2. Привод по п. 1, о т л и
ч а ющ и и с я тем, что привод снабжен
датчиками натяжения канатов и устройством дистанционной сигнализации,

| название | год | авторы | номер документа |
|---|---|---|---|
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| МОБИЛЬНЫЙ СТАНОК-КАЧАЛКА | 2011 |
|
RU2479751C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 1993 |
|
RU2056532C1 |
| СКВАЖИННАЯ НАСОСНАЯ УСТАНОВКА | 1991 |
|
RU2022172C1 |
| Привод скважинного штанговогоНАСОСА | 1979 |
|
SU802608A1 |
| ДЛИННОХОДОВОЙ БЕЗБАЛАНСИРНЫЙ ПРИВОД ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2016 |
|
RU2640309C2 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2455526C1 |
| Станок-качалка | 1980 |
|
SU866274A1 |
| Станок-качалка | 1979 |
|
SU905511A1 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |
1. БЕЗБАЛАНСИРНЫЙ ПРИВОД СКВАЖИННОЙ ШТАНГОВОЙ НАСОСНОЙ УСТА НОВКИ, содержащий стойку с двумя т вами, приводной механизм с кривоши пом, шатунами, траверсой и с блоком траверсы, подвеску колонны шта и канат, соединяющий подвеску с тр версой через шкивы и блок траверсы отличающийся тем, что, с целью повышения надежности, на L fn.j стойке привода дополнительно установлены два шкива, а на траверсе дополнительный блок, привод снабжен дополнительным канатом и рамкой со штоком, расположенным в отверстии траверсы, и двумя блокайи, размещенными в верхней и нижней частях рамки , расположенной нгш траверсой в плоскости с ней между блоком траверсы и дополнительным блоком с возможностью ограниченного nepeMenjeния между траверсой и шкивами и регулирования ее положения относительно траверсы, причем шток рамки снабжен упорами, скрепленными с возможностью взаимодействия с траверсой р в крайних положениях рамки, а подвес-SS ка колонны гЗтанг соединена с траверсой канатом через два крайних шкива, блок траверсы, дополнительный блок и через нижний блок рамки, а также дополнительным канатом - через два средних шкива и верхний блок рамки.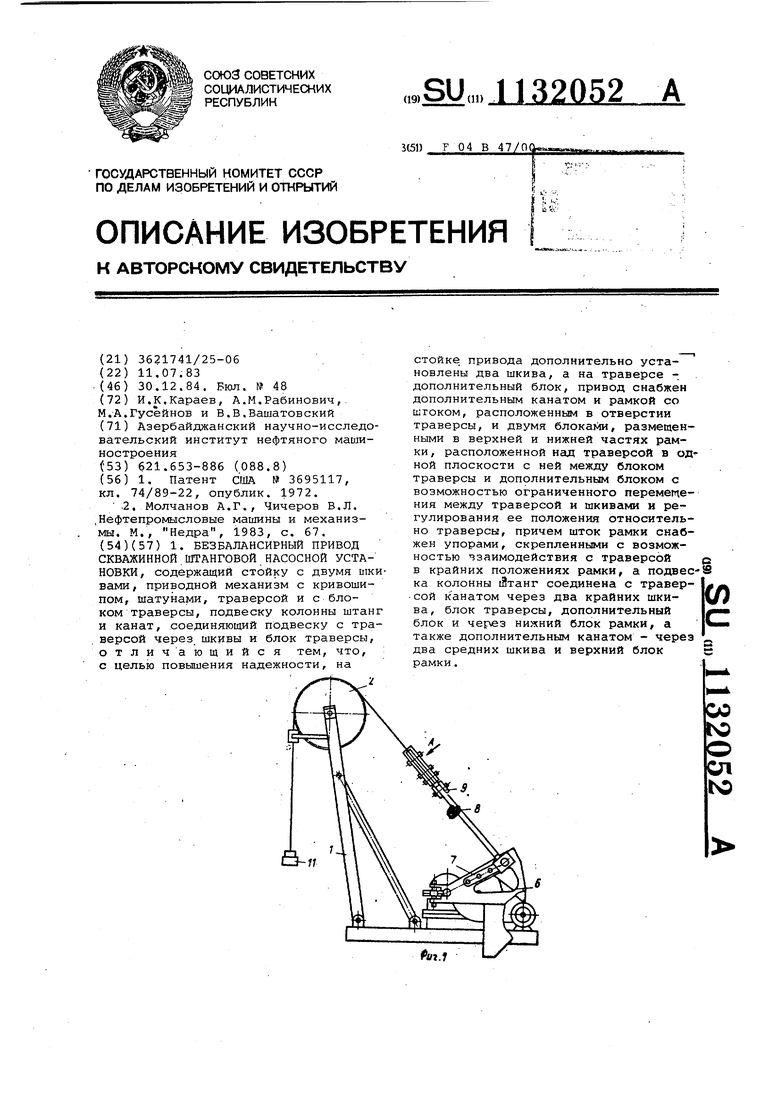
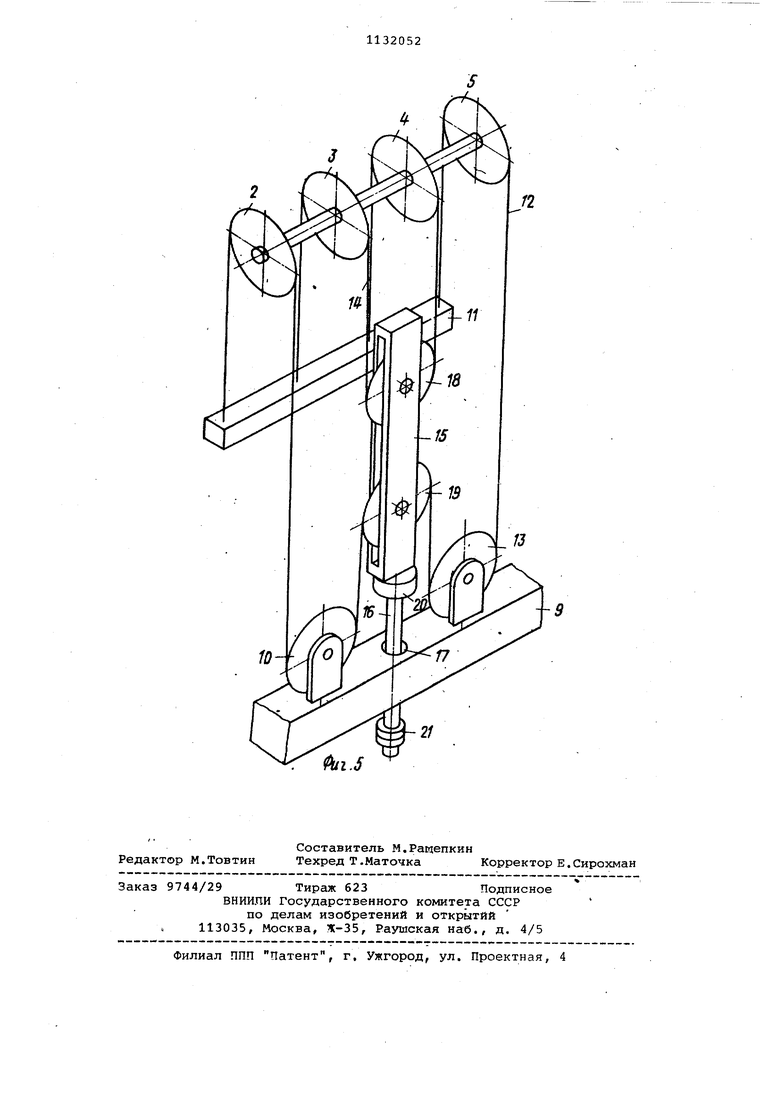
