Изобретение относится к электротехнике, а именно к частотноуправляемым электроприводам на баэе асинхронных машин с фазным ротором, и может быть использовано в системах и механизмах общепромышленного применения, где требуется глубокое регулирование скорости.
Известен электропривод переменного тока, содержащий асинхронную маши ну с фазным ротором, обмотки ротора которой подключены к выходам преобразователя частоты с непосредственной связью, регуляторы фазных токов, блоки прямого и обратного преобразований координат, датчики фазныхтоко статора и ротора, датчики фазных напряжений статора, датчики углового положения и скорости, установленные на валу асинхронной машины с фазным ротором, формирователи управляющих сигналов для составляющих тока ротора, связанные входами с выходами блока обратного преобразования координат и с выходами датчика скорости, при этом выходы формирователей управляющих сигналов для составляющих тока ротора подключены к входам блока прямого преобразования координат, соединенного выходами через регуляторы фазных токов- с управляющими входами преобразователя частоты с непосредственной связыО, ,а входы блока обратного преобразования координат подключены к выходам датчиков фазных токов статора и ротора, к выходам датчиков фазных напряжений статора и к выходам датчика углового положения. jJJ .
Недостатком данного электропривода переменного тока является ограниченный диапазон регулирования скорости.
Наиболее близким к изобретению по технической сущности является электропривод переменного тока, содержащий асинхронную машину с фазным ротором, оомотки которого подключены
IK выходам преобразователя частоты управляющий вход которого соединен с выходом блока управления преобразователем частоты, контактор, снабжег ный катушкой и замыкающкмк контактами, подключенными по одному и обмоткам статора асинхронной машины с фазным ротором, блок коммутаций, входы которого подключены к выходам первого и второго задатчиков управляющих сигналов, к выходу источника питания катушки контактора и к выходу датчика углового положения, установленного на валу асинхронной машины с фазным ротором, при этом первый выход блока коммутаций подключен к входу блока управления преобразователем частоты, а второй выход блока коммутаций подключен к катушке контактора, разделительный трансформатор, снабженный входами для подключения питающей сети и подключенный выходами к дополнительным входам преобразователя частоты и блока управления преобразователем частоты 2 .
Известный электропривод переменного тока характеризуется работой по двум заданным программам, при этом скорость вращения ротора регулируется от нуля до величины, соответствующей двойной синхронной, при предельной частоте тиристорного преобразователя. За счет работы в двух режимах сокращается установленная мощность преобразователя.
Недостатком известного электропривода являются невысокие энергетические показатели при работе на низких скоростях, так как отсутствует возможность раздельного регулирования параметров напряжения, подводимого к статору и ротору, что препятствует получению оптимальных режимов привода.
Целью изобретения является улучшение энергетических показателей электропривода путем снижения активных потерь в обмотках статора и ротора при работе на низких скоростях,
.
Указанная цель достигается тем, что в электропривод переменного то,,.а, содержащий асинхроннзто машину с фазным ротором, обмотки которого подключены к выходам преобразователя частоты, управляющий вход которого Соединен с выходом блока управления преобразователем частоты, контактор, снабженньй катушкой и замыкающими контактами, подключемными по одному к обмоткам статора ат;инхронной машины с фазньтм ротором, блок коммутаций, входы которого подключены к выкодам первого и второго задатчиков управляющих сигналов, к выходу источника питания катушки контактора и
3
к выходу датчика углового положения, установленного на валу асинхронной машины с фазным ротором, при этом первый выход блока коммутаций подключен к входу блока управления преобразователем частоты, а второй к катушке контактора, разделительный трансформатор, снабженный входами для подключения питающей сети и подключенный выходами к дополнительным входам преобразователя частоты и блока управления преобразователем частоты, введены управляемый выпрямитель, согласующий трансформатор, регулятор тока статора, элемент сравнения, масштабный преобразователь, вычислитель составляющих тока ротора, вычислитель модуля тока статора, датчики фазных токов статора и ротора, а блок коммутаций снабжен дополнительным входом, подключенным к выходу вычислителя составляющих тока ротора, входы которого подключены к выходу датчика углового положения и выходам датчиков фазных токов ротора, при этом первый вход элемента сравнения подключен к выходу вычислителя модуля тока статора, соединенного входами с выходами датчиков фазных токов стат pa, второй вход элемента сравнения подключен к выходу масштабного преобразователя, соединенного входами выходами датчиков фазных токов ротора, выход элемента сравнения подключен к первому входу регулятора тока статора, второй вход которого соединен с выходом первого задатчика управляющего сигнада, а выход регулятора тока статора подключен к управ ляющему входу управляемого выпрямителя, соединенного выходами с обмотками статора асинхронной машины с фазным ротором, а входами - с выходами согласующего.трансформатора, снабженного входами для подключения питающей сети.
