«.«
00
со
00
о
О5
ю
Изобретение относится к электротехнике, а именно к управляемому электроприводу переменного тока, построенному на основе машины двойного питания, статор которой через выключатель подключается к питающей сети, а ротор - к вентильному преобразователю частоты.
Входы трехфазного блока 9 раздельного управления подключены к выходам датчика 8 токов фаз ротора и к инверсным выходам триггеров 25-23,
Вторая группа вькодов трехфазного блока 9 раздельного управления подключена к одним из выходов схем 12- 14 совпадения, другие входы которых

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| Система бесперебойного электроснабжения | 1989 |
|
SU1677778A1 |
| Устройство для частотного пуска синхронной машины | 1983 |
|
SU1099368A1 |
| Устройство для частотного управления асинхронным двигателем с фазным ротором | 1977 |
|
SU743152A1 |
| Электропривод с импульсным управлением | 1987 |
|
SU1515308A1 |
| Устройство для частотного пуска синхронной машины | 1981 |
|
SU964933A1 |
| Устройство для управления преобразователем переменного напряжения асинхронного двигателя | 1982 |
|
SU1097156A1 |
| Агрегат бесперебойного электроснабжения | 1988 |
|
SU1658281A1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Способ управления машиной двойногопиТАНия | 1979 |
|
SU838994A1 |
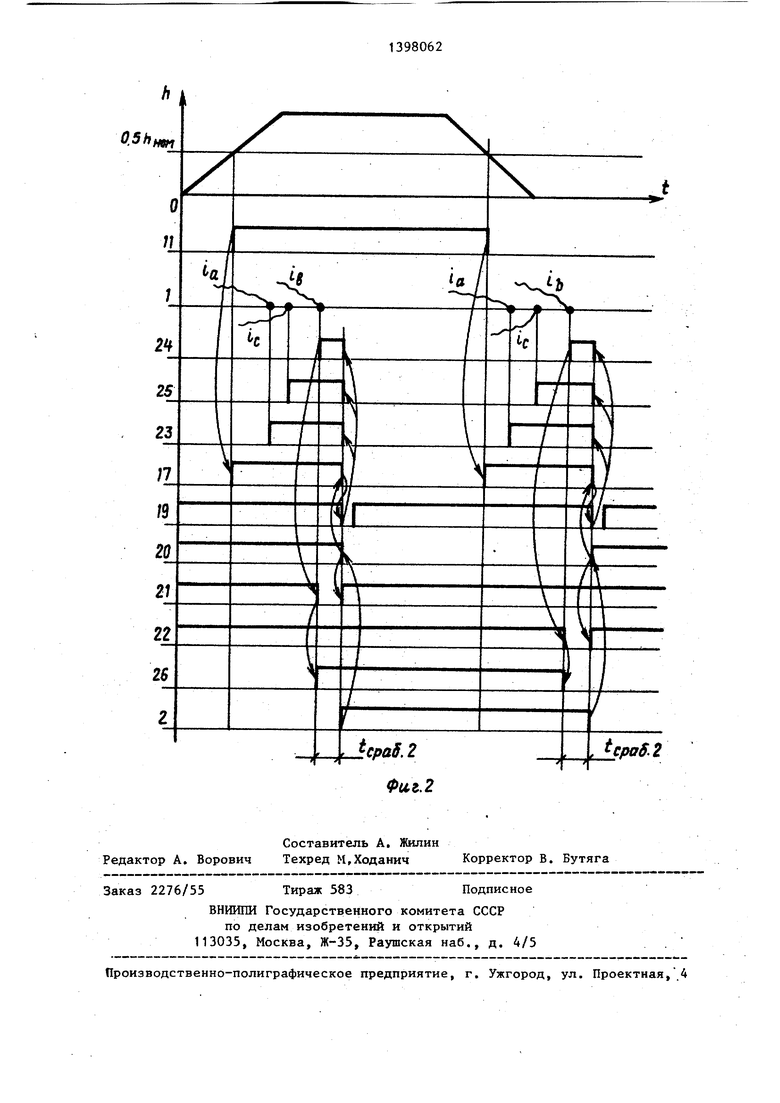
Изобретение относится к электротехнике. Целью изобретения является повьшение быстродействия и надежности путем полного обесточивания обмоток машины двойного питания при коммутациях в статоре. Указанная цель достигается тем, что при осуществлении способа управления машиной двойного питания подключение обмоток статора к сети и -регулирование напряжения на обмотках ротора машины двойного питания осуществляют в момент достижения частотой вращения ротора значения, равного половине синхронной частоты вращения в момент обесточивания всех обмоток ротора. Для этого перед размыканием обмоток статора машины двойного питания 1 выключателем 2 блокировкой с триггеров 23, 24, 25 устройства раздельного управления 9)по моментам перехода токов ротора через нуль, определяемых схемами совпадени я 12,13,14, запрещают подачу импульсов управления на тиристоры преобразователя частоты 5 до обесточивания всех фаз ротора. 2 ил. (О
Целью изобретения является повьше- соединены с инверсным выходом схемы
ние быстродействия и надежности путем полного обесточивания обмоток машины двойного питания при коммутациях в статоре.
