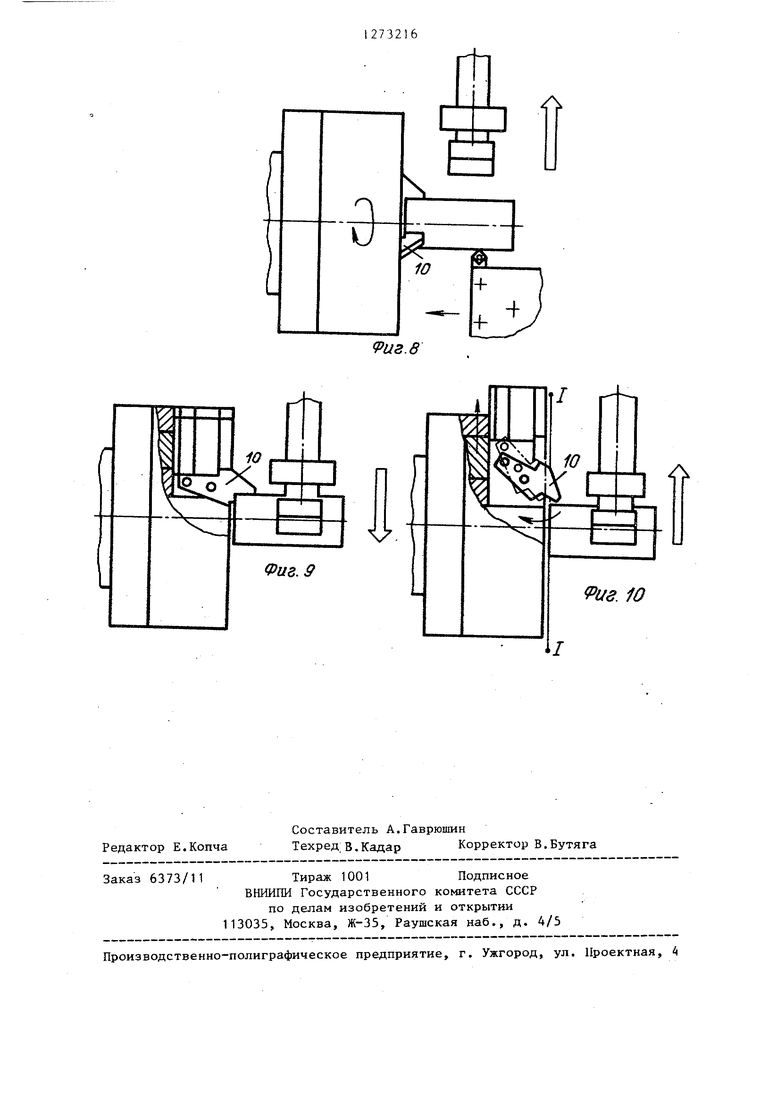
На фиг. 1 изображен патрон, осевой разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1i на фиг. 4 - охват робота на фиг. 5 - положение механизма патрона при подаче детали, на фиг. 6 то же, при смещении ползунов к детали; на фиг. 7 - то же, в момент зажима детали; на фиг. 8 - то же, при обработке детали; на фиг. 9 - захва детали роботом при зажатых рабочих кулачках; на фиг. 10 - положение механизмов патрона при разводе ползунов с последующим удалением детали роботом.
Самоцентрирующий патрон содержит корпус 1, через заднюю крышку 2 жестко крепящийся к шпинделю 3 токарного станка, надетое на корпус с возможностью вращения относительно него зубчатое кольцо 4, в прорези которого входит подвидимый согласно управляющей программе фиксатор. 5, снабженный злектромагнитным приводом. Зубчатое кольцо 4 кинематически связано через приводную шестерню 6 со спиральным диском 7, который, в свою очередь, связан с зубчатыми рейками зажимньгх кулачков пожвижно размещенных в направляющих радиальных пазах 8 корпуса патрона.
Каждый зажимной кулачок патрона вьшолнен сборным из подвижного в радиальном направлении ползуна 9, приводимого спирально-реечным механизмом, и поворотного рабочего кулачка 10, шарнирно закрепленного посредством оси 11 на ползуне, в котором выполнено специальное окно для размещения рабочего кулачка 10. В сквозном резьбовом отверстии в рабочем кулачке 10 установлен комплект тарельчатых пружин 12, распирающих в противоположные стороны два шарика 13, удерживаемых резьбовыми шайбами 14, сквозь отверстия которых они частично выступают и . входят в рифления 15, выполненные ввиде полуцилиндрических углублений в боковых стенках радиальных пазов корпуса с уклоном к переднему торцу патрона. Детали 12-14 и рифления 15 являются механизмом поворота рабочего кулачка 10.
Сухари снабжены скошенными базирующими упорами 16, которыми они сопряжены с торцом зажимаемой в патроне детали 17. Шайбы стопора выполняются в виде постоянных магнитов.
