f
Изобретение относится к области электропривода и может применяться при автоматизации технологических процессов. .
Целью изобретения является повышение быстродействия системы автоматического управления (САУ).
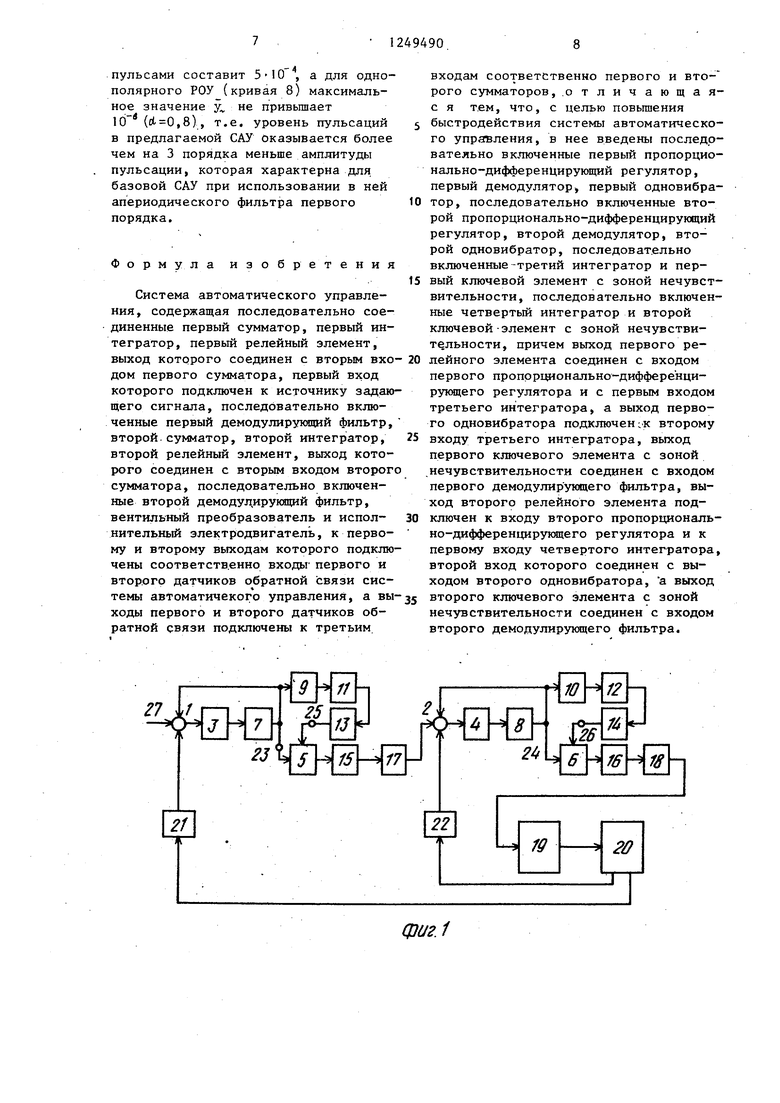