На фиг. 1 представлена функцио- j нальная схема устройства электропривода переменного тока, реализующего способ управления машиной двойного питания; на фиг. 2 - диаграмма, поясняющая работу электропривода. 20
Электропривод переменного тока содержит машину двойного питания, вьшолненную на базе асинхронного электродвигателя 1 (фиг. 1) с фазным ротором, выключатель 2, выполненный 25 .с управляемым трехфазным короткозамы- кателеми блок-контактом,датчик 3 положения ротора и датчик 4 частоты вращения, установленные на валу указанного асинхронного электродвигате- , ля 1, преобразователь 5 частоты, под- ключенньй выходами к обмоткам ротора асинхронного электродвигателя 1, систему 6 управления преобразователем частоты, регулятор 7 частоты враще17 совпадения, входы которой соединены с инверсными выходами схемы 15 совпадения, вьшолненной с инверсными входами и, схемы 16 совпадения, вьшолненной с прямыми входами,входы которых соединены перекрестно с вы-, ходами соответственно схемы 20 совпадения и порогового элемента 11, выходы которого соединены соответственно с выходом датчика 4 частоты вращения. Один вход соответственно триггеров 23,24 и 25 соединен с выходом схем совпадения соответственно 12, 13 и 14, а другой вход - с инверсным выходом схемь 19 совпадения, инверсные входы которой соединены с выходами соответственно схемы 28 задержки вход которой соединен с выходом схемы 20 совпадения и схемы 28 задержки, вход которой соединен с выходом схемы ТВ совпадения,входы которой соединены с выходом схемы 20 совпадения. Прямой вход схемы 21 совпадения и инверсный вход схемы 22 совпадения соединены с выходом схемы
ния, датчик 8 токов фаз ротора,трех- 35 20 совпадения,другие входы схем 21 и 22 Фазный блок 9 раздельного управления, систему 10 блокировки импульсов управсовпадения соединены соответственно с прямыми выходами соответственно триггеров 23, 2ft к 251 инверсные выходы схем 21 и 22 совпадения соединены с
совпадения соединены соответственно с прямыми выходами соответственно триггеров 23, 2ft к 251 инверсные выходы схем 21 и 22 совпадения соединены с
ментом 11, двухвходовыми схемами 1220 совпадения, четырехвходовыми схе- 0 установочными входами триггера 26, нами 21 и 22 совпадения, триггерами прямой выход которого соединен с уп- 23-26 и схемами 27 и 28 задержки. равляющей катушкой выключателя 2.
Статорные обмотки асинхронного двигателя 1 предназначены для подютю- чения к питающей сети через выключа- 45 что все коммутации в статорных цепях тель 2, управляющие входы преобразо- осуществляются при их полном обеспеСущность способа управления машино двойного питания заключается в том.
вателя 5 частоты подключены к выходу системы 6 управления и к первой группе выходов трехфазного блока 9 раздельного управления.
