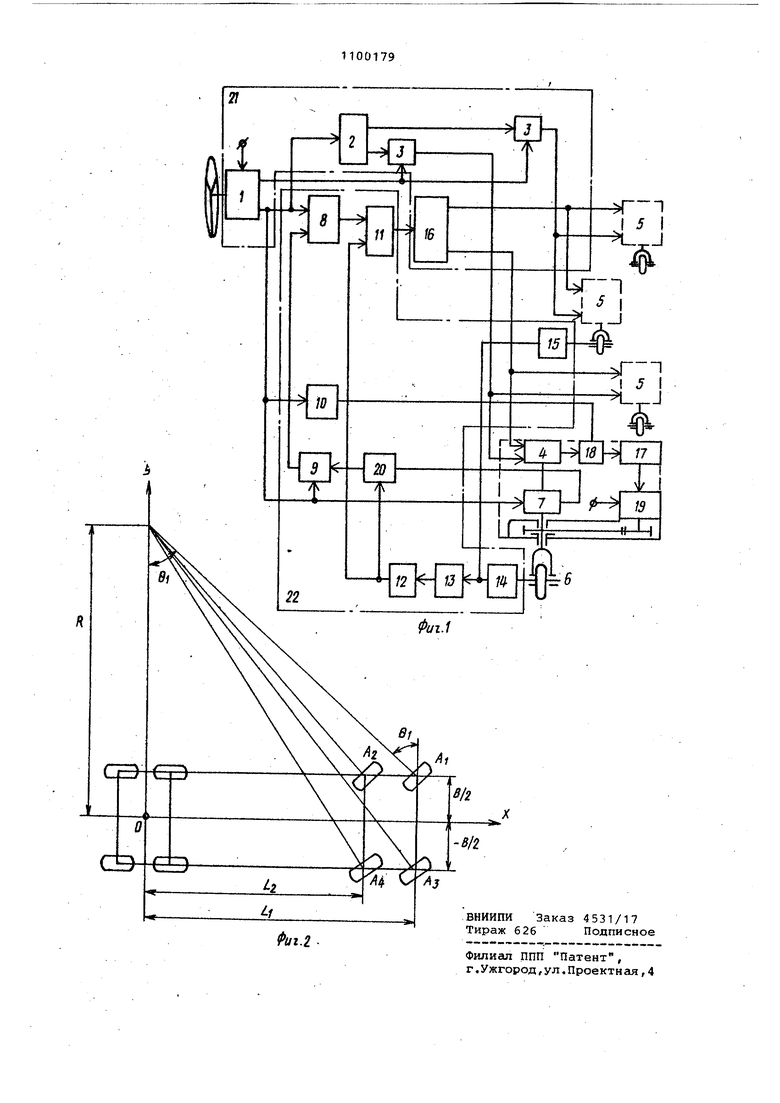
Изобретение относится к рулевым устройствам колесного шасси и может применяться в самоходных шасси различного назначения, в частности в колесных большегрузных шасси, работающих преимущественно в маневровом.режиме. Известна гидравлическая система рулевого управления транспортного средства, состоящая из задающего ус ройства, согласующего устройства, регулируквдего дросселя, насоса, бака, гидроцилиндров и датчика скорос ти, в которой осуществляется зависимость углового передаточного числа от скорости движения С 13. Недостатками гидpaвличeckoй системы являются, во-первых, изменение первоначально установленной рулевым колесом величины поворота управляемых колес при изменении скоро ти движения, во-вторых, несоверщенство работы механического датчика скорости, в-третьих, изменение углового передаточного числа происходит на всем интервале скоростей дви жения как при переднем, так и при заднем ходах. Известно также рулевое управлени с изменяемым передаточным числом, содержащее связанный с рулевым колесом блок формирования сигналов углов поворота управляемых колес с задатчиком и приводы поворота упра ляемых колес, включающие датчики обратной связи и исполнительные мех низмы, выходные валы которых связаны с осями поворота колес и датчика ми обратной связи {.21, Недостатком известного устройств является отсутствие осуществления и менения углового передаточного числа в зависимости от скорости движен транспортного средства, что ограничивает маневренность и снижает эффе тивность управления колесным транспортным средством на малых скоростя движения. Цель изобретения - повышение маневренности и эффективности управления колесным транспортным средством на малых скоростях движения. Поставленная цель достигается тем, что в рулевом управлении с изменяемым передаточным числом, содер жащем связанный с рулевым колесом блок формирования сигналов углов поворота управляемых колес с задатчиком и приводы поворота управляемых колес, включающие датчики обрат ной связи и исполнительные механизмы, выходные валы которых связаны с осями поворота колес и датчиками обратной связи, блок формирования сигналов углов поворота управляемых колес содержит преобразователи сигналов, пропорциональных продольным поперечным координатам осей поворота управляемых колес, и сумматоры, число которых в два раза меньше числа управляемых колес, привод поворота одного из управляемых колес дополнительно содержит датчик скорости, связанный с осью поворота зтого колеса, и ключ, соединенный одним из входов с датчиком обратной связи, а выходом - с исполнительным механизмом, при этом рулевое у-правление снабжено блоком