Изобретение относится к методам нераэрушающего контроля физико-механических параметров изделий из ферромагнитных материалов и может быть использовано в машиностроительной промышленности для проверки качества изделий. Известно устройство для контроля физикомеханических свойств изделий, содержащее соединенные последовательно генератор, вихретоковый преобразователь, усилитель, детектор и индакатор. При работе устройства информации о механических свойствах изделия, пропорциональная величине намагничивающего тока, регистрируется индикатором 1 . Недостатком данного устройства является низкая достоверность контроля. Наиболее близким к изобретению является устройство контроля физико-механических показателей ферромагнитных изделий, содержащее соединенные последовательно блок управления, контроллер тока намагничивания, генератор тока намагничивания, первичный измери тельный преобразователь, блок аналого-цифрового преобразования и регистратор 2. Недостатком известного устройства являет ся низкая точность контроля при различных типах начальных параметров, подлежащих контролю. Целью изобретения является повышение точ ности контроля. Поставленная цель достигается тем, что уст ройство контроля физико-механических показателей ферромагнитных изделий, содержащее соединенные последовательно блок управления контроллер тока намагничивания, генератор тока намагничивания, первичный измерительный преобразователь и блок аналого-цифрового пр образования и регистратор, снабжено соединен ньпми последовательно блоком памяти дискретных отсчетов, блоком обмена и арифметическим . блоком, включенными между блоком ан лого-цифрового преобразования и .регистрато: ром, блоком оперативной памяти, подключенным к блоку обмена, первым блоком синхронизация, выходы которого соединены с арифметическим блоком и блоком оперативной памяти, блоком управления выборкой, включенным между блоком управления и блоком памяти дискретных отсчетов, соединенными последовательно блоком управления кратности, блоком зшравлення процедурой функционального преобразования, блоком управления и синхронизации и блоком хранения констант, выход которого подключен к блоку обмена, и вторым блоком синхронизации, подключенным к выходам блока управлення, блока управления и синхронизации и блока обмена к входу первого блока синхрюнизации, и соединенными последовательно блоком задатчиков, первым коммутатором, второй вход которого подключен, к второму блоку синхронизации, и вторым коммутатором, выход которого подключен к блоку обмена, и блоком весовых множителей, подключенным к второму входу второго коммутатора, а выходы блока управления процедурой функционального, преобразования и блока, управления и синхронизации подключены к первому блоку синхронизации, а входы блока управления и синхронизации и блока управления кратностью подключены к блоку управления. На чертеже представлена блок-схема устройства. Устройство контроля физико-механических показателей ферромагнитных изделий содержит соединенные последовательно контроллер тока намагничивания, генератор 2 намагничивания, первичный измерительный преобразователь 3, блок 4 аналого-цифрового преобразования, блок 5 памяти дискретных отсчетов, блок 6 обмена информации и блок 7 оперативной памяти, К блоку 6 обмена ин- , формации подключены соединенньге последовательно арифметический блок 8 и регистратор 9. Устройство содержит также блок 10 синхронизации, выходы которого подключены ко входам блока 7 оперативной памяти и арифметическому блоку 8, соединенные последовательно блок 11 управления и блок 12 управления выборкой, выход блока 11 управления, подключен к контролл.еру 1 тока намагничивания, а выход блока 12 управления выборкой - к блоку 5 памяти дискретных отсчетов. Устройство содержит также соединенные последовательно блок 13 управления кратностью, блок 14 управления процедурой функционального преобразования, блок 15 зшравления и синхронизации и блок 16 хранения констант, выход которого подключен к блоку 8 обмена информации. Входы управления блоков 13 и 15 управления кратностью и синхронизации подключены к выходу блока 11 управления, а выход блока 14 управления .