Выходы системы 6 управления соединены с входами регулятора 7 частоты вращения, с вьпсодом датчика 3 положения и с инверсным выходом схемы 20 совпадения, входы которой соединены с блок-контактом выключателя 2. Вход регулятора 7 частоты вращения подключен к выходу датчика 4 частоты вращения.
соединены с инверсным выходом схемы
17 совпадения, входы которой соединены с инверсными выходами схемы 15 совпадения, вьшолненной с инверсными входами и, схемы 16 совпадения, вьшолненной с прямыми входами,входы которых соединены перекрестно с вы-, ходами соответственно схемы 20 совпадения и порогового элемента 11, выходы которого соединены соответственно с выходом датчика 4 частоты вращения. Один вход соответственно триггеров 23,24 и 25 соединен с выходом схем совпадения соответственно 12, 13 и 14, а другой вход - с инверсным выходом схемь 19 совпадения, инверсные входы которой соединены с выходами соответственно схемы 28 задержки вход которой соединен с выходом схемы 20 совпадения и схемы 28 задержки, вход которой соединен с выходом схемы ТВ совпадения,входы которой соединены с выходом схемы 20 совпадения. Прямой вход схемы 21 совпадения и инверсный вход схемы 22 совпадения соединены с выходом схемы
20 совпадения,другие входы схем 21 и 22
20 совпадения,другие входы схем 21 и 22
совпадения соединены соответственно с прямыми выходами соответственно триггеров 23, 2ft к 251 инверсные выходы схем 21 и 22 совпадения соединены с
установочными входами триггера 26, прямой выход которого соединен с уп- равляющей катушкой выключателя 2.
что все коммутации в статорных цепях осуществляются при их полном обеспеСущность способа управления машиной двойного питания заключается в том.
чивании за счет снятия управляющих импульсов преобразователя частоты.
После окончания коммутаций вновь подают управляющие импульсы на преобразователь частоты. Синхронизация частоты напряжения на выходе преобразователя частоты с частотой ЭДС ротора в момент включения обмоток статора на сеть достигается тем, что датчики частоты вращения и углового положения непрерьшно .следят за фактической частотой вращения и угловым положением ротора.
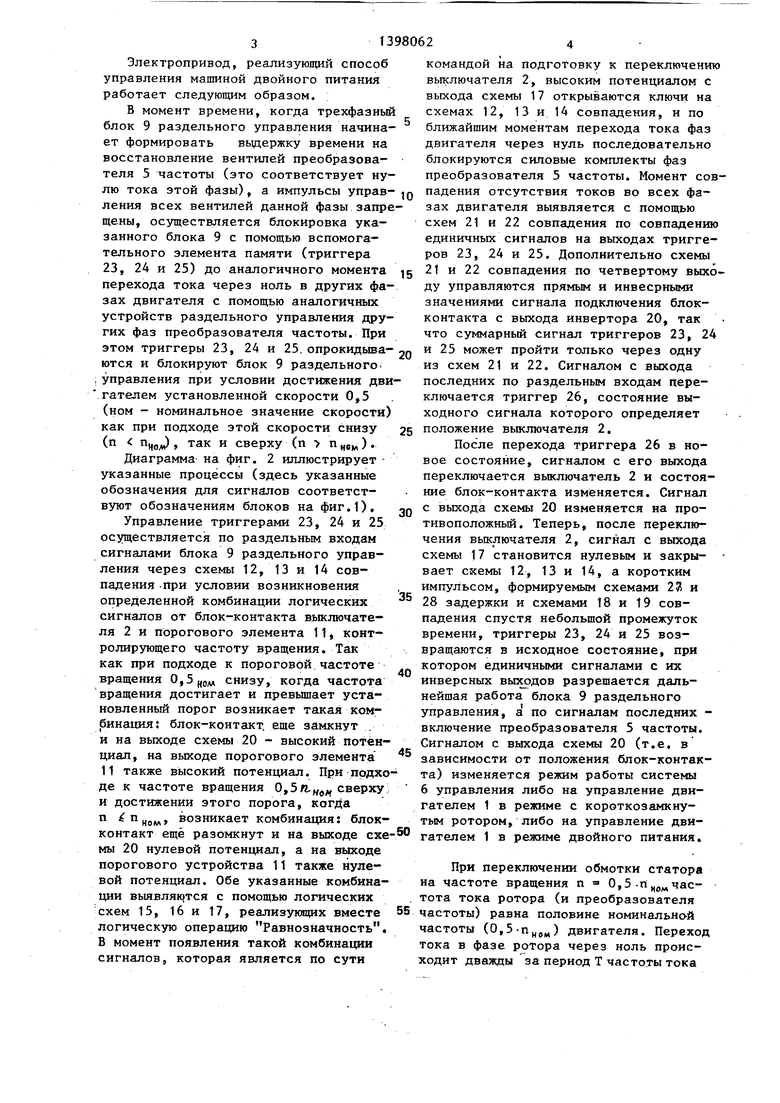
Электропривод, реализующий способ управления машиной двойного питания работает следующим образом.