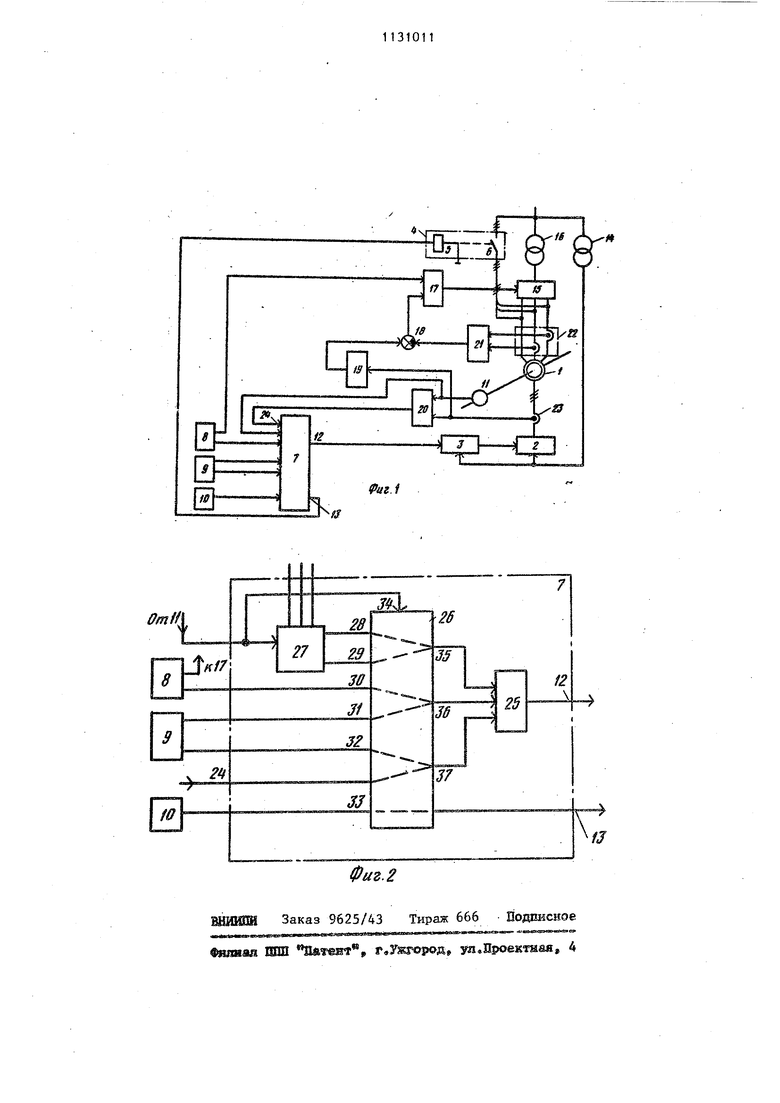
На фиг. 1 представлена функциональная схема электропривода переменого тока; на фиг. 2 - функциональная схема блока коммутаций.
Электропривод переменного тока содержит асинхронную машину 1 (фиг. 1) с фазным ротором, обмотки ротора которой подключены к выходам преобразователя 2 частоты, управляющий вход которого соединен с выходо блока 3 управления преобразователем
114
частоты, контактор 4, снабженный катушкой 5 и замыкающими контактами 6, подключенными по одному к обмоткам статора асинхронной машины 1 с фазным ротором, блок 7 коммутаций, входы которого подключены к выходам первого и второго задатчиков 8 и 9 управляющих сигналов, к выходу источника 10 питания катушки 5 контактора Дик выходу датчика 11 углового положения, установленного на валу асинхронной машины 1 с фазным ротором, при этом первый выход 12 блока 7 коммутаций подключен к входу блока 3 управления преобразователем частоты, а второй выход 13 блока 7 коммутаций подключен к катушке 5 контактора 4, разделительный трансформатор 14, снабженный входами для подключения питающей сети и подключенный выходами к дополнительным входам преобразователя 2 частоты и блока 3 управления преобразователем частоты.