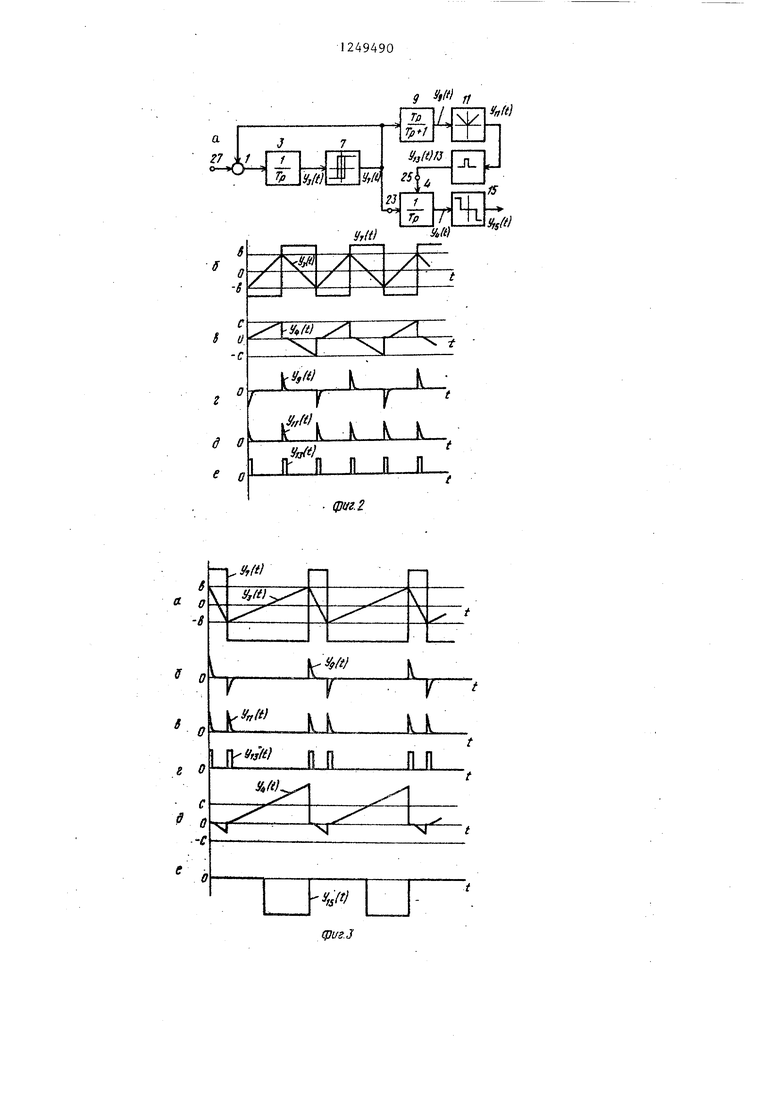
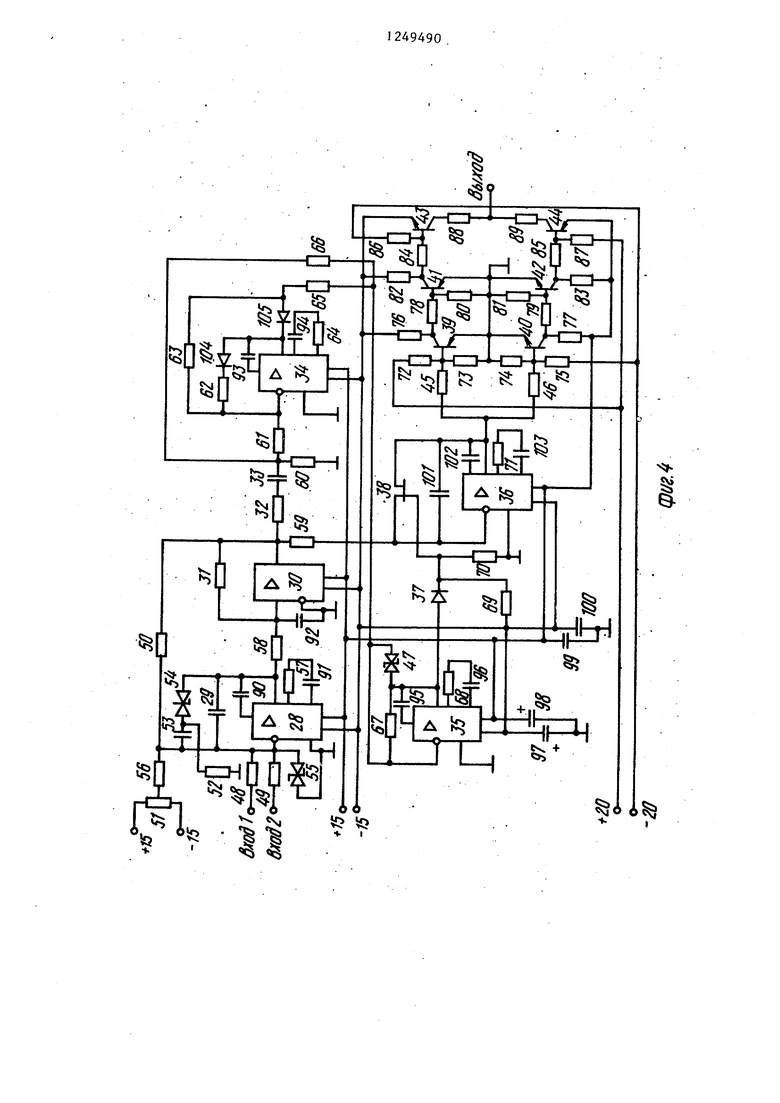
На фиг. 1 изображена функциональная схема САУ; на фиг. 2 и 3 - временные диаграммы ее сигналов; на фиг, 4 - схема, поясняющая техническую реализацию устройства; на фиг. 5 экспериментальные характеристики.