В момент времени, когда трехфазный блок 9 раздельного управления начинает формировать вьщержку времени на восстановление вентилей преобразователя 5 частоты (это соответствует нулю тока этой фазы), а импульсы управ- Q ления всех вентилей данной фазы.запрещены, осуществляется блокировка указанного блока 9 с помощью вспомогательного элемента памяти (триггера 23, 24 и 25) до аналогичного момента 5 перехода тока через ноль в других фазах двигателя с помощью аналогичных устройств раздельного управления других фаз преобразователя частоты. При этом триггеры 23, 24 и 25, опрокидыва- 2п ются и блокируют блок 9 раздельного. управления при условии достижения дви- гателем установленной скорости 0,5 (ном - номинальное значение скорости) как при подходе этой скорости снизу (п Пцод, так и сверху (п п „Q ).
Диаграмма на фиг. 2 иллюстрирует - указанные процессы (здесь указанные обозначения для сигналов соответствуют обозначениям блоков на фиг.1).
Управление триггерами 23, 24 и 25 осуществляется по раздельным входам сигналами блока 9 раздельного управления через схемы 12, 13 и 14 совпадения при условии возникновения определенной комбинации логических сигналов от блок-контакта выключателя 2 и порогового элемента 11, контролирующего частоту вращения. Так как при подходе к пороговой частоте вращения 0,5„(,дд снизу, когда частота вращения достигает и превышает установленный порог возникает такая комбинация: блок-контакт, еще замкнут и на выходе схемы 20 - высокий потён25
30
35
40
45
циал, на выходе порогового элемента 11 также высокий потенциал. При-подхо- де к частоте вращения 0, сверху: и достижении этого порога, когда
п п
НОАЛ
возникает комбинация: блок„
контакт еще разомкнут и на выходе схе мы 20 нулевой потенциал, а на выходе порогового устройства 11 также нулевой потенциал. Обе указанные комбинации выявляк}тся с помощью логических схем 15, 16 и 17, реализуницих вместе логическую операцию Равнозначность, В момент появления такой комбинации сигналов, которая является по сути
„
Q 5
командой на подготовку к переключению выключателя 2, высоким потенциалом с выхода схемы 17 открываются ключи на схемах 12, 13 и 14 совпадения, и по ближайшим моментам перехода тока фаз двигателя через нуль последовательно блокируются силовые комплекты фаз преобразователя 5 частоты. Момент совпадения отсутствия токов во всех фазах двигателя выявляется с помощью схем 21 и 22 совпадения по совпадению единичных сигналов на выходах триггеров 23, 24 и 25. Дополнительно схемы 21 и 22 совпадения по четвертому выходу управляются прямым и инвесрными значениями сигнала подключения блок- контакта с выхода инвертора 20, так что суммарный сигнал триггеров 23, 24 и 25 может пройти только через одну из схем 21 и 22. Сигналом с выхода последних по раздельным входам переключается триггер 26, состояние выходного сигнала которого определяет 5 положение выключателя 2.
