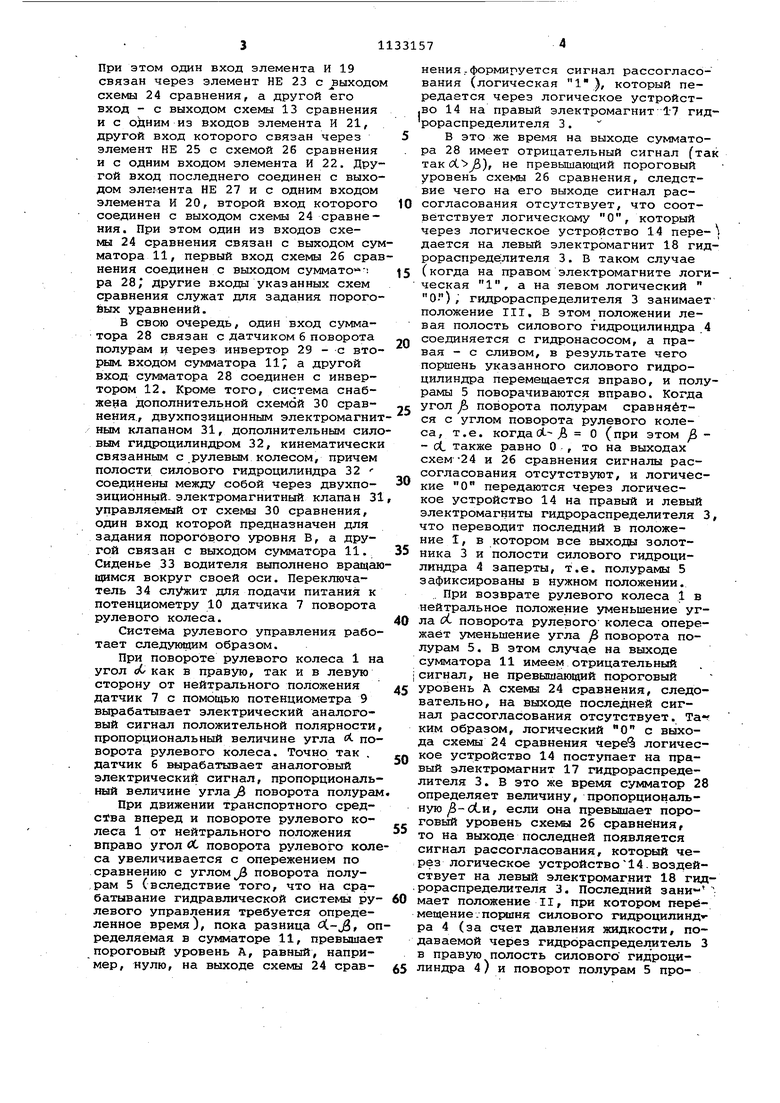
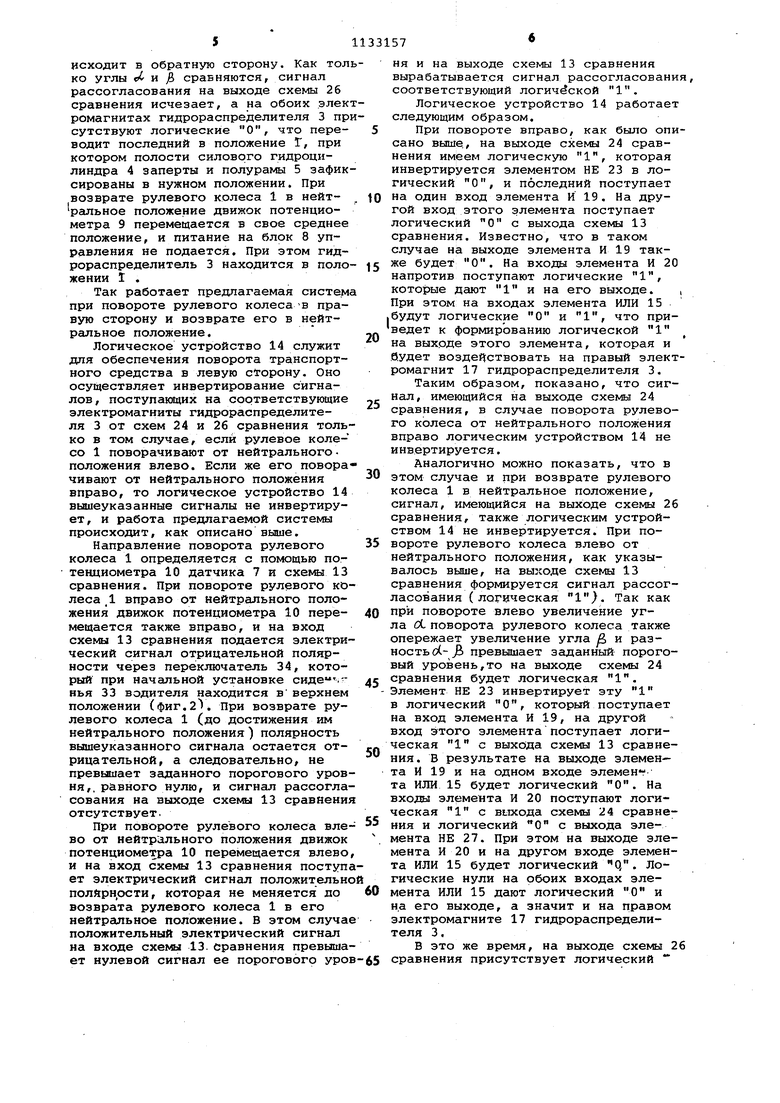
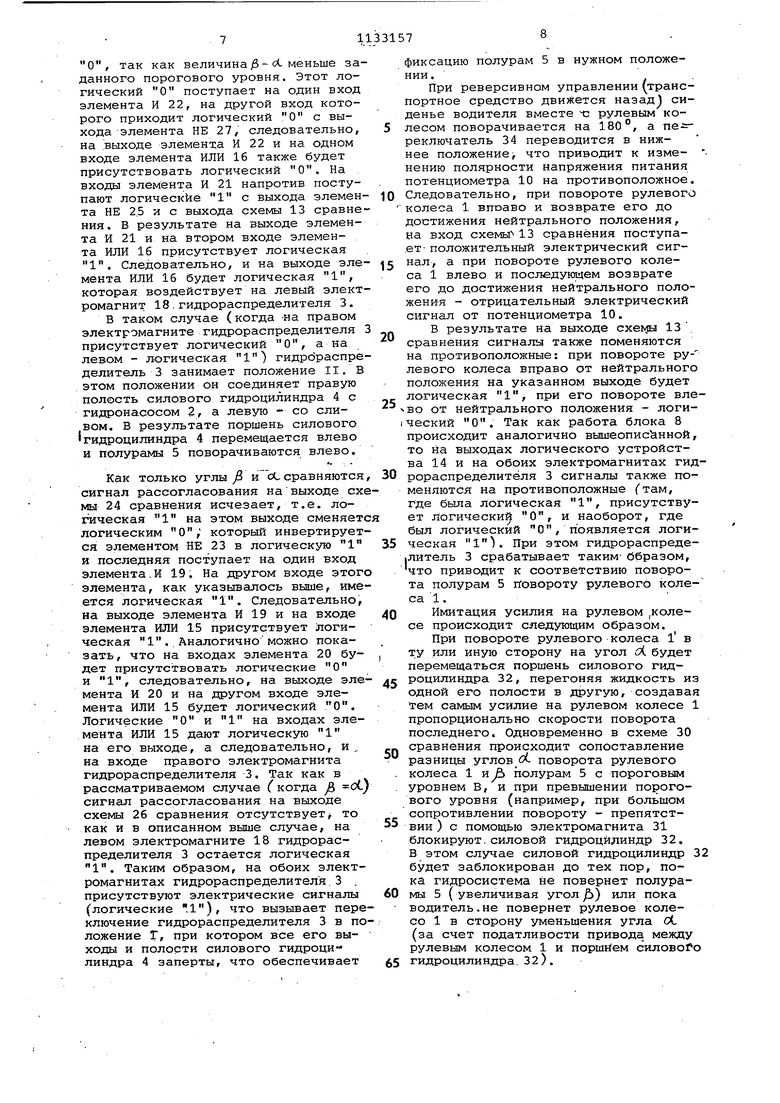
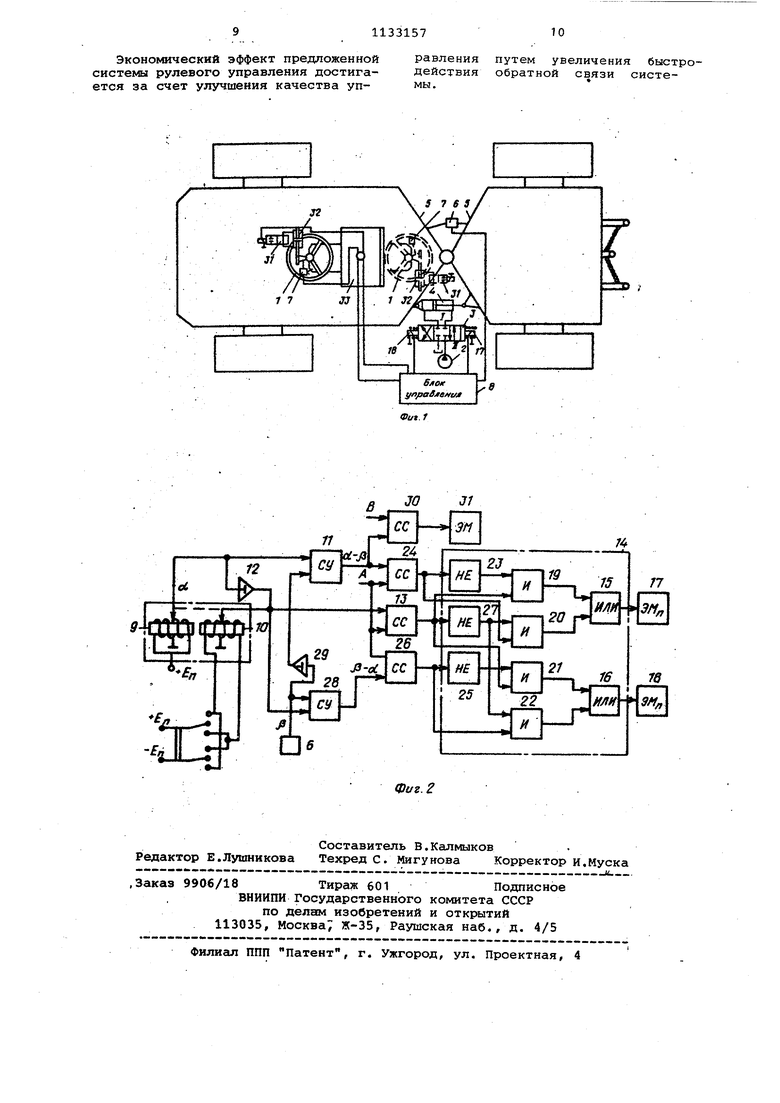
Изобретение относится к автотрак торостроению, а именно к системам рулевого управления транспортных средств. Известна система рулевого управления транспортного средства, содержащая гидрораспределитель рулево го управления, гидравлически соединенный с гидронасосом, с гидробаком и исполнительным гидроцилиндром поворота, механически связанным с сек циями шарнирно.сочлененного транспортного средства, рулевое колесо, кинематически связанное с датчиком поворота рулевого колеса и датчик шэворота секций шарнирно сочлененного транспортного средства iD. Недостатком известной системы является наличие гидравлической обратной связи,что приводит к недостаточно высокому быстродействию системы рулевого управления. Цель изобретения - улучшение качества управления за счет увеличения быстродействия системы. Поставленная цель достигается тем, что система рулевого управления транспортного средства, содержащая гидрораспределитель рулевого управления, гидравлически соединенный с гидронасосом, с гидробаком и исполнительным гидроцилиндром поворота,- механически соединенньш с сек циями шарнирно сочлененного транспортного средства, рулевое колесо, кинематически связанное с датчиком поворота рулевого колеса, и датчик поворота секций шарнирно сочлененного транспортного средства , снабжена блоком управления, состоящим и двух HHB spTopoB, трех логических эл ментсэв НЕ, двух сумматоров, трех схем сравнения, четырех логических элементов И и, двух логических элементов ИЛИ, гидрораспределитель рулевого Управления выполнен электроуправляемЕли, а датчики поворота рулевого колеса и секций.шарнирно сочлененного транспортного средства в виде потенциометров, при этом выход одного потенциометра датчика по ворота рулевого колеса соединен с входом первого сумматора и через пе ,вый инвертор - с входом второго сум матора,. выхода датчика поворота сек ций соединен с Другим входом второг сумматора и через второй инвертор с другим вxoдo 4 первого сумматора выход которого соединен с входом первой схемы сравнения, вход второй схема сравнения соединен с выходе другого потенциометра датчика поворота рулевого колеса, третьей схемы сравнения соединен с выходом второго сумлатора, а ее выход - с входами первого логического элемента НЕ и первого логического элемента И, выход второй схемы сравнения соединен с входами второго логического элемента НЕ, второго и третьего логических элементов И, выход первой схемы сравнения соединен с входами четвертого логического элемента И и третьего логического элемента НЕ7 выходы первого, второго и третьего логических элементов НЕ соединены соответственно с другими