В состав САУ (фиг. 1) входят первый 1 и второй 2 сумматоры, первый 3 второй 4, третий 5 и четвертый 6 интеграторы первый 7 и второй 8 релейные элементы, первый 9 и второй 1 пропорционально-дифференцирующие регуляторы, первый 11 и второй 12 демодуляторы, первый 13 и второй 14 одновибраторы, первый 15 и второй 16 ключевые элементы с зоной нечувствительности, первый 17 и второй 18 демодулирующие фильтры, вентильный преобразователь 19, исполнительный .электродвигатель 20, датчики 21 и 22 обратных связей САУ, первые 23, 24 и вторые 25, 26 входы интеграторов 5 и 6, клемма 27 для подключения источника задающего сигнала, первый операционный усилитель 28 (фиг. 4), первый конденсатор 29, второй операционный усилитель 30, первый резистор 31, второй резистор 32, второй конденсато.р 33, третий, четвертый и пятый операционные усилители 34-36 диод 37, ключевой элемент 38, транзисторы 39-44, третий и четвертый резисторы 45 и 46, стабилитрон 47, пятый, тестой и седьмой резисторы 48-50, потенциометр 51, восьмой резистор 52, третий конденсатор 53, второй стабилитрон 54, третий стабилитрон. 55, а также резисторы 56-89, конденсаторы 90-103, диоды 104 и 105
Функциональное назначение и характеристики основных блоков САУ следующие,
Сумматоры I и 2 имеют единичный коэффициент передачи во всем диапазоне статической характеристики
вход-выход ;
Интеграторы 3-6 с передаточной функцией v(p) l/T(, где Т - постоянная времени. Кроме того, интеграторы 5 и 6 имеют входы 25 и 26 для установки нулевых начальных условий,
0
5
5
0
5
0
5
ную функцию вида w(p)что происходит под действием сигнала с выхода блоков 13 и 14.
Релейные э.пементы 7 и 8 имеют симметричные относительно нуля пороги переключения и неинвертирующую пет.шо гистерезиса.
Регуляторы 9 и 10 имеют передаточную функцию v(p)Tp/(-Tp + l).
Блоки 11 и 12 служат для выпрямления выходных напряжений регуляторов 9 и 10.
Одновибраторы 13 и 14 формируют импульсы заданной длительности и амплитуды синхронно с возникновением на выходе блоков 11 и 12.
Ключи 15 и 16 реализованы с зоной . нечувствительности ±С.
Фильтры 17 и 18 имеют передаточ11+Тр
Датчики 21 и .22- в диапазоне рабочих частот САУ являю.тся безинерцион- ными и преобраззпот регулируемые координаты двигателя 20 в электрический сигнал заданной мощности.
Преобразователь 19 служит для питания двигателя 20 в функции напряжения на выходе фильтра 18.
В состав САУ входят два идентичных регулятора на основе РОУ с час- тотно-щиротно-импульсной модуляцией.
Первый регулятор (внешний контур регулирования САУ) вк.гаочает звенья 1, 3, 5, 7, 15, 17, 9, 11, 13, а второй (внутренний контур регулирования) - 2, 4, 8, 6, 16, 18, 10, 12,. 14.