После перехода триггера 26 в новое состояние, сигналом с его выхода переключается выключатель 2 и состояние блок-контакта изменяется. Сигнал с выхода схемы 20 изменяется на противоположный. Теперь, после переключения выключателя 2, сигнал с выхода схемь 17 становится нулевым и закрывает скемы 12, 13 и 14, а коротким импульсом, формируемым схемами 27 и 28 задержки и схемами 18 и 19 совпадения спустя небольшой промежуток времени, триггеры 23, 24 и 25 возвращаются в исходное состояние, при котором единичными сигналами с их инверсных вызсрдов разрешается дальнейшая работа блока 9 раздельного управления, а по сигналам последних 0
5
0
45
50
включение преобразователя 5 частоты. Сигналом с выхода схемы 20 (т.е. в зависимости от положения блок-контакта) изменяется режим работы системы 6 управления либо на управление двигателем 1 в режиме с короткозамкну- тым ротором, либо на управление двигателем 1 в режиме двойного питания.
При переключении обмотки статора на частоте вращения п 0, . тота тока ротора (и преобразователя 55 частоты) равна половине номинальной частоты (0 5-Пцд„) двигателя. Переход тока в фазе ротора через ноль происходит дважды за период Т частоты тока
рЬтора, также блокировка импульсов управления вентильными комплектами преобразователя частоты происходит по сигналам блока раздельного управления д в алады за период. В трехфазной системе задержка при переключении статорной цепи на питающую сеть (и обратно) после возникновения сигнала н выходе порогового элемента 11 оп- р|еделяется последовательными и ближайшими моментами перехода тока через ноль в трех фазах ротора и составит в сумгче не более 3 Т/3 при соединении фрз ротора в треугольник (так как нужно ждать обесточивание всех трех фаз последовательно) и 2 Т/3 - при соединении в звезду без нуля (так как обесточивание двух фаз приводит к
овесточиванию и третьей). При частоте2о подключают их к питающей сети и одно- сети 50 Гц это составляет 0,02 и 0, 013 с С:0ответственно. К этой выдержке добавится время срабатывания контактора, которое также составит несколько современно подают на обмотки ротора регулируемого напряжения от преобразователя частоты в соответствии с требуемым режимом работы машины двойного питания, отличающийся тем, что, с целью повышения быстродействия и надежности путем полного обесточивания обмоток машины двойного питания при коммутациях в статоре.
тьгх секунды, что существенно меньше времени, необходимого зз известном решении на ряд операций, а именно: уменьшение активного тока ротора до нуля, изменение частоты преобразователя до частоты вращения ротора и по-зо Р достижении частоты вращения ротоследующего затем размыкания обмоток статора без подключения их к сети, синхронизации ЭДС статора с частотой сети путем регулирования частоты и ф|азы тока преобразователя частоты и подключения статорной цепи к сети.
Таким образом, благодаря полному обесточиванию обмоток двигателя при к|оь1мутациях в статорной цепи, а также рассмотренному порядку снятия импульсов управления с преобразователя частоты, способ управления машиной двойного питания обеспечивает более высокую надежность и повышение быстродействия электропривода.
Формула изобретения
Способ управления машиной двойного питания, при котором статорные обмотки закорачивают, подводят от раздельных силовых комплектов преобразователя частоты напряжения к обмоткам ротора, увеличивают выходную частоту преобразователя частоты и контролируют возрастающую частоту вращения ротора, фиксируют момент достижения указанной частотой вращения значения,равного половине синхронной частоты вра- щения, размыкают обмотки статора и
подключают их к питающей сети и одно-
временно подают на обмотки ротора регулируемого напряжения от преобразователя частоты в соответствии с требуемым режимом работы машины двойного питания, отличающийся тем, что, с целью повышения быстродействия и надежности путем полного обесточивания обмоток машины двойного питания при коммутациях в статоре.
5
ра значения, равного половине синхронной частоты вращения, контролируют токи в обмотках ротора, производят поочередное отключение силовых комплектов преобразователя частоты от соответствующих обмоток ротора при переходе соответствующего тока ротора через ноль, а указанное размыкание обмоток статора, подключение их к питающей сети и регулирования напряжения на обмотках ротора производят в момент обесточивания всех обмоток ротора.
05Н
нвп
jtcpaS.2
| 1969 |
|
SU411597A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления машиной двойногопиТАНия | 1979 |
|
SU838994A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