входами первого, второго и третьего логических элементов и, а выход второго логического элемента НЕ соединен также с другим входом первого логического элемента И, а выходы первого, второго, третьего и четвертого логических элементов И соединены соответственно с входами первого и второго логических элементов ИЛИ, выходы которых соединены с электромагнитами электроуправляемого гидрораспределителя рулевого управления. Система снабжена двухпозиционным электромагнитным клапаном, дополнительной схемой сравнения и кинематически связанным с рулевым колесом дополнительным силовым гидроцилиндром, полости которого соединены между собой через двухпозиционный электромагнитный клапан, электрически соединенный с выходом дополнительной схемы сравнения, вход которой соединен с выходом первого сумматора. На фиг.1 изображена схема рулевого управления транспортного средства; на фиг,2 - функциональная схема электронного блока управления. Система рулевого управления транспортного средства содержит рулевое колесо i; гидронасос 2, распределитель 3 рулевого управления, исполнительный гидроцилиндр 4, связанный с полурамами 5. Кроме этого, в систему включены датчик б поворота полурам 5, датчик 7 поворота рулевого колеса 1, связанные с блоком 8 управления. Датчик 7 поворота рулевого колеса состоит из двух потенциометров 9 и 10. Потенциометр 9 служит для определения угла поворота рулевого колеса и соединен с первым входом сумматора 11 и с инвертором 12. Потенциометр 10 служит для определения направления поворота рулевого колеса и соединен с входом схемы 13 сравнения, другой вход которой предназначен для задания порогового Уровня А. Логическое устройство 14 блока управления содержит логические элементы НЕ, И и ИЛИ. Логические элементы ИЛИ 15 и 16 связаны с соответствунадими электромагнитными устройствами 17 и 18 гидрораспределителя 3, а каждый из входов элемента ИЛИ 15 - с соответствующими выходами элементов И 19 и 20 каждый из входов элемента ИЛИ 16 соединен; в свою очередь, с соответствующими выходами элементов К 21 к 22, При этом один вход элемента И 19 связан через элемент НЕ 23 с выходом схемы 24 сравнения, а другой его вход - с выходом схемы 13 сравнения и с одним из входов элемента И 21, другой вход которого связан через элемент НЕ 25 с схемой 26 сравнения и с одним входом элемента И 22. Другой вход последнего соединен с выходом элемента НЕ 27 и с одним входом элемента И 20, второй вход которого соединен с выходом схемы 24 сравнения. При этом один из входов схемы 24 сравнения связан с выходом сум матора 11, первый вход схемы 26 срав нения соединен с выходом суммато--: ра 28, Другие входы указанных схем сравнения служат для задания порогобых уравнений. В свою очередь, один вход сумматора 28 связан с датчиком б поворота полурам