(54) СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСНОЙ МАШИНЫ С ЧЕТЫРЬМЯ УПРАВЛЯЕМЫМИ КОЛЕСАМИ
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2137649C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА С ПЕРЕДНИМИ И ЗАДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2000 |
|
RU2186701C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2105688C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2517396C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2001 |
|
RU2196696C1 |
| Система рулевого управления транспортного средства | 1989 |
|
SU1622213A1 |
| Гидравлическая система рулевого управления колесного транспортного средства | 1985 |
|
SU1279898A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2157774C2 |
| Способ управления движением колесных тракторов и устройство для его осуществления | 1978 |
|
SU782730A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138418C1 |
1
Изобретение относится к машиностроению, более конкретно к системам рулевого управления колесных, машин с четырьмя управляемыми колесами.
Известна система рулевого управления колесной машины с четырьмя управляемыми колесами, содержащая механизм ручного управления поворотом передних колес и механизм управления поворотом задних колес l.
Недостатком этой системы рулевого управления является механическая связь передних управляемых колес с программным устройством поворота задннх колес, что увеЛ1П1нвает вес привода, усложняет его монтаж и эксплуатацию, а также не обеспечивает возможности регулирования программы поворота задних колес.
Известна также система рулевого управления колесной машины с четырьмя управляемыми колесами, содержащая механизм ручного управления поворотом передних колес и механизм управления поворотом задннх 1Колес, включающий электроуправляемый распределитель, соединенный гидролиниями с источником давления, баком и рабочими полостями исполнительного гидроцилиндра
поворота задних колес, и электрическую систему управления упомянутым распределителем, состоящую из блока питания, соединенного с датчиками положения передних и задних управляемых колес, с сумматором и с усилителем, причем последний связан с электромагнитами управляемого распределителя, а датчики положения передних и задних управляемых колес - через сумматор с усилителем 2.
Недостатком данной системы является
10 невысокие эксплуатационные характеристи: ки системы из-за отсутствия обеспечения прогмаммного следящего управления пово ротом задних колес с запаздыванн ем относительно передннх колес.
Цель изобретения - улучшение эксплу15атационных характеристик системы путем обеспечения программного следящего управления поворотом задних колес с запаздыванием относительно передних колес, обеспечение возможностн регулирования запаздывания поворота задних колес относительно передних, обеспечение возможности подключения устройства запаздывания как при правостороннем, так и при левостороннем повороте.
УкаЗаййая цель достигается тем, что система снабжена устройством запаздывания, установленным между сумматором И усилителем и содержащим два регулируемых сопротивления, один контакт каждого из которых соединен с выходом сумматора, второй контакт через двухпозиционный переключатель, электрический мост, состоящий из трех последовательно соединенных сопротивлений с блоком питания, а третий подвижный контакт - с входом усилителя; одно из трех последовательно соединенных сопротивлений выполнено переменным, подвижный контакт которого соединен с массой машины, а также тем, что система снабжена тягой, один конец которой соединен с ручным управлением поворота передних колес, а другой - с упомянутым двухпозиционным переключателем.
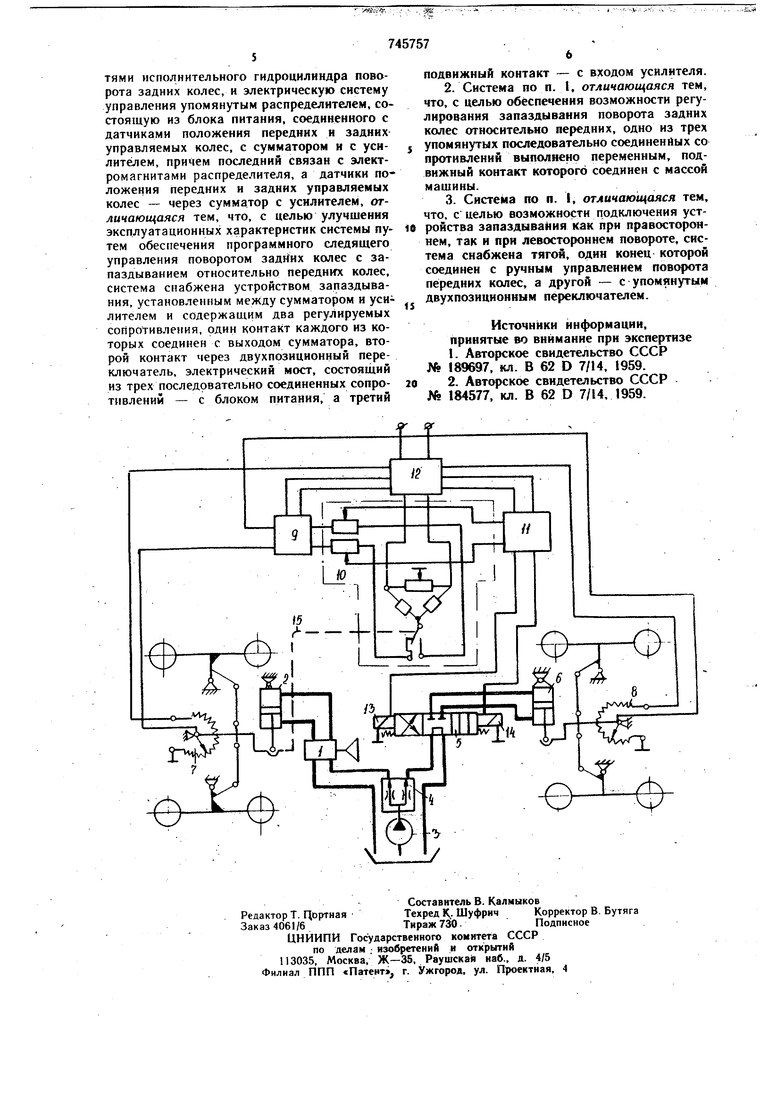
На чертеже изображена электрогидравлическая схема релрвого управления колесной машины.