Каждый из регуляторов САУ предназначен для регулирования соответствующими параметрами электродвигателя 20, информация о которых поступает с выхода датчиков 21 и 22 обратных свя- . зей САУ.
Принцип действия регулятора САУ идентичен, поэтому ограничимся рас- - смотрением каскада, включающего звенья 1, 3, 7, 5, 15, 17, 9, 11, 13 (фиг. 1 и 2 а)о
Основной тракт РОУ. включает в себя автоколебательную систему на ба- 0 зе звеньев 1, 3, 7, с помощью кото
рых аналоговые сигналы, поступающие на вход сумматора 1, преобразуются в импульсный .биполярный сигнал с частотно-широтно-импульсной модуля - цией.
Релейный элемент 7 имеет симметричные относительно нулевого уровня САУ пороги переключения ±В, а его
3
выходной сигнал может меняться дискретно -в пределах, определяемых нап- ряжением исночника питания РОУ„
Устройство работает следующим образом.
При отсутствии сигнала на входе, например, 27 РОУ (фиг. 2 а)-на выходе релейного элемента 7 формируется сигнал--у (t) типа меандр -со средним нулевым значением (фиг. 2 б),, Выходной сигнал У, (t) интегратора 3 (фиг. 2 б) имеет форму симметричной пилы с амплитудой, ограниченной значением порогов переключения В релейного элемента 7.
Наличие сигнала управления на входе 27 РОУ влечет за собой изменение производной развертки У, (t) (фиг. За). В один из полупериодов автоколебаний темп нарастания выходного сигнала интегратора 3 определяется разлостью сигналов на входах сумматора 1 (фиг. 2 а), а в другой пелупериод - зависит от сум- мы этих сигналов. В результате за период автоколебаний РОУ постоянная составляющая импульсов на выходе звена 7 достигает уровня, пропорционального величине входного сигнала РОУ (фиг. За). . .
Звенья 5, 9, 11, 13 и Г5 (фиг. 2 а) предназначены для преобразования биполярного выходного сигнала звена 7 в однополярный, что в конечном итоге, по.зволяет повысить быстродействие сигнала САУ
Ключевой элемент 15 имеет симметричную относительно нуля РОУ зону нечувствительности С (фиг. 2 в, фиг. 3 д).
Под действием выходного сигнада звена 7. выходной сигнал интеграт i тора 5 нарастает в положительном направлении (фиг, 2 в), В моменты времени изменения знака сипгала У (t) (фиг. 2 б) на выходе пропорционально-дифференцирующего регулятора 9 формируются дифференцирующие импульсы ye(t) (фиг. 2 а, фиг. 3 б), которые затем демодулируются (вьш- рямляются) с помощью демодулятора 1 (фиг. 2 д, фиГо 3 в). Получаемый таким образом сигнал y.,( t) служит для запуска одновибратора 13, выходной сигнал Уз( Ь) которого представляет собой импульсы малой и стабильной длительности с фиксированной амплитудой (фиго 2 а, фиг. 3 г),,
.
249490.4
С помощью импульсов y,j(t), подаваемых на второй вхОд 25 интегратора 5, синхронно с моментом времени изменения знака сигнала у (t) 5 (фиг. 2 а, фиг. 3 а) производится установка нулевых начальных условий сигнала y5(t) (фиг, 2 в, фиг. 3 д). Зона нечувствительности 1 С зйена 15 . или постоянная времени интегратора 5 О (фиг. 2 а) выбираются таким образом, чтобы при нулевом значении сигнала управления на входе РОУ сигнал на выходе ключевого элемента 15 был бы равен нулюо
5 При изменении скв ажности импульсов y(t) (фиг. 3 а) на выходе звена 15 формируются однополярные импульсы j|jj.(t) (фиг/3 е), так как установка нулевых начальных условий 20 интегратора 5 осуществляется в моменты времени, когда у,( Ь) (фиг. 3 д). Постоянная составляющая сигнала ) (фиг. 3 е), так же как и И1ч пульсоя y(t) (фиго За), пропорциональна ве25 личине управляющего воздействия на входе РОУ. Разница между импульсами У (t) и у (t) заключается в том, что сигнал y.ytt) содержит более низкий уровень высших гармоник, чем биполяр30 ные импульсы у (t) Поэтому при
фильтрации сигнала y,g( t} постоянная времени фильтра 17 (фиг. 1) может быть существенно уменьшена по сравнению с тем значением, которое обеспе2 чило бы подавление высокочастотного спектра импульсов y(t). Принцип работы регулятора на основе РОУ с элементами 2, 4, 8, 6, 16, 10, 12, 14 аналогичен, .