В электропривод переменного тока введены управляемый выпрямитель 15, согласующий трансформатор 16, регулятор 17 тока статора, элемент 18 сравнения, масштабный преобразователь 19, вычислитель 20 составляющих тока ротора, вычислитель 21 модуля тока статора,- датчики 22 фазных токов статора, датчики 23 фазных токов ротора, блок 7 коммутаций снабжен дополнительным входом 24, подключенным к выходу вычислителя
20составляющих тока ротора, входы которого подключены к выходу датчика 11 углового положения и к выходам датчиков 23 фазных токов ротора, при этом первый вход элемента 18 сравнения подключен к выходу вычислителя
21модуля тока статора, соединенного входами с выходами датчиков 22 фазных токов статора, второй вход элемента 18 сравнения подключен к выходу масштабного преобразователя 19, соединенного входш и с выходами датчиков 23 фазных токов ротора, выход элемента 18 сравнения подключен к первому входу регулятора 17 тока статора, второй вход которого соединен с выходом первого задатчика 8 управляющего сигнала, а выход регулятора 17 тока статора подключен к управляющему входу управляемого выпрямителя 15, соединенного выходами
с обмотками статора асинхронной
машины 1 с фазным ротором, а входами - с выходами согласующего трансформатора 16.
Блок 7 коммутаций содержит формирователь 25 (фиг. 2) напряжения управления, коммутатор 26 и формирователь 27 гармонических функций, снабженный входами для подключения питающей сети и входом, подключенным к выходу датчику 11 углового положения, при этом выходы формирова1теля 27 гармонических функций подключены к входам 28 и 29 коммутатора 26, выходы первого 8 и.второго 9 задатч.иков управляющих сигналов подключены соответственно к входам 30-32 коммутатора 26, выход источника 10 питания катушки контактора подключен к входу 33 коммутатора 26, , выход датчика 11 углового положения подключен к входу 34 коммутатора 26, подключенного выходами 35-37 к входа фор шроватвля 25 напряжения управления, выход которого и дополнительный выход коммутатора 26 образуют соответственно первый и второй выходы 12 и 13 блока 7 коммутаций, дополнительный вход 24 которого образован дополнительньм входом коммутатора 7.
Электропривод переменного тока работает следующим образом
В исходном состоянии обмотки статора асинхронной машины 1 с фазным ротором подключены к выходам управ- лаемого вьшрямителя15, а обмотки ротора - к выходам преобразователя 2 частоты. Силовые входы преобразователя 2 частоты через разделительньй трансформатор 14 непосредственно связаны с питающей сетью, а силовые входы управляемого выпрямителя 15 через согласующий трансформатор 16,
Момент М на валу асинхронной машины 1 с фазным ротором определяется выражением
(1)
М К .I sin.
где К - коэффициент пропорциональ-,
ности; It, 7 величины токов статора и
ротора соответственно; Л - угол между векторамитоков
статора и ротора, Электрические потери &Р в обмотках статора и ротора определяются выражением
iP - 3(1..г,,+ I.rJ),
(2)
где r, r - активные сопротивления обмоток статора и рото-ра соответственно. Анализ (2) показывает, что условие минимальных потерь в обмотках статора и ротора (анализируются .выражения: - О,
О
ч it
выполняется при
1Г
11
(3)
Т
«.i.iF(4)
В электроприводе переменного то)ка (фиг. 1) реализуются условия (3) и (А). .
При работе на низких скоростях блок 7 коммутаций управляется по сигналу, поступающему с выхода первого задатчика управляющего сигнала 8. В коммутаторе 26 (фиг. 2) осуществляется соединение входа 28 с выходом 35, входа 30 с выходом 36. Дополнительный вход 24 блока коммутаций соединяется с выходом 37 коммутатора 26.
На вход 28 коммутатора 26 с выхода блока 27 гармонических функций поступают гармонические фу 1кции, определяемые частотой вращения асинхронной машины 1 с фазным ротором и соответствующие сигналам на выходе датчика 11 углового положения.
Сигнал, поступающий с выхода первого задатчика 8 управляющего сигнала, задает сигнал управления для блока 3 управления преобразователем частоты 2, на выходе которого ток начинает изменяться по амплитуде и частоте, Указанньй ток с частотой, пропорциональной частоте вращения вала, питает обмотки ротора асинхронной машины 1 с фазным ротором.