и через инвертор 29 - с вторьом. входом сумматора 117 э другой вход сумматора 28 соединен с инвертором 12. Кроме того, система снабжена дополнительной схемой 30 сравнения., двухпозиционным электромагнит ным клапаном 31, дополнительным сило вым гидроцилиндром 32, кинематически связанным с рулевым колесом, причем полости силового гидроцилиндра 32 соединены между собой через двухпозиционный. электромагнитный клапан 3 управляемый от схемы 30 сравнения, один вход которой предназначен для задания порогового уровня В, а другой связан с выходом сумматора 11. Сиденье 33 водителя выполнено вращаю щимся вокруг своей оси. Переключатель 34 служит для подачи питания к потенциометру 10 датчика 7 поворота рулевого колеса. Система рулевого управления рабо тает следующим образом. При повороте рулевого колеса 1 н угол оС как в правую, так и в левую сторону от нейтрального положения датчик 7 с помощью потенциометра 9 вырабатывает электрический аналоговый сигнал положительной полярности пропорциональный величине угла по ворота рулевого колеса. Точно так . датчик 6 вырабатывает аналоговый электрический сигнал, пропорциональ ный величине угла поворота полурам При движении транспортного средctBa вперед и повороте рулевого колеса 1 от нейтрального положения вправо угол Л, поворота рулевого кол са увеличивается с опережением по сравнению с углом поворота полу,рам 5 (вследствие того, что на срабатывание гидравлической системы ру левого управления требуется определенное время), пока разница .-j6 о ределяемая в сумматоре 11, превышае пороговый уровень А, равный, например, нулю, на выходе схемы 24 сравнения-формируется сигнал рассогласования (логическая 1 ), который передается через логическое устройство 14 на правый электромагнит 1-7 гидрораспределителя 3. В это же время на выходе сумматора 28 имеет отрицательный сигнал fTak так с.), не превышающий пороговый уровень схемы 26 сравнения, следствие чего на его выходе сигнал рассогласования отсутствует, что соответствует логическому О, который через логическое устройство 14 пере- дается на левый электромагнит 18 гидрораспределителя 3. В таком случае (когда на правом электромагните логическая 1, а на левом логический О) , гидрораспределителя 3 занимает положение III, В этом положении левая полость силового гидроцилиндра .4 соединяется с гидронасосом, а правая - с сливом, в результате чего поршень указанного силового гидроцилиндра перемещается вправо, и полурамы 5 поворачиваются вправо. Когда угол поворота полурам сравняется с углом поворота рулевого колеса, т.е. когда Л-j5 О (при этом ft - Ci также равно О , то на выходах схем-24 и 26 сравнения сигналы рассогласования отсутствуют, и логические О передаются через логическое устройство 14 на правый и левый электромагниты гидрораспределителя 3, что переводит последний в положение I, в котором все выходы золотника 3 и полости силового гидроцилиндра 4 заперты, т.