Для установки заготовки в патрон и снятия готовой детали служит промышленный робот, например смонтированный на передней бабке станка (не показан) с исполнительным органом 18, снабженным захватом 19.
Патрон работает следующим образом.
В исходном положении патрона перед его загрузкой очередной обрабабываемой деталью рабочие кулачки 10 повернуты в окнах ползунов 9 таким образом, что полностью утоплены за передний торец корпуса 1. Это позволяет беспрепятственно по кратчайшей траектории в плоскости 1-1, отстоящей от торца патрона на минимальное расстояние, исполнительному органу 18 промышяенного робота осуществить транспортирование детали 17 до совмещения ее оеи с осью патрона.
. включают привод зажима детали 17, для чего по программе, заданной станку, включают малые обороты шпинделя 3 И подводят посредством электромагнита, содержащегося в нем, фиксатор 5 к наружному зубчатому кольцу 4, которое до этого момента вращалось с корпусом 1 патрона. Фиксатор 5, западая в одну из прорезей кольда 4, притормаживает его, что приводит к вращению спирального диска 7 относительно корпуса 1, благодаря вращению приводной шестерни 6 5 от зубчатого кольца 4. Таким образом получают перемещение в радиальном направлении к центру патрона ползуны 9. При указанном перемещении последних рабочие кулачки 10 поворачи0 веются вокруг осей 11 .Благодаря взаимодействию шариков 13 с рифлениями 15 в боковых стенках радиальных направляющих пазов 8 корпуса возникает момент силы, обеспечивающий поворот рабочих кулачков 10, происходящий до упора в плоскости ползунов 9. После этого поворот рабочих кулачков 10 прекращается, они занимают крайнее
выступающее положение, т.е. выступают за торец корпуса 1, и готовы к зажиму детали 17.
В этом положении кулачки получают необходимую жесткость, так как рабочие кулачки 10 дополнительно опираются на две поверхности ползуна и фиксируются с двух сторон стенками пазов 8.
При дальнейшем смещении ползунов 9 рабочие кулачки 10 смещаются поступательно вместе с ними, сохраняя имеющееся положение, В этот период шарики 13 проскальзывают через углубления в боковых стенках пазов 8 корпуса, сжимая пружины 12. Усилие стопорения возрастает, если удерживающие шайбы 14 выполнены из магнитного материала в виде постоянных магнитов.
В момент касания зажимных поверхностей рабочих кулачков 10 обрабатываемой детали 17 происходит ее зажим до которого благодаря воздействию скошенньк базирукяцих упоров 16 на торец детали 17 осуществляется окончательное точное базирование ее в осевом направлении за счет некоторого отжатия захвата 19, который в этом случае целесообразно снабжать упругим компенсирую1цим элементом и опорными роликами.
По окончании зажима детали фиксатор 5 проскальзывает по кольцу 4 и затем отводится от патрона. Исполнительный орган 18 также освобождает деталь 17 и выходит из зоны обработки. Производится заданная программой обработка детали 17. После этого обработанная деталь 17 захватьгеается захватом 19, а патрону сообщают минимальную частоту вращения в обратном направлении. При подводе фиксатора 5 к наружному зубчатому кольцу 4 происходит разжим детали 17. Пол-; зуны 9 при этом расходятся от центра патрона, а рабочие кулачки 10 поворачиваются в направлении, противоположном первоначальному и уходят
внутрь корпуса 1, за его передний торец, освобождая деталь.
Поворот рабочих кулачков 10 на осях 11 также обусловлен воздействием рифлений 15 на подпружиненные шарики 13 при поступательном движении ползунов 9.
Выполнение рифлений 15 с уклоном к переднему торцу патрона облегчает поворот рабочих кулачков 10 в обоих направлениях.
Таким образом, патрон возвращается в исходное положение, готовая деталь 17 промышленным роботом такж по простой траектории в плоскости 1-1 выносится из зоны обработки, после чего цикл повторяется.
Формула изобретени
1. Самоцентрирующийся патрон для токарных роботизированных комплексо содержащий корпус, в пазах которого с возможностью возвратно-поступателного радиального перемещения устанолены ползуны с рабочими кулачками, отличающийся тем, что, с целью расширения технологических возможностей с одновременным упрощением робота комплекса, патрон снабжен механизмом поворота в осевой плоскости рабочих кулачков на ползунах, при этом на каждом рабочем кулачке выполнен базирующий скос.
2.Патрон по п. 1, отличающийся тем, что механизм поворота каждого рабочего курачка размещен в, выполненном в рабочем кулачке резьбовом отверстии и вьтолнен в виде комплекта тарельчатых пружин, замкнутого между двумя резьбовыми шайбами, в отверстиях которых размещены шарики, предназначенные для взаимодействия с выполненными в пазах рифлениями.