Изобретение относится к технике добычи нефти и,, в частности, может быть использовано в приводе скважин ных штанговых насосных установок. Известен-безбалансирный привод насосной установки, содержащий стой ку, расположенный на ней реверсивны двигатель, редуктор и барабан с канатами , связанными с подвеской колонны штанг и противовесами Y . Недостатком известного привода является его сложность, обусловленная системой управления реверсом двигателя. Известен также безбалансирный привод насосной установки, содержащий стойку с двумя шкивами, приводной механизм с кривошипом, шатунами траверсой и с блоком .траверсы, подвеску колонны штанг и канат, соединяющий подвеску с траверсой через шкивы и блок траверсы 2 . Недостатком данного пркйОДа яв|ляется низкая надежность, обусловленная аварийным характером отказов связанных с обрывом гибкого звенаканата вследствие того, что освободившаяся после обрыва от каната тра верса падает на стойку и воздейству ет на нее усилием, создаваемым приводным механизмом. Цель изобретения - повышение надежности работы привода. Указанная цель достигается тем, что в приводе, содержащем стойку с двумя шкивами, приводной механизм с кривошипом, шатунами, траверсой и с блоком траверсы, подвеску колонны штанг и канат, соединяющий подвеску с траверсой через шкивы и блок траверсы, на стойке привода дополнител но установлены два шкива, а на траверсе - дополнительный блок, привод снабжен дополнительным канатом и рамкой со штоком, расположенным в отверстии траяерсы, и двумя блоками размещенными в верхней и нижней час тях рамки,, расположенной над траверсой в одной плоскости с ней между блоком траве сы и дополнительным блоком с возможностью ограниченного перемещения между траверсой и шкивами и регулирования ее положения относительно траверсы, причем шток рам ки снабжен упорами, скрепленными с возможностью взаимодействия с травер сой н крайних положениях рамки, а подвеска колонны штанг соединена с траверсой канатом через два крайних шкива, блок траверсы, дополнитель ный блок и через нижний блок рамки, а также дополнительным канатом - через два средних шкива и верхний блок рамки, Привод также снабжен датчиком натяжения канатов и устройством дистанционной сигнализации. На фиг.1 схематически изображен безбалансирный привод. Общий вид, на фиг.2 - верхняя часть привода, вид слева, на фиг.