е. полурамы 5 зафиксированы в нужном положении. . При возврате рулевого колеса 1 в нейтральное положение уменьшение угла d. поворота рулевого колеса опережает уменьшение угла уВ поворота полурам 5. В этом случае на выходе сумматора 11 имеем отрицательный сигнал, не превышанидий пороговый уровень А схемы 24 сравнения, следовательно, на выходе последней сигнал рассогласования отсутствует. ТаКИМ образом, логический О с выхода схемы 24 сравнения чере9 логическое устройство 14 поступает на правый электромагнит 17 гидрораспределителя 3. В это же время сумматор 28 определяет величину, пропорциональную -сСи, если она превышает пороговый уровень схемы 26 сравнения, то на выходе последней появляется сигнал рассогласования, который через логическое устройство14.воздействует на левый электромагнит 18 гидрораспределителя 3. Последний зани- мает положение II, при котором перемещение . поршня силового ГИДРОЦИЛИНД ра 4 (за счет давления жидкости, подаваемой через гидрораспределитель 3 в правую полость силового гидроцилиндра 4) и поворот полурам 5 происходит в обратную сторону. Как тол ко углы pi и ;8 сравняются, сигнал рассогласования на выходе схемы 26 сравнения исчезает, а на обоих элек ромагнитах гидрораспределителя 3 пр сутствуют логические О, что переводит последний в положение Г, при котором полости силового гидроцилиндра 4 заперты и полурамы 5 зафик сированы в нужном положении. При возврате рулевого колеса 1 в нейтральное положение движок потенциометра 9 перемещается в свое среднее положение, и питание на блок 8 управления не подается. При этом гидрораспределитель 3 находится в поло жении I . Так работает предлагаемая систем при повороте рулевого колеса в правую сторону и возврате его в нейтральное положение, Логическое устройство 14 служит для обеспечения поворота транспортного средства в левую сторону. Оно осуществляет инвертирование сигналов, поступающих на соответствующие электромагниты гидрораспределителя 3 от схем 24 и 26 сравнения толь ко в том случае, если рулевое колесо 1 поворачивают от нейтрального положения влево. Если же его позора чивают от нейтрального положения вправо, то логическое устройство 14 вышеуказанные сигналы не инвертирует, и работа предлагаемой системы происходит, как описано выше. Направление поворота рулевого колеса 1 определяется с помощью потенциометра 10 датчика 7 и cxevm 13 сравнения. При повороте рулевого ко леса Д вправо от нейтрального положения движок потенциометра 10 перемещается также вправо, и на вход схемы 13 сравнения подается электрический сигнал отрицательной полярности через переключатель 34, который при начальной установке .