Изобретение относится к медицинской технике и предназначено для исследований активных движений животных в процессе мьшечной нагрузки Известно устройство для исследования активных движений животных, содержащее беговую дорожку в виде барабана, корпус которого содержит центральную ось, соединенную с одной стороны корпуса через муфту датчика реакции и редуктор с электр двигателем, а с другой стороны корпуса - со спидометром,и регистрирую щий прибор Cl3. Однако устройство не обеспечивае необходимой точности количественной оценки активных движений животного. Цель изобретения - повышение точности количественной оценки активных движений животного. Поставленная цель достигается те что В устройстве для исследования активных движений животных, содержа щем беговую дорожку в виде барабана корпус которого содержит центральную ось, соединенную с одной сторон корпуса через муфту датчика реакции и редуктор с электродвигателем, а с другой стороны корпуса - со спидометром и регистрирующим прибором, на центральной оси установлен измеритель угла отклонения положения барабана от положения оси муфты датчика реакции, содержащий потенци метр, корпус которого жестко соединен с осью барабана, а поводок подвижного электрода жестко соедине с муфтойдатчика реакции, и трехкол цевой коллектор, кольца которого соединены с электродами потенциометра а щетки - с регистрирующим прибором На чертеже изображено устройств для исследования активных движений животных. Устройство содержит основание 1, электродвигатель 2- с трансмиссией 3 и.редуктором 4. Беговая дорожка устройства выполнена в виде барабана 5, имеющего корпус 6 с дверцей 7 для размещений животного, сетчату беговую дорожку 8 и две сплошные стенки 9 барабана 5. Барабан 5 укреплен на центральной оси 10 и содержит три кронштейн 11, укрепленных через 120 по периметру барабана 5. С помощью трех цилиндрических пружин 12 барабан 5 соединен с корпусом муфты 13 датчика реакции. 192 Корпус муфты 13 через спиральную ленточную пружину 14 соединен с выходной осью 15 редуктора 4. С осью 10 жестко соединена ось спидометра 16, выходные сигналы которого регистрируются с-, помощью регистрирующего прибора (не показан) . Ось 10 через подшипниковые втулки 17 укреплена на стойке основания 1, На оси 10 закреплены три кольца 18 трехкольцевого коллектора, щетки 19 которого соединены с ре- гистрирующим прибором (не показан. Между барабаном 5 и муфтой 13 на оси 10 установлен корпус потенциометра 20, а поводок 21 подвижного электрода закреплен на оси 22 муфты 13. Электроды потенциометра проводниками 23, проходящими через полую ось 10, соединяются с кольцами 18 коллектора. В качестве регистратора может быть использован стандартный регистратор типа Э1Ш-09. Устройство работает следующим образом. После прогрева электроизмерительной аппаратуры калибруются сигналы, получаемые со спидометра 16 и потенциометра 20. Для этого барабан 5 беговой дорожки поворачивают на 180 по часовой стрелке, калибруют сигнал для потенциометра 20. Отпускают барабан 5. Под действием пружин 12 барабан 5 возвращается в начальную позицию. Сигнал, полученный со спидометра 16, калибруется отдельно. Так как спидометр 16 представляет собой электромотор постоянного тока, работающий как генератор электрического тока, то, полученный с него сигнал записывается на отдельном регистраторе . При синхронном вращении барабана 5 с выходной осью 15 запись ведется по центру диаграммы потенциометра, при увеличении скорости вращения барабана 5 - выше центральной изолинии, а при уменьшении (отставание в скорости барабана 5 от скорости вращения выходной оси 15 ) скорости вращения - ниже центральной изолинии. То же производят при повороте барабана против часовой стрелки. Включают электродвигатель ,2 и perj лируют изолинию на записьгеающем устройстве электронного потенциомет ра так, чтобы она вычерчивалась по
3 ч
центру. Для этого поводок 21 потенциометра 20 фиксируют в выходной оси 15 с таким расчетом, чтобы при равномерном вращении барабана 5 создавались разноплечные сопротивления в потенциометре 20.
