двигателя, второй вход этого триггера соединен с выходом второго элрмен та ИЛИ, третий вход которого подключен к первому входу триггера запуска второго электродвигателя и к выходу первой дифференцирующей цепи, которая своим входом соединена с входами третьего и четвертого ключевых элементов, выходы которых соединены с одним вьгеодом первого, второго и третьего потенциометров, с одной клеммой источника опорного напряжения, с общей шиной и с выходами пятого и шестого ключевых элементов, входы которых электрически связаны с входом второй дифференцирующей
28902
цепи, выход которой соединен с третьим входом первого элемента ИЛИ, выход которого через второй вход триггера запуска второго электродвигателя подключен к шестому выходу блока управления, третий выход которого соединен с выходом триггера запуска первого электродвигателя, входы триггера реверса соответственно через седьмой и восьмой ключевые элементы подключены к общей шине, второй вьшод третьего потенциометра соединён с второй клеммой источника опорного напряжения и вторыми выходами первого и второго потенциометров.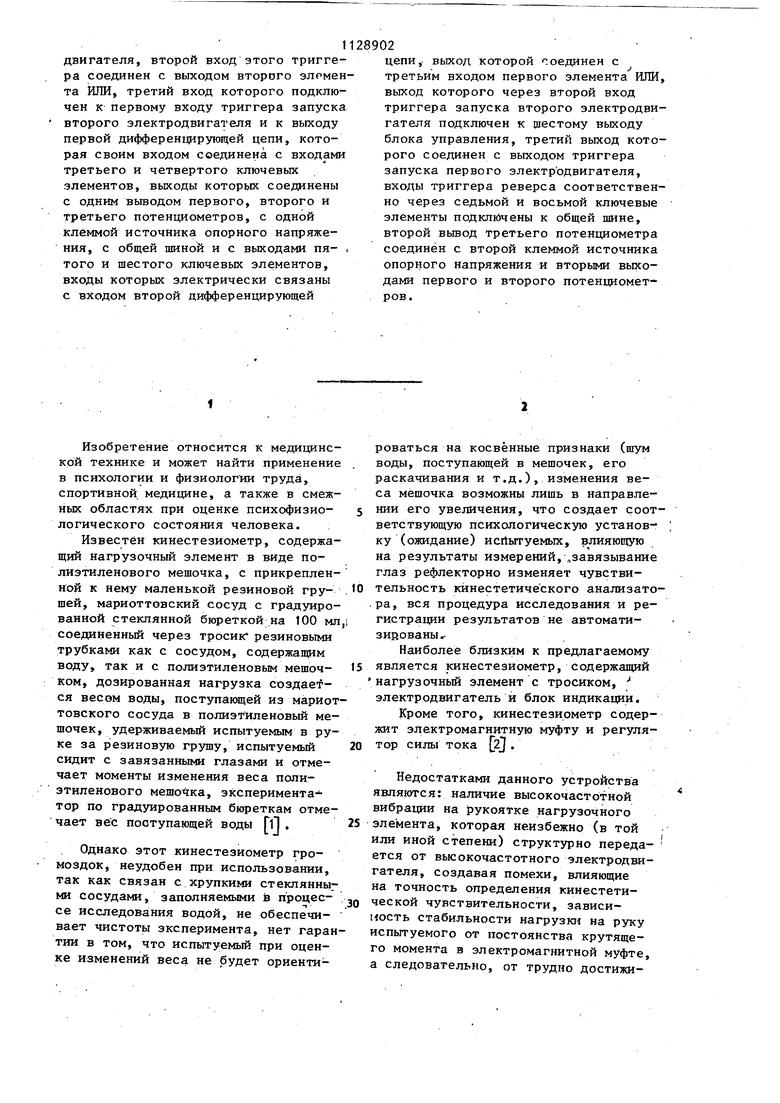
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемопередающее телеграфное устройство | 1989 |
|
SU1783633A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ | 1995 |
|
RU2094936C1 |
| Устройство для проверки максимальной токовой защиты в отключенном состоянии | 1974 |
|
SU792404A1 |
| Устройство для программного управления | 1982 |
|
SU1056133A1 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Устройство для дифференцирова-Ния чАСТОТы СлЕдОВАНия иМпульСОВ | 1978 |
|
SU798881A1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| Устройство для контроля магнитной ленты | 1986 |
|
SU1413670A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНЫХ ИНФОРМАЦИОННЫХ СИСТЕМ МАССОВОГО ОБСЛУЖИВАНИЯ ПРИ ЭКСПЛУАТАЦИИ | 2019 |
|
RU2708968C1 |
| Устройство для стабилизации переходного сопротивления контактов микропереключателя | 1983 |
|
SU1092588A1 |
1. КИНЕСТЕЗИОМЕТР, содержащий нагрузочный элемент с тросиком, электродвигатель и блок индикации, отличающийся тем, что, с . целью повьшения точности измерения, он снабжен вторым э.лектр1одвигателем, установленным на опорах рычажным механизмом, двумя .противовесами, шарнирной тягой, соединенной с рычажным механизмом и с штангой, закрепленной на опоре и соединенной с тро.сиком, и блоком управления, рычажный механизм выполнен в ввде двух рычагов с возможностью перемещения грузов по ним при помощи винта, противовесы расположены на концах рычагов, электродвигатель установлен между каткдым противовесом и соответствующей опорой рычага, первый, второй, третий и соответственно четвертый, Г1ять1Й и шестой выходы Рлока управления через первый и второй электродвигатели подключены к первому и второму входам блока управления, блок индика1щи соединен с переключателем, первый и второй выходы которого подключены к седьмому и восьмому входам блока управления. 