На выходе вычислителя 20 составляющих тока ротора по сигналам с датчиков 23 фазных токов ротора и с датчика 11 углового положения формируются составляющие тока ротора ij, в осях х, у, связанных с вектором тока статора (ось X направлена по направлению вектора тока статора). При этом выполнение необходимого условия (3) для минимума потерь означает необходимость поддержания нулю составляющей тока ротора 1, т.е.
Формируемый на выходе вычислителя 20 составляющих тока ротора сигнал, соответствующий составляющей поступает на дополнительный вход 24 , блока 7 коммутаций. Наличие этого сигнала означает нарушение pejtoiMa минимальных потерь и необходимость корректировки фазы тока ротора, которая осуществляется с помощью формирователя 25 напряжения управления и блока 3 управления преобразователем частоты.
При выполнении корректировка фазы тока ротора не производится.
Выходные сигналы с датчиков 22 фазных токов ротора поступают также на входы масштабного преобразователя 19, на выходе которого формируется сигнал, пропорциональный модулю 1
тока ротора с коэффициентом -J- в
Гд
соответствии с (4). Указанный сигнал поступает на один из входов элемента 18 сравнения, на другой вход которог (поступает сигнал с выхода вычислителя 21 модуля тока статора, пропорциональный модулю тока статора 1.
При выполнении (4) на выходе элемента сравнения появляется сигнал рассогласования, поступающий на вход регулятора 17 тока статора, выполненного в виде пропорционально-; интегрального регулятора с ограничением вьпсодного сигнала. С помощью указанного регулятора при М6М„ обеспечивают задание тока статора в соответствии с (4), а при М.М обеспечивают I const Добычно М„(0,3-0,6) hOM зависит от типа асинхронной машины 1 с фазным ротором).
При работе на скоростях, близких и синхронной , блок 7 коммутаций управляется по сигналу, поступающему с выхода второго задатчика 9 управляющего сигнала. В коммутаторе 26 осуществляется соединение входа 29 с выходом 35, входа 31 с выходом 36, входа 32 с выходом 37. Вход 33 коммутатора соединяется с выходом 13
блока 7 коммутаций. На вход 29 коммутатора 26 с выхода блока 27 гармонических функций поступают гармонические функции, соответствующие частоте скольжения и определяемые по выходным сигналам датчика 11 углового положения и питающей сети.
Катушка 5 контактора 4 получает питание от источника 10 питания, а замыкающие контакты 6 обеспечивают непосредственное подключение обмоток статора асинхронной машины 1 с фазным ротором к питающей сети (при этом управляемый вьтрямитель 15 запирается).
В указанном режиме регулирование, скорости вращения асинхронной машины 1 с фазным ротором осуществляется относительно синхронной изменением частоты и чередованием фаз токов в обмотках ротора.
Таким образом, в электроприводе переменного тока на базе асинхронной машины с фазным ротором введение управляемого выпрямителя 15, согласующего трансформатора 16, вычислителя 20 составляющих тока ротора, вычислителя 21 модуля тока статора, масштабного преобразователя 19, элемента 18 сравнения и регулятора 17 тока статора позволяет обеспечить работу в режиме с низкими скоростями с поддержанием минимума активных потерь в обмотках статора и ротора, а также в режиме околосинхронных скоростей. Регулирование скорости осуществляется в пределах от О до 1,5 синхронной при предельной частоте преобразователя частоты 2-25 Гц, при этом установленная мощность преобразователя 2 частоты не превьшает 50%, а установленная мощность управляемого выпрямителя 15 не превьшгает 10% о мощности электропривода.
Путем снижения активных потерь в юбмотках статора и ротора на 15-20% на низких скоростях в предлагаемом электроприводе-пер еменного тока обеспечиваются более высокие энергетические показатели по сравнению с известным .