-нья 33 водителя находится в верхнем положении (фиг,2. При возврате рулевого колеса 1 (до достижения им нейтрального положения) полярность вышеуказанного сигнала остается отрицательной, а следовательно/ не превшаает заданного порогового уров ня,, равного нулю, и сигнал рассогласования на выходе схемы 13 сравнения отсутствует. При повороте рулевого колеса вле во от нейтрального положения движок потенциометра 10 перемещается влево и на вход схемы 13 сравнения поступ ет электрический сигнал положительно полйрн,ости, которая не меняется до возврата рулевого колеса 1 в его нейтральное положение, В этом случа положительный электрический сигнал на входе схемы 13. сравнения превыша ет нулевой сигнал ее порогового уро ня и на выходе схемы 13 сравнения вырабатывается сигнал рассогласования, соответствующий логической 1. Логическое устройство 14 работает следующим образом. При повороте вправо, как было описано выше, на выходе схемы 24 сравнения имеем логическую 1, которая инвертируется элементом НЕ 23 в логический О, и последний поступает на один вход элемента И 19, На другой вход этого элемента поступает логический О с выхода схемы 13 сравнения. Известно, что в таком случае на выходе элемента И 19 также будет О, На входы элемента И 20 напротив поступают логические 1, которые дают 1 и на его выходе, , При этом на входах элемента ИЛИ 15 будут логические О и 1, что приведет к формированию логической 1 на выходе этого элемента, которая и будет воздействовать на правый электромагнит 17 гидрораспределителя 3, Таким образом, показано, что сигнал, имеющийся на выходе схемы 24 сравнения, в случае поворота рулевого колеса от нейтрального положения вправо логическим устройством 14 не инвертируется, Аналогично можно показать, что в этом случае и при возврате рулевого колеса 1 в нейтральное положение, сигнал, имеющийся на выходе схемы 26 сравнения, также логическим устройством 14 не инвертируется. При повороте рулевого колеса влево от нейтрального положения, как указывалось выше, на выходе схемы 13 сравнения формируется сигнал рассогласования (логическая 1), Так как при повороте влево увеличение угла ОС поворота рулевого колеса также опережает увеличение угла и разность o(-jB превышает заданный пороговый уровень,то на выходе схемы 24 сравнения будет логическая 1, Элемент НЕ 23 инвертирует эту 1 в логический О, который поступает на вход элемента И 19, на другой вход этого элемента поступает логическая 1 с выхода схемы 13 сравнения, В результате на выходе элемента И 19 и на одном входе элемен та ИЛИ 15 будет логический О, На входы элемента И 20 поступают логическая 1 с выхода схемы 24 сравнения и логический О с выхода элемента НЕ 27, При этом на выходе элемента И 20 и на другом входе элемента ИЛИ 15 будет логический О/, Ло гические нули на обоих входах