2. Кинестезиометр по п.1, отличающийся тем, что блок управления выполнен в виде триггера реверса,триггеров запуска первого и второго электродвигателей, первого .и второго элементов ИЛИ, первого,второго и третьего потенциометров,первой и второй дифференцирующих цепей, сумматора, порогового элемента, первого, второго, третьего, четвертого, 3 пятого, шестого, седьмого и восьмого ключевых элементов,; первый выход . триггера реверса соединен с первым и четвертым выходами блока управления, второй и пятый выходы которого подключены к второму выходу триггера реверса, первый и второй входы блока управления соединены соответственно с скользящими контактами первого и второго потенциометров, каждый из которых подключен соответ- . ственно к первому и второму входам сумматора, выход которого соединен с восьмым входом блока управления и первым входом порогового элемента, второй вход которого подключен к седьмому входу блока управления и к скользящему контакту третьего потенциометру, а выход - с первьл4 входом первога к второго элементов ИЛИ, вторые входы которых через первый ключевой sheMeHT соединены с общей шиной, которая через второй ключевой элемент подключена к первому вхо ду триггера запуска первого электро
Изобретение относится к медицинской технике и может найти применение в психологии и физиологии труда, спортивной, медицине, а также в смежных областях при оценке психофизиологического состояния человека. :
Известен кинестезиометр, содержащий нагрузочный элемент в виде полиэтиленового мешочка, с прикрепленной к нему маленькой резиновой грушей, мариоттовский сосуд с градуированной стеклянной бюреткой на 100 мл соединенный через тросик резиновыми трубками как с сосудом, содержащим воду, так и с полиэтиленовым мешочком, дозированная нагрузка создается весом воды, поступающей из мариоттовского Сосуда в полиэтиленовый мешочек, удерживаемый испытуемым в руке за резиновую грушу, испытуемый сидит с завязанными глазами и отмечает моменты изменения веса полиэтиленового мешочка, экспериментатор по градуированным бюреткам отмечает вес поступающей воды ГЛ ,
Однако этот кинестезиометр громоздок, неудобен при использовании, так как связан с хрупкими стеклянныг ми сосудами, заполняемыми is процессе исследования водой, не обеспечивает чистоты эксперимента, нет гарантии в том, что испытуемый при оценке изменений веса не будет ориентироваться на косвенные признаки (шум воды, поступающей в мешочек, его раскачивания и т.д.), изменения веса мешочка возможны лишь в направлении его увеличения, что создает соответствующую психологическую установку (ожидание) исйытуемых, влияющую на результаты измерений,,завязывание глаз рефлекторно изменяет чувствительность кинестетического анализато.ра, вся процедура исследования и регистрации результатов не автомати- зир.ованы..
Наиболее близким к предлагаемому является кинестезиометр, содержащий
нагрузочный элемент с тросиком, электродвигатель и блок индикации.