40 Следовательно, введение звеньев 5, 9, 11, 13, 15 и 6i 10, 12, 14, 16 (фиГо 1) приводит к уменьшению постоянных времени фильтров 17, 18 и обеспечивает повышение быстродействия САУ,
45 Другой особенностью предлагаемой САУ является то, что принцип преобразования биполярного выходного сигнала релейного элемента 7(8) (фиг. 1) в однополярный сигнал, несмотря на
5Q наличие инерционных звеньев 5 и 6, не изменяет динамических параметров каскадов , 3, 7 и 2, 4,8, определяемых частотой их автоколебаний. Это является следствием того, что
55 интеграторы 5 и 6 выполнены с перно- дической в функции знака выходных импульсов автоколебательного трактаРОУ установкой нулевых начальных условий.
Пример технической реализации РОУ на основе которого выполняются регуляторы предлагаемой САУ, представлен на фиг. 4.
Звенья 1, 3, 7, (фиг. 2 а) реализуются на операционных усилителях (ОУ) 28 и 30 (фиг.-4). Релейный элемент 7 (фиг, 1) представляет собой регенеративный компаратор с резисто- ром 31 (фиг,. 4) в цепи положительной обратной связи ОУ 30. Интегратор 3 (фиг. 2 а) выполнен на ОУ 28 с конденсатором 29 в цепи отрицательной обратной связи (фиг. 4). Конденса- тор 53, стабилитрон 54 и резистор 52 предназначены для дискретного увеличения постоянной времени РОУ в случае, когда амплитуда помехи на входе РОУ превышает линейный (допусти- мый) диапазон изменения входного сигнала развертывающего усилителя. Вход 1 и Вход 2 служат для подключения источников сигнала управления. Передаточная функция РОУ опре- деляется характером сопротивлений 48-50. Потенциометр 51 предназначен для установки нуля выходного сигнала РОУ.
Дифференцирующее звено 9 (фиг. 2а) реализуется на пассивной RC-цепи . 32,33 (фиго 4).
Демодулятор 11 и формирователь 13 (фиг. 2 а) выполенны на ОУ 34 и .35, стабилитроне 47 и диоде 37.
Интегратор 5 (фиг. 2 а) представляет собой ОУ 36 (фиг. 4) с конденсатором и ключевым элементом 38 в цепи отрицательной обратной связи.