элемента ИЛИ 15 дают логический О и на его выходе, а значит и на правом электромагните 17 гидрораспределителя 3. В это же время, на выходе схемы 26 сравнения присутствует логический О, так как величина -d меньше за данного порогового уровня. Этот логический О поступает на один вход элемента И 22, на другой вход которого приходит логический О с выхода элемента НЕ 27, следовательно на выходе элемента И 22 и на одном входе элемента ИЛИ 16 также будет присутствовать логический О. На входы элемента И 21 напротив поступают логические 1 с выхода элемен та НЕ 2.5 и с выхода схемы 13 сравне ния. В результате на выходе элемента И 21 и на втором входе элемента ИЛИ 16 присутствует логическая 1, Следовательно, и на выходе эле мента ИЛИ 16 будет логическая 1, которая воздействует на левый элект ромагнит 18.гидрораспределителя 3. В таком случае (когда -на правом электромагните гидрораспределителя присутствует логический О, а на левом - логическая 1) гидрораспре делитель 3 занимает положение II. В этом положении он соединяет правую полость силового гидроцилиндра 4с гидронасосом 2, а левую - со сливом, В результате поршень силового гидроцилиндра 4 перемещается влево и полурамы 5 поворачиваются влево. Как только углы ;8 и сС сравняются сигнал рассогласования на выходе сх мы 24 сравнения исчезает, т.е. лона этом выходе сменяет гическая логическим который инвертирует ся элементом НЕ 23 в логическую 1 и последняя поступает на один вход элемента-И 19, На другом входе этог элемента, как указывалось выше, име ется логическая 1. Следовательно на выходе элемента И 19 и на входе элемента ИЛИ 15 присутствует логическая 1..Аналогичноможно показать, что на входах элемента 20 будет присутствовать логические О и 1, следовательно, на выходе эле мента И 20 и на другом входе элемента ИЛИ 15 будет логический О. Логические на входах элемента ИЛИ 15 дают логическую 1 на его выходе, а следовательно, и , на входе правого электромагнита гидрораспределителя 3. Так как в рассматриваемом случае ( когда оС сигнал рассогласования на выходе схемы 26 сравнения отсутствуетj то как и в описанном выше случае, на левом электромагните 18 гидрораспределителя 3 остается логическая 1. Таким образом, на обоих электромагнитах гидрораспределителя,3 . присутствуют электрические сигналы (логические 1), что вызывает пере ключение гидрораспределителя 3 в по ложение Г, при котором все его выходы и полости силового гидроцилиндра 4 заперты, что обеспечивает фиксацию полурам 5 в нужном положении . При реверсивном управлении (транспортное средство движется назад сиденье водителя вместе С рулевым колесом поворачивается на 180, а пе реключатель 34 переводится в нижнее положение, что приводит к изме- нению полярности напряжения питания потенциометра 10 на