Кроме того, кинестезиометр содержит электромагнитную муфту и регулятор силы тока И .
Недостатками данного устройства являются: наличие высокочастотной вибрации на рукоятке нагрузочного элемента, которая неизбежно (в той или иной степени) структурно передается от высокочастотного электродвигателя, создавая помехи, влияющие на точность определения кинестетической чувствительности, зависимость стабильности нагрузки на руку испытуемого от постоянства крутящего момента в электромагнитной муфте, а следовательно, от трудно достижи31
мой стабильности электрического напряжения на муфте, а также от степени однородности материала муфты и стабильности его остаточных магнитных свойств, кроме того, в устройстве усилие, развиваемое электромагнитной муфтой, нелинейно зависит от силы тока в обмотках, изготовление муфты требует использования ненамагничивающихся сплавов, что предъявляет высокие требования к технологии изготовления. Все это снижает точность измерений кинестетической чувствительности.
Цель изобретения - повьшение точности измерения.
Поставленная цель достигается тем, что кинестезиометр, содержащий нагрузочный элемент с тросиком, электродвигатель и блок индикации, дополнительно снабжен вторым электродвигателем, установленным на опорах рычажным механизмом, двумя противовесами, шарнирной тягой, соединенной с рычажным механизмом и с штангой, закрепленной.на опоре и соединенной с тросиком,и блоком управления, рычажный механизм выполнен в виде двух рычагов с возможностью перемещения грузов по ним при помощи винта, противовесы расположены на концах рычагов, электродвигатель установлен между каждым противовесом и соответствующей опорой рычага, первый, второй, третий и соответственно четвертьй, пятый и шестой выходы блока управления через первый и второй электродвигатели подключены к первому и второму входам блока управления, блок индикации соединен с переключателем, первый и второй выходы которого подключены к седьмому и восьм.ому входам блока управления.
Кроме того, в кинестезиометре блок управления вьптолнен в виде триггера реверса,, триггеров запуска первого и второго электродвигателей, первого и второго элементов ИЛИ, первого, второго и третьего потенцио метров, первой и второй дифференцирующих цепей, сумматора, порогового элемента, первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключевых элементов, первый выход триггера реверса соединен с первым и четвертым выходами блока управления, второй и пятый
89024
выходы которого подключены к второму выходу триггера реверса, первый и второй входы блока управления соединены соответственно с скользящими 5 контактами первого и второго потенциометров, каждый из которых подклю. чен соответственно к первому и второму входам сумматора, выход которого соединен с восьмым входом блоtO ка управления и первым входом порогового элемента, второй вход котор.ого подключен к седьмому входу блока управления и к скользящему контакту третьего потенциометра, а выход - к
15 первым входам первого и второго элементов ИЛИ, вторые входы которых через перВьй ключевой элемент соединеныс общей шиной, которая через второй ключевой элемент подключена
0 к первому входу триггера запуска первого электродвигателя, второй вход этого триггера соединен с выходом второго элемента ИЛИ, третий вход которого подключен к первому входу
5 триггера запуска второго электродвигателя и к выходу первой дифференцирующей цепи, которая своим входом соединена с входами третьего и четвертого ключевых элементов, выходы
Q которых соединены с одним выводом первого, второго и третьего потенциометров, с одной клеммой источника опорного напряжения, с общей шиной и с выходами пятого и шестого ключевьк элементов, входы которых электрически связаны с входом второй дифференцирующей цепи, выход которой соединен с третьим входом первого элемента ИЛИ, выход которого че... рез второй вход триггера запуска вто0
рого электродвигателя подключен к
шестому выходу блока управления, третий выход которого соединен с выходом триггера запуска первого электродвигателя, входы триггера реверса соответственно через седьмой и восьмой ключевой элементы подключены к общей шине, второй вывод третьего потенциометра соединен с второй клеммой источника опорного напряжения и вторыми выходами первого и второго потенциометров.