Ключевой элемент 15 (фиг, 2 а) реализован на транзисторных каскадах 39-44 и резисторах смещения 45 и 46 (фиг. 4), с помощью которых определяется уровень зоны нечувствительности t С выходного каскада РОУ,
В качестве базового элемента РОУ используются интегральные ОУ типа К153УД1,
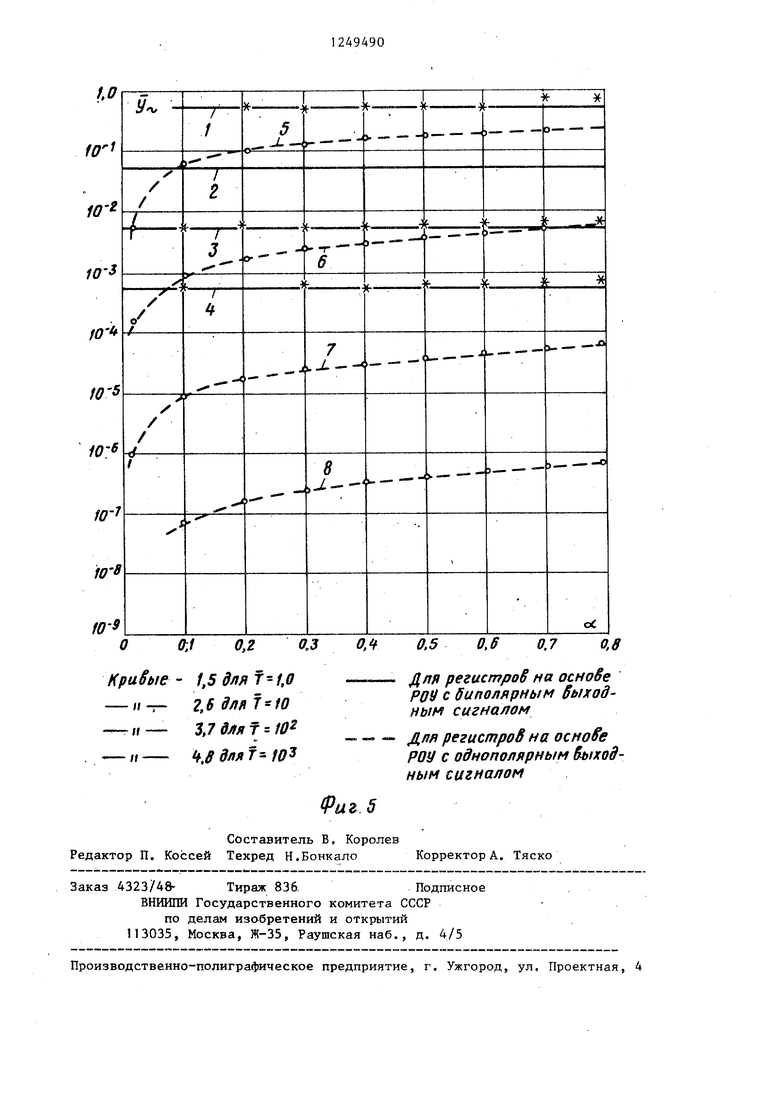
На фиг. 5 показаны экспериментальные характеристики (cL) для РОУ с биполярным выходным сигналом (фиг, 2 а, звенья 1, 3, 7) и для РОУ предлагаемой САУ с однополярным характером выходных импульсов (фиг. 2 а, звенья 1, 3, 7, 5, 9, 11, 13, 15),
-. ;У / Здесь относительное
значение двойной
1
амплитуды у, пульсаций сигнала на выходе демоду- лирующего фильтра РОУ первого порядка с передаточной функцией;
VP)T;
i А - амплитуда импульсов на выходе РОУ (амплитуда импульсов на выходе звеньев 7 и 15 равны по модулю, фиг, 2 а);
- нормированное значение постоянной времени Т демоду- лирующего фильтра РОУ;
Тд - период автоколебаний кас када 1 , 3, 7 при нулевом значении сигнала на входе РОУ (клемix(t) Л - -д 1 нормированное значение амплитуды входного сигнала РОУ при условии, что за период автоколебаний его значение остается неизменным.
Сравнительный анализ представленных результатов позволяет сделать следующие выводы.
При.использовании в САУ биполярного РОУ для получения амплитуды пульсаций на выходе демодулирукнцего фильтра 17 первого порядка на уров- fre необходимо обеспечить значение (фиг. 5, прямая 2),
Предлагаемый принцип построения ; САУ при том же значении (фиг. 5, кривая 6) обеспечивает максимальный уровеньД, 10 ((,8).
Таким образом, для получения одного и того же значения у постоянная времени фильтров 17 и 18 (фиг, 1) в предлагаемой САУ может быть значительно уменьшена, что влечет за собой повьшение быстродействия системы управления в целом.