процедурой функционального преобразования подключен к блоку 10 синхронизации. В составе устройства имеются также блок 17 синхронизации, входы которого соединены с выходами блока 15 управления и синхронизации, блока 11 управления и блока 6 обмена, а выход - с блоком 10 синхронизации, соединенные последовательно блок 18 задатчиков и коммутатор 19, второй вход которого соединен с блоком 17 синхронизации, и соединенные последовательно блок 20 весовых множителей и коммутатора 21, вход которого соединены с выходами блока 18 задатчиков и коммутатора 19, а выход подключен к блоку 6 обмена. Устройство работает следующим образом. Первоначально в цикле обучения на представительной обучающей выборке образцов осуществляется поиск оптимальной формы зондирующего воздействия на объект контроля, для чего, первоначально, контроллер 1 тока намагничивания обеспечивает на выходе ге нератора 2 намагничивания сину(1оидальную форму намагничивающего тока соответствующей амплитуды и частоты, а в дальнейщем ; устройство обеспечивает адаптивное регулирование формы намагничивающего тока на локальных временных интервалах анализа. При этом сигнал с выхода первичного измеритель ного преобразователя 3 поступает на вход блока 4 аналого-цифрового преобразования, где исходный аналоговый континуальный сигнал преобра1зуется в цифровую форму и пред ставляется на выходе последнего в виде дзоичного параллельного кода соответствующей разрядности, который в дальнейщем записывается в блок 5 памяти дисретных отсчетов. Частота дискретизации исходного сигнала первичного измерительного преобразователя 3 на интервале, равном периоду последнего, задается блоком 12 управления выборкой, при чем последний синхронизируется блоком 11 управления. По заверщении дискретизации исходного си нала первичного измерительного преобразователя 3 на указанном интервале блок 11 управления переключает работу устройства на. вычисление спектральных составляющих в .базисе тригонометрических функций. При этом блок 13 управлеиия кратностью обеспечивает в режиме Обучения поиск оптимальной формы зондирующего воздействия на объект контроля при использовании анализа измерительной информации на локальных временных интервалах различной кратности (с из менением во времени), а в цикле Измерения - функциональное преобразование исходного сообщения. В качестве исходной кратности анализа измерительной ииформации использзпот двоичный локальный временной интервал, равный четверти периода, переключая его в дапьнейщем в устройстве блоком 13 управления кратностью на более высокую кратность двоичного локального интервала, используемого для анализа исходного преобразованного сообщения. Кроме того, указанный блок после осуществления дискретизации исходного сигнала на соответствующих локальных шггервалах анализа обеспечивает в совокупности с блоком 12 управления функциональное преобразование исходного сообщения, осуществляя при зтом на указанных интервалах анализа определение минимального значения сигнала, принимая в дальнейщем последнее значение за пьедестал. При этом из абсолютных значений дискретных выборок, принадлежащих анализируемому интервалу, вычИтают пьедестал, а в далънейщем для данного интервала вычисляют площадь преобразованного сигнала. Для получения априорных сведений об объекте контроля используется обзд1ающая выборка образцов, при этом вычисляются спектральный состав для всех образцов-свидетелей. Результаты промежуточных вычислений и гармонических составляющих обобщенных преобразованных сигналов записываются в параллельном двоичном коде в блок 7 . оперативной памяти. Синхронизацию работы арифметического блока 8 обеспечивает блок 10 синхронизации. Блок 16 хранения констант, синхронизируемый блоком 15 управления и синхронизации, обеспечивает выдачу соответствующие констант (матрицу косинусов и синусов) через блок 6 обмена информации в арифметический блок 8. После заверщения последовательного упора образцов-свидетелей число последних задается блоком 11 управления. При адаптивном поиске оптимальной формы зондирующего воздействия на локальном временном интервале анализа соответствующей кратности оперируют параметрами интерполяционного полинома, аппроксимирующего характер изменения напряженности на соответствующих локальных интервалах анализа, а именно весомыми множителями при