Система рулевого управления колесной машины с четырьмя управляемыми колесами содержит гидравлическую часть, имеющую гидроусилитель 1 управления передними колесами, гидроцилиндр 2 пОвброта передних колес, насос 3, делитель потока 4, электроуправляемый гидрораспределитель 5 управления задними колесами, гидроцилиндр 6 поворота задних колес. Электрическая часть, имеющая датчик 7 положения НёрёДнйх кбЛеС, ШпоЛнёна в ВйЖе потенциометра. Датчик 8 положения задних колес закреплен на неподВий ной задней трапеции и выполнен в виде потенциометра. Система тзкже содержит сумматор 9, устройство 10 запаздывания, усилитеь 11, блок питания 12, соленоиды 13 и 14 управления эЛектроупраВляейого гидрораспределителя управления задними колесами, тягу 15 управления двухпрзициониым переключателем устройства запаздывания.
Рулевой привод работает следующим образом.
При1 овд|ю ё 1бДйтёлём 5 Шг8 колеса с помощью гидроусилителя управления гидроцилиндр 2 посредством рычагов и тяг передней трапеции повор;ачивает передние колеса, используя энергию части потока рабочей жидкости, подаваемой насосом 3 через делитель потока 4. При этом датчик 7 положения передних колес, закрепленный на передней трапеции, выдает на сумматор 9 сигнал, пропорциональный величине угла поворота передних колес. В сумматоре 9 сигналы управления от датчика 7 cpaвнивaJOтcя с сигналами обратной связи, вырабатываемыми датчиком 8 положения задних колес, где и игГреДеЛяётся разность, Этих сигналов в виде тока рассогласования. В усилителе 11 ток рассогласования усиливается до тока управления, который затем поступает на обмотку соответствующего соленоида 13 и 14 управления электроуправляемого гидрораспределителя 5, преобразуясь в механическое перемещение золотиика, а затем в механическую энергию движения штока силового цилиндра 6, который посредством рычагов и тяг задней трапеции поворачивает в соответствующую сторону задние колеса, используя энергию второй части потока рабочей жидкости, подаваемой насосом 3 через делитель потока 4. Одновременно с поворотом задних колес изменяются сигналы обратной связи, вырабатываемые датчиком 8. При полном соответствии положений передних и задних колес машины и, соответственно, сигналов датчиков 7 и 8 рассогласование в сумматоре 9 oTcytCTByeT, и поворот задних ко лес прекращается. Аналогично работает рулевой привод и при повороте передннх колес в другую сторону, вызывая синхронный поворот задних колес.: Для обеспечения синхронного поворота передних и задних колес машины с заданным запаздыванием начала поворота задних колес применительно к универсальнопропашному трактору в электрической схеме рулевого привода имеется устройство 10 запаздывания, установленное между сумматором 9 и ytилитвлeм П.
Устройство запаздывания содержит два регулируемых сопротивления, двухпозиционный переключатель и мост сопротивлений. Регулируемые сопротивления одним контактом соединены с соответствующим выходом сумматора (сигнала левого или правого поворота), подвижными контактами с усилителем, а вторым контактом с источником питания через двухпозицонный переключатель и последовательно собранный мост, содержащий три сопротивления, причем одно из них переменное, и его подвижный контакт соединен на массу. Одновременно с началом перемещения штока гидроцилиндра 2 повороту передних колес от нейтрального положения в определенную сторону (например влево) тяга 15 включает двухпозиционный переключатель в одно из положений. Величина напряжения, подаваемого иа вход усилителя 11, зависит от величины сигнала рассогласования, вырабатываемого сумматором 9, jf величины напряжения смещения, настраиваемой регулировкой переменного сопротивления моста.
Формула изобретения