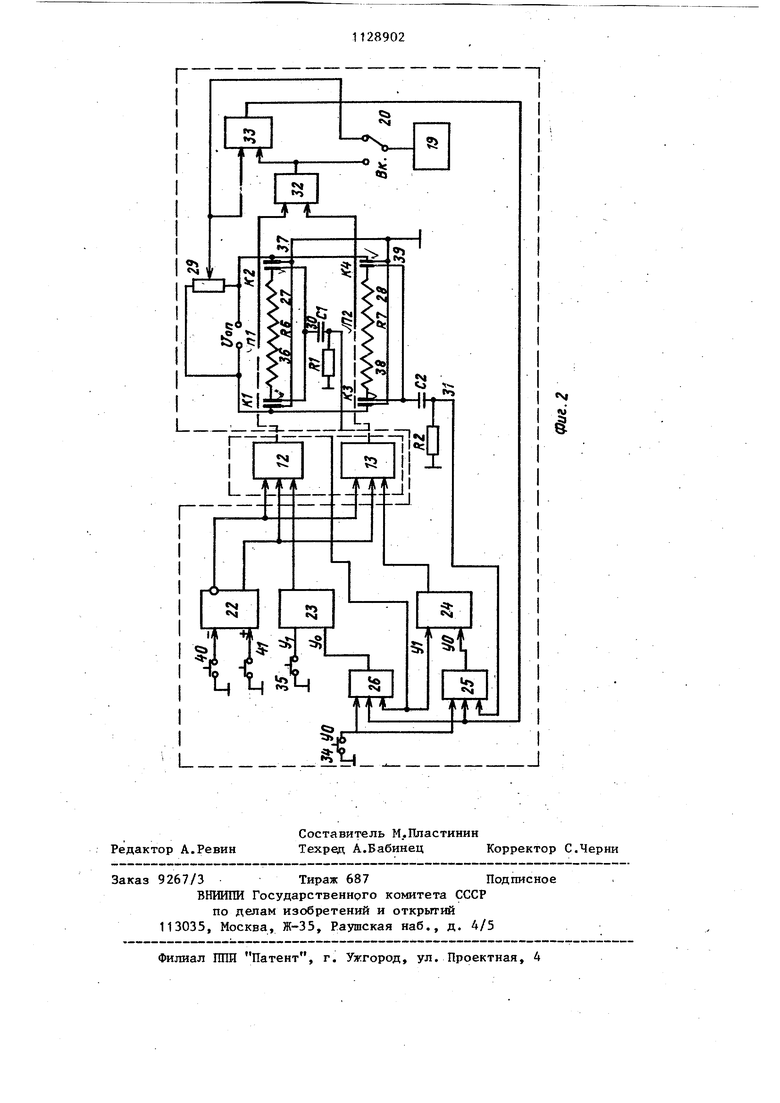
На фиг. 1 изображена структурная схема кинестезиометра, на фиг. 2 схема блока управления.
Кинестезиометр содержит нагрузочный элемент 1, тросик 2, штангу 3, первую опору А, рычажный механизм 5, состоящий из первого 6 и второго 7 рычагов, которые установлены соответ ственно на второй 8 и третьей 9 опорах, первый 10 и второй 11 противовесы, первый 12 и второй 13 электродвигатели., первый 14 и второй 15 винты, первый 16 и-второй 17 грузы, шарнирную тягу 18, блок 19 индикации с переключателем 20 и блок управления 21. . Блок управления 21 содержит триггер 22 реверса, триггер 23 запуска первого электродвигателя, триггер 24 запуска второго электродвигателя, первый элемент ИЛИ 25, второй элемент ИЛИ 26, первый 27, второй 28 и третий 29 потенциометры, первую 30 и вторую 31 дифференцирующие цепи, сумматор 32, пороговьй -элемент 33, первый 34, второй 35, третий 36 четвертый 37, пятый 38, шестой 39, .седьмой 40 и восьмой 41 ключевые элементы. Кинестезиометр работает следующи образом. Пусть первьй груз 16 перемещается вращающим винтом 14 по грузовому плечу рычага 6 рычажного механизма Усилие от груза 16, возникающее на грузовом .плече рычага 6 рычажного механизма 5 относительно опоры 8, передается через шарнирную тягу 18 на свободный конец штанги 3. Другой конец штанги 3 шарнирно закреплен в опоре 4. Далее усилие передается через тросик 2 на нагрузочный элемент 1 и руку испытуемого. Вращение первого 14 и второго 15 винтов осуществляется первым 12 и вторым 13 электродвигателями постоянного тока с понижающими редукторами. Уравновешивание первого 6 и второго 7 рыч гов рычажного механизма 5 осуществляется первым 10 и вторым 11 противовесами в момент, когда первый 16 и второй 17 грузы находятся в нулевом положении (крайнее правое на фиг. 1). Информация о нагрузке на нагрузочном элементе 1 поступает к исследователю из блока управления 21 путем регистрации положения перв го 16 и второй 17 грузов со скользящими контактами относительного первого 27 и второго 28 потенциомет ров, вк.пюченных в цепь опорного на пряжения,. Начало работы кинестезиометра определяется нажатием на первый ключевой элемент 34 (кнопку УС), который установит триггеры 23 и 24 запуска первого 12 и второго 13. электродвигателей в состояние О. Электродвигатели остановлены. Переключатель 20 устанавливают в положение 1 (фиг.2) и блок 19 индикации оказывается подключенным к третьему потенциометру 29, задающему величину усилия, относительно которого измеряется чувствительность человека к изменению нагрузки. Увеличение или уменьшение нагрузки определяется триггером 22 реверса в зависимости от предварительного нажатия на седьмой 40 и восьмой 41 ключевые элементы. После включения второго ключевого элемента 35 (нажатием кнопки Пуск), триггер 23 запуска первого