3.Патрон по п. 1, отличающийся тем, что, с целью повышения надежности в работе, резьбош е шайбы выполнены в виде постоянных магнитов. . Г/ /2 /3 /7 л
фиг. 2 75 физ.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Зажимной патрон | 1990 |
|
SU1787072A3 |
| Многокулачковый самоцентрирующий центробежный патрон | 1983 |
|
SU1093414A1 |
| Универсальный патрон | 1990 |
|
SU1814993A1 |
| Трехкулачковый самоцентрирующий патрон | 1983 |
|
SU1146137A1 |
| Робототехнологический комплекс | 1984 |
|
SU1202862A1 |
| Токарный самоцентрирующий клиновой патрон | 1983 |
|
SU1106594A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Токарный патрон | 1987 |
|
SU1569090A1 |
| Зажимной патрон | 1989 |
|
SU1683882A1 |
Изобретение относится к устройствам для закрепления детали на шпинделе токарного станка, работающего в составе роботизированного токарного комплекса. Целью изобретения является распшрение технологических возможностей с одновременным .упрощением робота, обслуживакяцего комплекс. В радиальных пазах 8 кор пуса 1 выполнены наклонные рифления 15. В пазах 8 перемещаются ползуны 9, на которых с возможностью поворота установлены рабочие кулачки 10. 8рабочих кулачках выполнены резьбовые отверстия, в которых посредством резьбовых шайб замкнут комплект тарельчатых пружин, воздействую:1 ;ий на шарики. При разведении ползунов 9рабочие кулачки 10 поворачиваются по часовой стрелке благодаря взаимодействию шариков 13 с рифлениями 15, освобождая тем самым рабочую зону для подачи детали 17 схватом робота. Затем ползуны 9 нечинают сходиться к центру, и кулачки 10 начинают но- ворачиваться против часовой стрелки, подготавливаясь к зажиму детали, СЛ который происходит при дальнейшем перемеш;ении ползунов к центру. После обработки детали ползуны отходят от центра и деталь освобождается.JО ил. г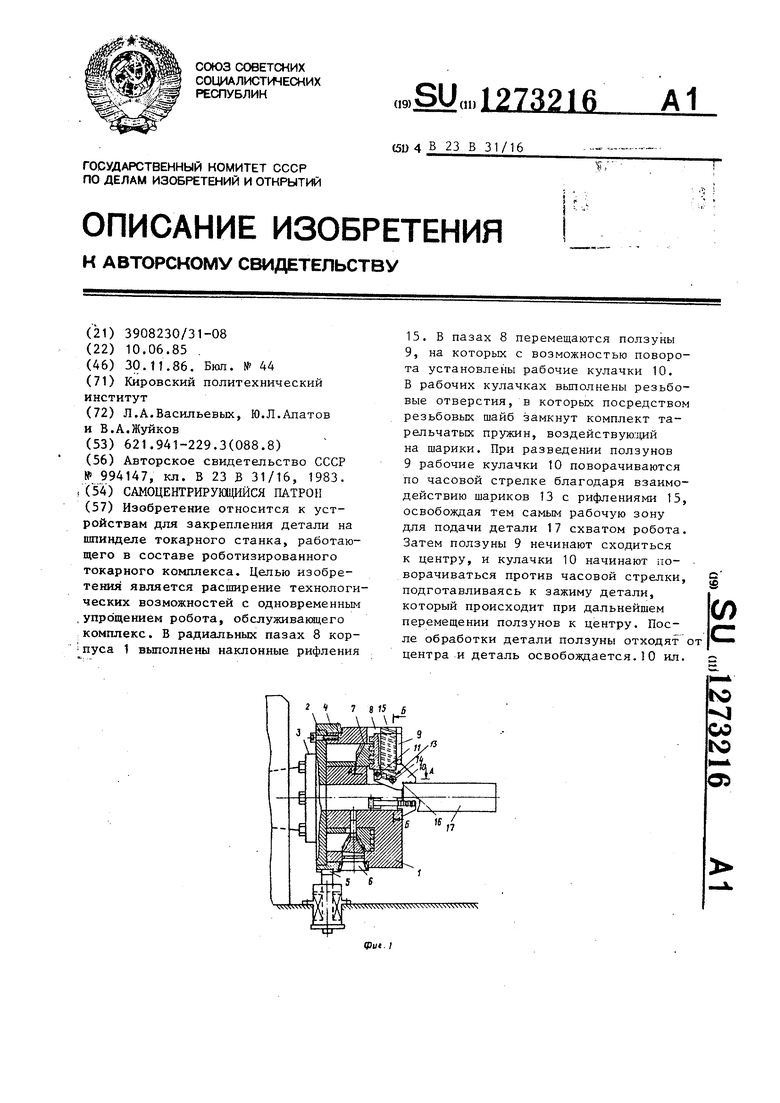
| Самоцентрирующий патрон | 1981 |
|
SU994147A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| , | |||