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU1083319A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Двухдвигательный электропривод переменного тока | 1985 |
|
SU1292159A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Способ управления машиной двойного питания | 1986 |
|
SU1398062A1 |
ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА, содержащий асинхронную машину с фазным ротором, обмотки которого подключены к выходам преобразователя частоты, управляющий .вход которого соединен с выходом блока управления преобразователем частоты, контактор, снабженный катушкой изамыкающими контактами, подключенными по одному к обмоткам статора асинхронной машины с фазным ротором, блок коммутаций, входы которого подключены к выходам первого и второго задатчиков управляющих сигналов, к выходу источника питания катушки контактора и к выходу датчика углового положения, установленного на валу асинхронной машины с фазным ротором, при этом первый выход блока коммутаций подключен к входу блока управления преобразователем частоты, а второй - к катушке контактора, разделительный трансформатор, снабженный входами для подключения питающей сети и подключенный выходами к дополнительным входам преобразователя частоты и блока управления преобразователем частоты, отличающийся тем, что,с целью улучшения энергетических показателей путем снижения активных потерь в обмотках статора и ротора, в него введены управляемый выпрямитель, согласующий трансформатор, регулятор тока статора, элемент сравнения, масштабный преобразователь, вычислитель составляющих тока ротора, вычислитель модуля тока статора, датчики фазных токов статора и ротора, а блок коммутаций снабжен дополнительным входом, подключенным к выходу вычислителя составляющих тока ротора, входы которого подключены к вы(Л ходу датчика углового положения и выходам датчиков фазных токов ротора, при этом первый вход элемента сравнения подключен к выходу вычислителя модуля тока статора, соединенного входами с выходами датчиков фазных токов статора, второй вход элемента сравнения подключен к выходу масштабного преобразователя, сое W диненного входами с выходами датчиков фазных токов ротора, выход эле- : мента сравнения подключен к первому входу регулятора тока статора, второй вход которого соединен с выходом первого задатчика управляющего сигнала, а выход регулятора тока статора подключен к управляющему входу управляемого выпрямителя, соединенного выходами с обмотками статора.асинхронной машины с фазным ротор.рм, а входами - с выходами согласующего трансформатора, снабженного входами для подключения питающей сети.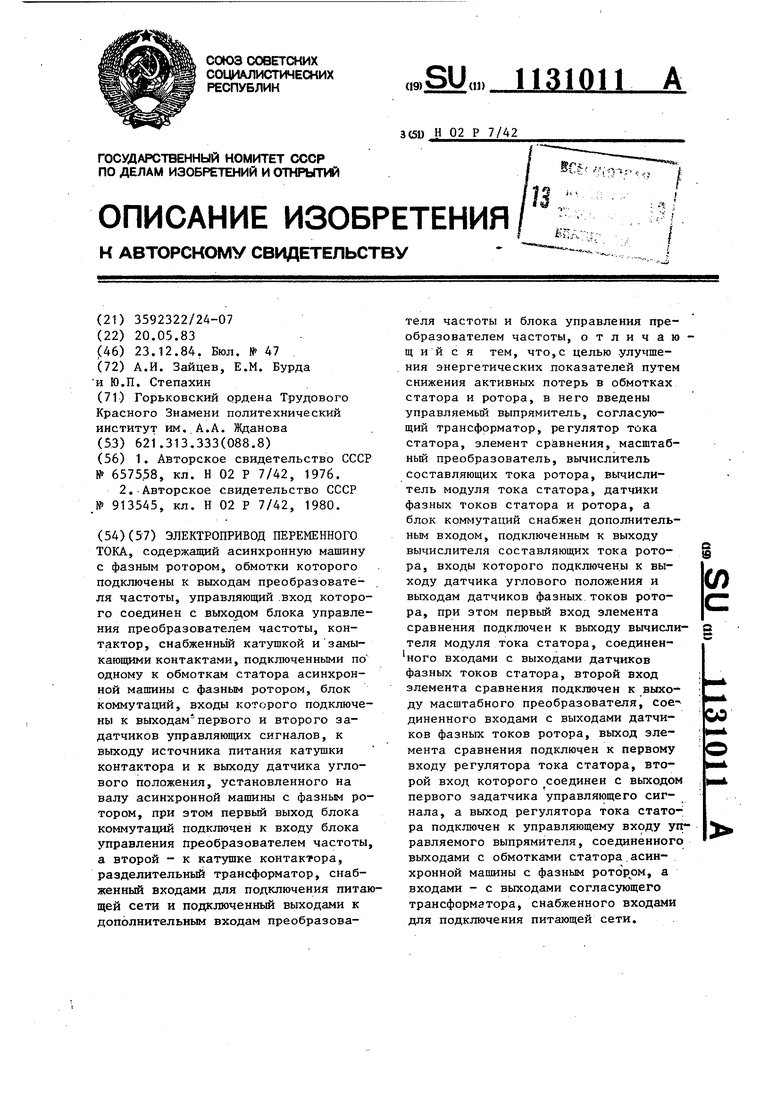
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 913545, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