противоположное. Следовательно, при повороте рулевого колеса 1 впоаво и возврате его до достижения нейтрального положения, ра вход схемы 13 сравнения поступает- положительный электрический сигнал, а при повороте рулевого колеса 1 влево и последующем возврате его до достижения нейтрального положения - отрицательный электрический сигнал от потенциометра 10. В результате на выходе 13 сравнения сигналы также поменяются на противоположные: при повороте рулевого колеса вправо от нейтрального положения на указанном выходе будет логическая 1, при его повороте влевo от нейтрального положения - логический О. Так как работа блока 8 происходит аналогично вышеописанной, то на выходах логического устройства 14 и на обоих электромагнитах гидрораспределитёля 3 сигналы также поменяются на противоположные (там, где была логическая 1, присутствует логически: О, и наоборот, где был логический О, появляется логическая 1. При этом гидрораспределитель 3 срабатывает таким-Образом, что приводит к соответствию поворота полурам 5 повороту рулевого колеса 1. Имитация усилия на рулевом ,колесе происходит следующим образом. При повороте рулевого колеса 1 в ту или иную сторону на угол й(. будет перемещаться поршень силового гидроцилиндра 32, перегоняя жидкость из одной его полости в другую, создавая тем самым усилие на рулевом колесе 1 пропорционально скорости поворота последнего. Одновременно в схеме 30 сравнения происходит сопоставление разницы углов 5t поворота рулевого колеса 1 и полурам 5 с пороговым уровнем В, и при превышении порогового уровня (например, при большом сопротивлении повороту - препятствии ) с помощью электромагнита 31 блокируют.силовой гидроцйлиндр 32. В этом случае силовой гидроцилиндр 32 будет заблокирован до тех пор, пока гидросистема не повернет полурамы 5 (увеличивая угол jb) или пока водитель.не повернет рулевое колесо 1 в сторону уменьшения угла оС (за счет податливости привода между рулевым колесом 1 и поршйем силовоРо гидроцилиндра. 32).
Экономический эффект предложенной системы рулевого управления достигается за счет улучшения качества управления путем увеличения быстродействия обратной связи системы.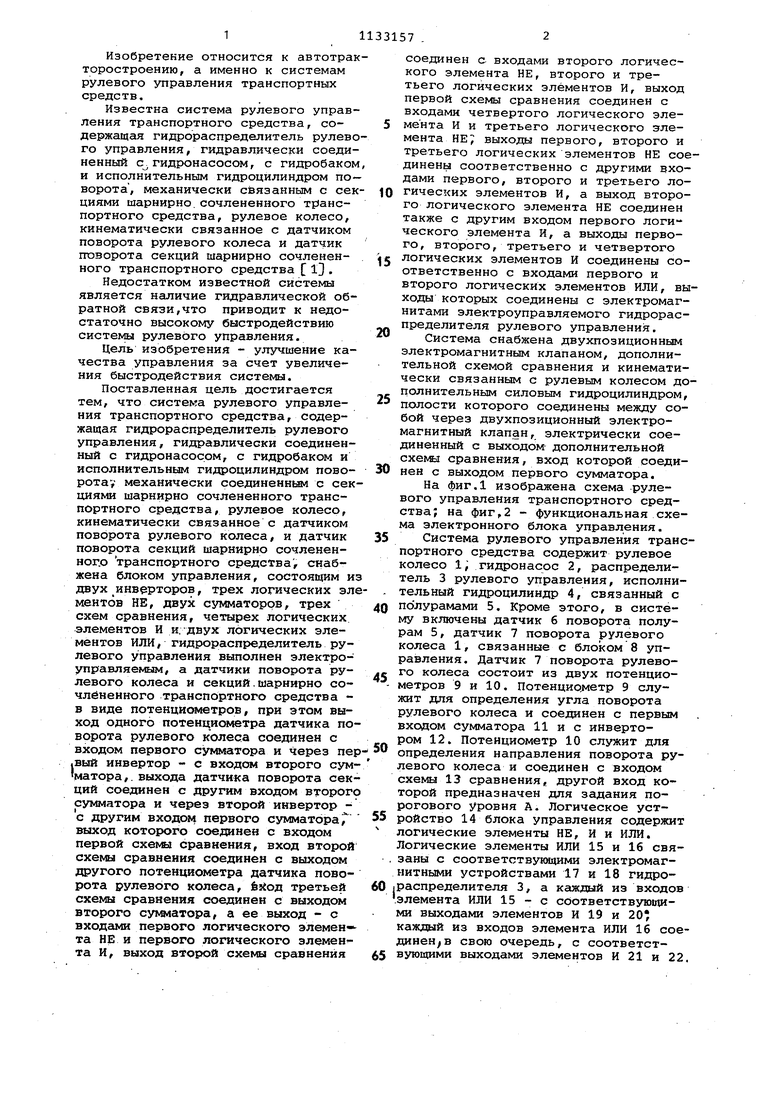
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления курсом движения колесной землеройно-транспортной машины | 1987 |
|
SU1514882A1 |
| Система рулевого управления транспортного средства | 1989 |
|
SU1622213A1 |
| Транспортное средство с активным прицепом | 1986 |
|
SU1456326A1 |
| Система рулевого управления колесной машины с четырьмя управляемыми колесами | 1978 |
|
SU745757A1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| Система управления блокировкой дифференциала колесного транспортного средства | 1985 |
|
SU1298102A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
1. СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащая гидрораспределитель рулевого управления, гидравлически соединенный с гидронасосом, с гидробаком и исполнительным гидроцилиндром поворота, механически соединенным с секциями ыарнирно сочлененного транспортного средства, рулевое колесо, кинематически связанное с датчиком поворота рулевого колеса, и датчик поворота секций шарнирно сочлененного транспортного средства, отличающаяся тем, что, с целью улучшения качества управления за счет увеличения быстродействия системы, она снабжена блоком управления, состоящим из двух инверторов; трех логических элементов НЕ, двух сумматоров, трех схем сравнения, четырех логических элементов И к двух логических элементов ИЛИ, гидрораспределитель рулевого управления выполнен электроуправляемым, а датчики поворота рулевого колеса и секций шарнирно сочлененного транспортного средства.- в виде потенциометров , при этом выход одного потен-. циометра датчика поворота рулевого колеса соединен с входом первого сумматора и через первый инвертор с входом второго сумматора, выход датчика поворота секций соединен с другим входом второго сумматора и через второй инвертор - с другим входом первого сумматора, выход которого соединен с входом первой схемы сравнения, вход второй сравнения соединен с выходом другого потенциометра датчика поворота рулевого колеса, вход третьей схемы сравнения соединен с выходом второго сумматора, а ее выход - с входами первого логического1 элемента НЕ и первого логического элемента И, выход второй схемы сравнения соединен с входами второго логического элемента НЕ, второго и третьего логических элементов И, выход первой схемы сравнения соединен с входами четвертого логического элемента И и третьего логического элемента НЕ, выходы первого, второго т и третьего логических элементов НЕ соединены соответственно с другими входами первого, второго и третье- , го логических элементов И, а выход второго логического элемента НЕ соединен такж с другим входом первого логического элемента И, а выходы первого, второго, третьего и четверсо оо того логических элементов И соединены соответственно с входами первого и второго логических элементов ИЛИ, выходы которых соединены с электромагнитами : электроуправляемоел го гидрораспрёделителя рулевого управления . 2. Система поп, 1, отличающаяся тем, что,она снабжена двухпозиционным электромагнитным клапаном, дополнительной схемой сравнения и кинематически связанным с рулевым колесом дополнительным силовйм гидроцилиндром, полости которого соединены между собой через двухпозиционный электромагнитный клапан, электрически соединенный с выходом дополнительной схемы сравнения, вход которой соединен с выходом первого сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