З - вид А на Фиг.1; на фиг.4 - разрез Б-Б на фиг. (датчики натяжения канатов и сигнализирующее устройство) , на фиг.5 - кинематическая схема привода. Безбалансирный привод состоит из. стойки 1 со шкивё1ми 2-5, приводного механизма 6 с кривошипом 7, шатунами 8, траверсой 9, с блоком 1О траверсы 9, подвески колонны штанг 11 и каната 12. На траверсе 9 установлен дополнительный блок 13, а привод снабжен дополнительным канатом 14 и рамкой 15 со штоком 16, расположенным в отверстии 17 траверсы 9, и двумя блоками 18 и 19, размещенными соответственно в верхней и нижней частях рамки 15, расположенной над траверсой 9 в одной плоскости с ней между блоком 10 траверсы 9 и дополнительным блоком 13 с возможностью ограниченного перемещения между траверсой 9 и ткивамя 25 и регулирования ее положения относительно .траверсы 9. Шток 16 рамки 15 снабжен упорами 20 и 21, закрепленными с возможностью, взаимодействия с траверсой в крайних положениях рамки 15, а также датчиками 22 натяжения канатов 12 и 14 и устройством дистанционной сигнализации 23. Привод работает следующим образом. Приводной механизм 6 приводит в движение траверсу 9, которая посредством канатов 12 и 14 приводит подвеску 11 колонны штанг в возвратнопоступательное движение. Рамка 15 предварительно устанавливается так, чтобы имелся зазор между траверсой 9 и упорами 20 и 21, что достигается регулированием длины .канатов 12 и 14.
В процессе эксплуатации привода, в случае обрыва одного из канатов 12 и 14, равновесие 15 нарушается и она перемещается относительно траверсы 9 в соответствующую сторону до конTakTa одного из упоров 20 и 21 с Tgasepcoft 9, причем датчик 22 натяжения канатов 12 и 14 подаетсигвд
об обрыве одного из канатов на устройство дистанционной сигнализации 23.
Предлагаемая конструкция беэбалансирного привода позволяет повысить надежность работы привода и упрос.тить контроль за его эксплуатацией.
Б-6
Фиг Л
Фиг.б
/2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент CFUA 3695117, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Молчанов А.Г., Чичеров В.Л | |||
| .Нефтепромысловые машины и механизмы | |||
| М., Недра, 1983, с | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