электродвигателя 12 устанавливается в состояние 1, включая первьй электропвигатель 12. который начинает вращаться в сторону, определяемую состоянием триггера 22 реверса. При этом меняется положение скользящего контакта первого потенциометра 27 и, следовательно, в результате изменения сигналов на сумматоре 32 и на третьем потенциометре 29 пороговый элемент 33 вырабатывает импульс, устанавливающий триггеры 23 и 24 запуска первого и второго электродвигателей в состояние О. Первый электродвигатель 12 останавливается и вес фиксируется в соответствии с заданным на третьем потенциометре 29 значением. Если первый груз 16 обеспечивает усилие меньше заданного, то после достижения скользящим контактом первого потенциометра 27 максимального перемещения четвертьй ключевой элемент 37 з/амыкается и через первую дифференцирующую цепь 30 и второй элемент ИЛИ 26 триггер 23 запуска первого электродвигателя устанавливается в состояние О, что остановит первьй электродвигатель 12. Триггер 24 запуска электродвигателя установится в состояние 1, запуская второй электродвигатель 13, и на сумматор 32 поступает добавочное напряжение со скользящего контакта второго потенциометра 28. Скользящий контакт второго потенциометра 28 будет перемещаться пока не сработает пороговьй i элемент 33, после чего через вторую дифференцирующую цепь 31 и пс.рвьй элемент 7 ИЛИ 23 триггер 24. запуска.второго электродвигателя установится в состояние О. После повторного включения второ го ключевого элемента 35 (нажатием кнопки Пуск), в зависимости от сост ния триггера 22 реверса, будет проводиться уменьшение или увеличение нагрузки до момента реакции испытуе мого на включение первого ключевого элемента 34 (кнопку УО). При этом электродвигатели 12 и 13 остановятся, фиксируя вес, при котором было почувствовано изменение. При переводе переключ.ателя 20 в положение
Г
J Jf J LA-n Л-AJ -Л.AJ LЛ-AA-/ - ij CA-ru
w л V ЛГ V --;«4 Ж
1
MeVtIjAVA
12
/7 5 15
Ш
ДДДДАДД||
т-тг 1Г WW Ш
fd П
20
W
uzj 28 2 блок 19 индикации позволяет измерить эту величину. Возврат нагрузки в исходное состояние осуществляется при срабатывании седьмого 40 и второй 35 ключевых элементов (нажатием .кнопок Ум и Пуск) . Когда замкнутся контакты четвертого 37 и шестого 39 ключевых элементов электродвигатели 12 и 13 остановятся. Предлагаемое устройство является конструктивно простым, не требует при изготовлении сложной технологии или дефицитных материалов, обеспечивает высокую точность измерений и автоматизацию исследования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Завьялов А.В | |||
| Высшая нервная деятельность, т | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для исследования дифференциальной чувствительности кинестетического анализатора | 1977 |
|
SU707571A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| ; | |||