После калибровки сигналов устройства в барабан 5 через дверцу 7 сажают исследуемое животное. При отключенном электродвигателе 2 барабан 5 находится в нулевом и неподвижном состоянии (пружины 14 и 12 полностью ослаблены). Находящееся в барабане 5 животное совершает движение по беговой дорожке 8. Вращательный момент передается на ось 10, спидометр 16, корпус потенциометра 20, спиральные и ленточные пружины 12 и 14. В зависимости от скорости и направления вращения спидометра 16 вырабатывается соответствующее напряжение, а в зависимости от угла поворота корпуса потенциометра 20 по отношению к поводку 21 регистрируется изменение электросопротивления потенциометра.
Животное может находиться в барабане 5 в движении и без движения, соответственно вращая барабан 5 или удерживс1я его в трех позициях: нулевая позиция - при полностью расслабленных пружинах; в позиции опережения - по ходу движения барабана 5; в позиции отставания - против хода барабана.
Регистрация особенностей состояния животного в этих случаях осуществляется только благодаря приме- нению измерителя угла относительног отклонения положения барабана 5 от положения оси 15. В нулевой позиции он будет записывать изолинию по центру ЭШ1-09, а в позициях по ходу и против хода барабана 5 изолинии соответственно вьше и ниже центра. Лри этом величина отклонения изолиний от центра пропорциональна активному движению животного направленному на преодоление силы растяжения пружин I2 и 14.
При включении электродвигателя 2 равномерный вращательный момент передается через трансмиссию 3, редуктор 4, выходную ось 15, ленточHjno пружину 14, корпус муфты 13, пружины 12 и кронштейны 11 на барабан 5 с беговой дорожкой 8, осью 10, спидометром 16 и корпусом потен циометра 20.
0319 4Спидометр 16 при этом вырабаты вает электросигнал с постоянными параметрами. Корпус потенциометра 20 синхронно вращается с поводком с 21.Находящееся в барабане 5 живот. нре постепенно затягивается в высшую точку барабана 5 по ходу его движения. Скорость движения барабана 5 и спидометра 16 вследствие этогозамедлятся. Произойдет смещение кор0пуса потенциометра 20 относительно поводка 21, натянутся пружины 12 и 14. Запись сигнала со спидометра 16 и потенциометра 20 происходит ниже
- центральной изолинии. Натяжение
,пружин 12 и 14 достигнет предела ;сопротивляемости для животно го. Барабан 5 останавливается в верхней точ--ке против движения выходной оси 15. Относительный угол поворота потен0циометра 20 относительно поводка 21; составляет максимальнзто величину. Соответствующие записи со спидометра 16 и потенциометра 20 находятся в крайней нижней изолинии.
5
Не вьздержав напряжения пружин 12 и 14,животное срывается с верхней позиции беговой дорожки 8 и перемещается в нижнюю ее часть. Скорость вращения барабана 5 резко возрастает. Ускоряется вращение спидометра 16, относительный угол между корпусом потенциометра 20 и поводком 21 уменьк шается до нуля, что приводит к из- менению записи. Сигнал спидометра
5 16 записьшается в верхней части изолинии, а с потенциометра по центру.
Используя инерцию падения (не прибегая дополнительно к активному натя жению пружины 12 и 14), животное про-
0 бегает нулевую точку барабана 5 и с такой же скоростью перемещается еще некоторое время по беговой дорожке ; 8. При этом пружины 12 и 14 начинают закручиваться и сдерживать бегущее
5 животное. Записываемый потенциал спидометра 16 находится также выше изолинии. Угол поворота корпуса потенциометра 20 от поводка 21 начинает возрастать в другую сторону,
0 вследствие чего запись с него займет верхнюю позицию,
Не в состоянии преодолеть действие пружин 12 и 14,животное повисает на дорожке 8 в верхней точке
5 барабана 5 по ходу его движения
выходной оси 15. Спидометр останавливается. Сигнал с него станет равным нулю, запись его снизится до ниж51130319 , 6
ней точки. Относительный угол откло- О, запись об этом будет вестись
нения корпуса потенциометра 20 отприближаясь к центральной, изолинии. поводка 21 достигнет наибольшей ве- f При перемещении животного в нижличины и запись об этом будет вестисьнюю позицию барабана 5 избыточно
в верхней части от изолинии. 5закрученные пружины 12 и 14 ослабятПостепенно по мере вращения выход-ся. Барабан 5 остановится в нижной оси 15 произойдет равномерное.ней нулевой позиции. Скорость вращеперемещение животного, в нижнююния спидометра 16 станет равной нул,
точку барабана 5. Спидометр совершаета сигнал об этом зафиксируется в
равномерное вращение и образовывает Онижней позиции записи. Угол отклоне--сигналурегистрируемый по центруниЯ вращения корпуса потенциометра
записи в виде изолинии. Угол отклоне--20 от поводка 21 составит О и запись
ния корпуса потенциометра 20 от этом достигнет центральной изоводка 21 равномерно приближается к линии.
УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ АКТИВНЫХ ДВИЖЕНИЙ ЖИВОТНЫХ, содержащее беговую дорожку в виде барабана, корпус которого содержит центральную ось, соединенную с одной | -и:№,«,, I м;; - -« / .-;.:-::;: .Л 1 / -.-.:: - :- --Ч - х-:а05Т,,.дI стороны корпуса через муфту датчика реакции и редуктор с электродвигате- лем,. а с другой стороны корпуса - со спидометром и регистрирующим прибо- ром, от л-и.чающее ся тем, что, с целью повышения точности чественной оценки активных движений животного, в нем на центральной оси установлен измеритель угла отклонения положения барабана от по-г ложения оси муфты датчика реакции, содержащий потенциометр, корпус которого жестко соединен с осью барабана, а поводок подвижного электрода жестко соединен с муфтой g датчика реакции, и трехкольцевой коллектор, кольца которого соединены с электродами потенциометра, а щетки - с регистрирующим прибором., а а 13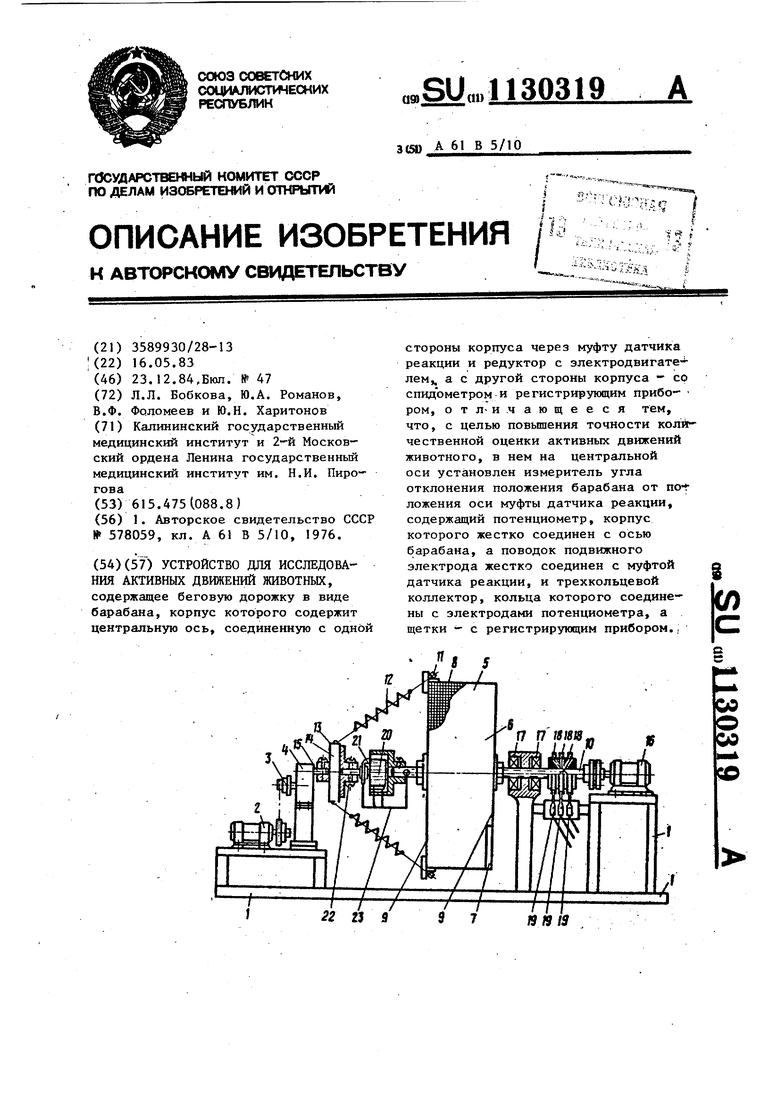
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для исследования активных движений животного | 1976 |
|
SU578059A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