составляющих выщеуказанного интерполяционного полинома при реализации иттерацирнной процедуры поиска оптимальной формы зондарующего воздействия на объект. При этом щаг изменения (приращения) такого или другого весового множителя при составляюпшх данного интерполяционного полинома на каждом i-такте иттерационной выщеуказанной процедуры поиска оптимальной формы зондирования на о&ьект контроля устанавливается на базе априорной информации, полученной на (i-1) предыдущих тактах поиска,; и осуществляется блоком 14 управления процедурой функционального преобразования сигиала. Основное преимущество формирования оптимальной формы изменения тока намагничивания, реализуемое в устройстве, заключается в том, что адаптивный поиск осуществляется на совокупности реальных образцов свндетедей в цикле обучения, далее, поиск оптимальной формы последнего осущесталяется одновременно по всей совокутгаости локальных временных интервалов анализа соответствующей кратности. Для повьпиения информативной емкости исходного сообщения используют адаптивный поиск оптимальной формы зондирующего воз действия, когда в качестве обобщенных сигналов используются обобщенные преобразования сигналов другой кратности. Для этого блок 11 управления обеспечивает переключение режима работы блока 13 кратности на оперирование в дальнейщем дрртой кратно стью функционального преобразования сигнала. После завершения цикла обучения устройство переводится в режим Измерения. При этом функциональное преобразование исходной информации и вычисление спектральных составляющих в режиме Измерения аналогично изложенному в цикле ,Обучения. При вычислении гармонических спектральных составляющих на соответствующих локальных интервалах анализ осуществляется с использованием принципа разнесения во времени. Контроллер 1 тока намагничивания обеспечивает в режиме измерения такой характер зондирующего воздействия на объект контроля на соответствующих локаль ных шпервалах анализа соответствующих кратностей на объект контроля, который был выбран в цикле обучения. После вычисления соответствующих инфор.мативных спектральных составляющих блок 11 управления переключает работу устройства на вычисление оценки контролируемого параметра. При этом блок 18 задатчиков формирует но желанию оператора базис модели контроля. Блок 17 синхронизации обес печивает синхронный опрос многоканального коммутатора 19, причем соответствующий синхроимпульс на выходе последнего появляется только в том случае, если данная опрашиваемая составляющая (в соответствую щий момент времени) входит в модель контроля. Данные синхроимпульсы, кроме того, обес печивают вьщачу соответствующих весовых множителей при соответствующих информйтиввьтх составляющих и обеспечивают выдачу последних с блока 20 весовых множителей через блок б обмена информации в арифметический блок 8. При этом вьщача последних осуществляется отхронно с соответствзпощими информативными составлян щими (соответствующими гармониками), входящих в модель контроля соответствующего параметра изделия, которые поступают в арифметический блок 8 через блок 6 обмена информации из блока 7 оперативной памяти. Блок 17 синхронизации обеспечивает в совокупности с блоком 10 синхронизации формирование команд управления арифметическим блоком 8 в цикле вычисления оценок контролируемого параметра. После завершения данной процедуры вычисления оценки параметра результат вычислений поступает в регистратор 9 и по нему судят о контролируемом параметре. . Переключение режимов работы устройства может осуществляться как вручную в режиме Измерение, если цикл Обучения на соответствующей обучающей выборке образцов (данного типоразмера при заданной технологии изготовления) ранее произведен, или автоматически (если цикл обучения ранее отсутствовал), при этом оператор первоначально устанавливает работу устройства на режим Обучения, соответствующим образом воздействуя на блок 11 управления. . Применение данного устройства многопараметрового контроля физико-технических показателей ферромагнитных изделий по сравнению с известным (ЭМД8) имеет следующие преимущества: возможность осуществлять 100% неразрущающий электромагнитный многопараметровый контроль совокупности физико-технических показателей ферромагнитных изделий с заданной точностью и достоверностью по спектральным составляющим в базисе ортогональных тригонометрических функций с применением процедуры функционального преобразования исходного сигнала измерительного преобразователя на различной кратности локальных временных интервала анализа; применение адаптивной процедуры поиска оптимальной формы намагничивамЩёго тока в цикле Обучения из условия обеспечения оптимального подпространства сигналов; возможность оперативно менять базис модели контроля, т.