Например, при (фиг, 5, прямая 4) у для РОУ с бицолярными импульсами составит 5-10 , а для одно- полярного РОУ (кривая 8) максимальное значение у не привышает 10 (,8), т.е. уровень пульсаций в предлагаемой САУ Оказывается более чем на 3 порядка меньше амплитуды пульсации, которая характерна для базовой САУ при использовании в ней апериодического фильтра первого порядка.
Формула изобретения
Система автоматического управления, содержащая последовательно соединенные первый сумматор, первый интегратор, первый релейный элемент, выход которого соединен с вторым вхо- дом первого сумматора, первый вход которого подключен к источнику задающего сигнала, последовательно включенные первый демодулирующий фильтр, второй сумматор, второй интегратор, второй релейный элемент, выход которого соединен с вторым входом второго сумматора, последовательно включенные второй демодудирукяций фильтр, вентильный преобразователь и испол- нительный электродвигатель, к перво- му и второму выходам которого подключены соответств.енно входы первого и второго датчиков обратной связи системы автоматичекого управления, а выходы первого и второго датчиков обратной связи подключены к третьим
5
5
0 5 0 5
входам соответственно первого и второго сумматоров,.отличающая- с я тем, что, с целью повышения быстродействия системы автоматического управления, в нее введены последовательно включенные первый пропорционально-дифференцирующий регулятор, первый демодулятор, первый одновибра- тор, последовательно включенные второй пропорционально-дифференцирующий регулятор, второй демодулятор, второй одновибратор, последовательно включенные-третий интегратор и первый ключевой элемент с зоной нечувствительности, последовательно включенные четвертый интегратор и второй ключевой-элемент с зоной нечувстви- т льности, причем выход первого релейного элемента соединен с входом первого пропорционально-дифференци- рукяцего регулятора и с первым входом третьего интегратора, а выход первого одновибратора подключен;к второму входу третьего интегратора, выход первого ключевого элемента с зоной .нечувствительности соединен с входом первого демодулир ующего фильтра, выход второго релейного элемента подключен к входу второго пропорциональ- но-дифференцирукяцего регулятора и к первому входу четвертого интегратора, второй вход которого соединен с выходом второго одновиб1 атора, а выход второго ключевого элемента с зоной нечувствительности соединен с входом второго демодулирукяцего фильтра.
фиг.1
ГТ
Z7 1/ ГТ
О г
W
д п
/
УяН
У,зМ13
iP
У,К}
JL.
15
y,sM
Оft/ 0,2OJ
KpuSbie - 1,5 дая f 1,0
- 2,6 дли f-fO г.Тдляг Ю
.вдаяТ Ю
fPuB 5
Составитель В, Королев Редактор П. Коссей Техред Н.Бонкало Корректор А. Тяско
Заказ 4323/48- Тираж 836.Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0.5
0.6
0.7
0.8
Дпи регистров на основе РОУ с биполярным бы ход- ным сигналом
afl регистров на основе РОУ с однополярным выходным сигналом
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1983 |
|
SU1167578A1 |
| Система управления | 1984 |
|
SU1211688A1 |
| АНАЛОГО-ЦИФРОВОЙ ДАТЧИК НУЛЕВОГО ТОКА | 2011 |
|
RU2460134C1 |
| ОДНОТАКТНЫЙ МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2549128C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Развертывающий усилитель | 1988 |
|
SU1508245A2 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| Развертывающий операционный усилитель | 1984 |
|
SU1218400A1 |
Изобретение может использоваться в системах автоматизации технологических процессов. Система автоматического управления (САУ) выполнена по принципу подчиненного регулирования параметров на основе автокс- . лебательных развертывающих операционных усилителей (РОУ) с частотно- широтно-импульсной модуляцией. Устройство позволяет повысить быстродействие САУ за счет введения в РОУ блоков преобразования биполярного частотно-импульсного сигнала в одно- полярный с тем же законом модуляций, i 5 ил. 1чЭ 4 ;о 4 СО
| Система управления | 1979 |
|
SU842722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