е. обеспечение унифицированности измерения совокутшости измеряемых физико-технических показателей ферромагнитных изделий; применение процедуры функционального преобразования сигнала первичного преобразователя с представлением последнего в новой обобщенной системе отсчета в совокупности с процедурой вычитания исходного пьедестала на указанном локаль- , ном интервале анализа.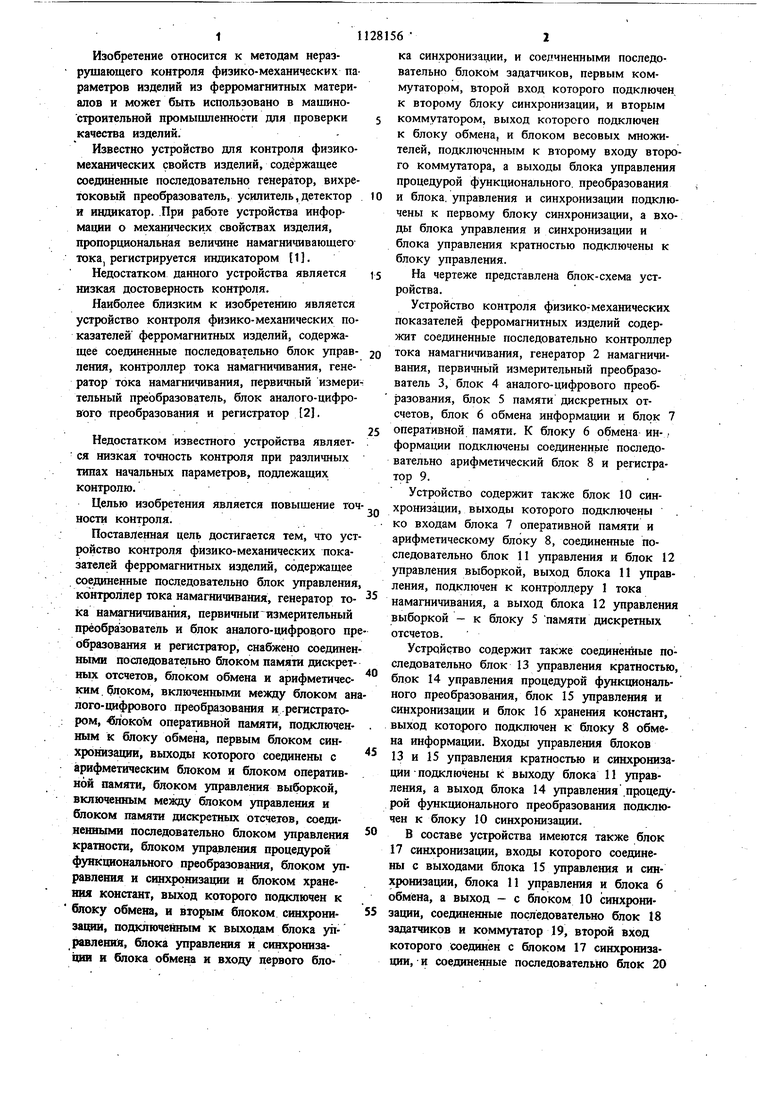

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля физико-механических свойств ферромагнитных изделий и устройство для его осуществления | 1987 |
|
SU1642363A1 |
| Способ контроля физико-механических показателей ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1325347A1 |
| Способ контроля физико-механических параметров ферромагнитных изделий и устройство для его осуществления | 1987 |
|
SU1532863A1 |
| Способ многопараметрового электромагнитного контроля ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1288579A1 |
| Устройство для контроля физико-механических свойств ферромагнитных изделий | 1987 |
|
SU1483347A1 |
| Устройство для спектрального анализа с постоянным относительным разрешением | 1982 |
|
SU1109760A1 |
| Устройство многопараметрового контроля физико-механических показателей ферромагнитных изделий | 1984 |
|
SU1379711A1 |
| ИНФОРМАЦИОННО-ТЕХНИЧЕСКАЯ СИСТЕМА ПОДГОТОВКИ ПОЛЁТНЫХ ЗАДАНИЙ НА ИСПЫТАТЕЛЬНЫЕ ПОЛЁТЫ | 2024 |
|
RU2835753C1 |
| Вычислительная система | 1977 |
|
SU692400A1 |
| ОТКАЗОУСТОЙЧИВЫЙ ПРОЦЕССОР С КОРРЕКЦИЕЙ ОШИБОК В ДВУХ БАЙТАХ ИНФОРМАЦИИ | 2021 |
|
RU2758410C1 |

УСТРОЙСТВО КОНТРОЛЯ ФИЗИКОМЕХАНИЧЕСКИХ ПОКАЗАТЕЛЕЙ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ, содержащее соединенные последовательно блок зшравления, контроллер тока намагничивания, генератор тока намагничивания, первичный измерительный преобразователь и блок .аналого-цифрового преобразования и регистратор, отличающееся тем, что, с целью повыщения точности кoнтpoля, оно снабжено соединенными последовательно блоком памяти дискретных отсчетов, блоком обмена и арифметическим блоком, включенным между блоком аналого-цифрового преобразования и регистратором, блоком оперативной памяти, подключенным к блоку обмена, первым блоком синхронизации, выходы которого соединены с арифметическим блоком и блоком оперативной памяти, блоком управления выборкой, включенным между блоком управления и блоком памяти дискретныхотсчетов, соединенными последовательно блоком управления кратности, блоком управления процедурой функционального преобразования, блоком управления и синхронизации и блоком хранения констант, выход которого подключен к блоку обмена, и вторым блоком синхронизации, подключенным к выходам блока управления, блока управления и синхронизации и блока обмена и входу первого блока синхронизации, и соединенными последовательно бло§ ком задатчиков, первым коммутатором, второй вход которого подключен к второму блоку синхронизации, и вторым коммутатором, выход которого подключен к блоку обмена, и блоком весовых умножителей, S подключенным к второму входу второго т коммутатора, а выходы блока зправления процедурой функционального преобразования и блока управления и синхродазации подключены к первому блоку синхронизации, а входы блока управления и синхронизации и блока управления кратностью пбдсд ключены к блоку управления. Од
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ МНОГОПАРАМЕТРОВОГО КОНТРОЛЯ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙВ П Т ь IШД S--?'iEi_ ^ T!^...^..»-«-^M«'v«rtW^ | 1972 |
|
SU429331A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ неразрушающего контроля твердости ферромагнитной ленты | 1976 |
|
SU590654A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