изменения углового передаточного числа от скорости движения, состоящим из делителя напряжения, умножителя, узла сравнения, порогового элемента, двустороннего ограничителя величины большего сигнала скорости, узла выбора большей величины сигнала скорости, двух датчиков скорости и сумматора сигнала прямой пропорциональности и сигнала рассогласования, выход которого соединен с первым входом делителя напряжения, выход умножителя соединен с первым входом узла сравнения, выход которого соединен с первым входом сумматора сигнала прямой пропорциональности и сигнала рассогласования, второй вход которого соединен с выходом задатчика, вторые входы делителя и умножителя соеди- . нены через двусторонний ограничитель величины большего сигнала скорости, узел выбора большей величины сигнала скорости - с датчиками скорости, вход преобразователя сигналов, пропорциональных продольным координатам управляемых колес, соединен с выходом делителя, выход датчика скорости соединен с первым входом умножителя, а выход порогового элемента с ключом. На фиг. 1 изображена структурная схема рулевого устройства; на фиг.2 схема шасси. Управляемое колесо движущегося транспортного средства поворачивается вокруг оси поворота А на угол . V - параметр, зависящий от скорости движения; U (в/2 - координаты оси поворотаколеса в прямоугольных координатах ХОУ; R - радиус поворота При изменении величины R з диапазоне о.-V о дробь -f/v L,/(R-e/2; изменяется в диапазоне04(-ti,/v 8/2. Такого же изменения Дроби можно достичь, одновременно изменяя L и В/г от нуля до конечной величины, а Rот конечной величины до нуля. Меняя параметр v , можно получить для одних и тех же значений L. , 8/2 и R различные величины угла .в, , т.е. осуществить зависимость углового
передаточного числа рулевого управления от скорости движения, но при этом изменение величины угла е не происходит, если v меняется при фиксированных L , в/2 и R .
Этот принцип заложен в рулевое управление.
Рулевое колесо валом связано, с задатчиком 1 двух сигналов, которые при повороте рулевого колеса изменяются в прямой и обратной пропорциональности: первый - от нуля до максимума, а второй - от максимума до нуля.
Первый сигнал задатчика 1 подается на преобразователь 2, который преобразует сигнал прямой пропорциональности в сигналы, пропорциональные поперечным координатам в/2 и -в/2 . Второй сигнал задатчика 1 обратной пропорциональности подается на первые входы сумматоров 3, количество которых в два раза меньше количества управляемых колес. Выходы преобразователя 2 подсоединяются к вторым входам сумматоров 3. Выходы сумматоров 3 подсоединены к второму входу датчика 4 обратной связи каждого«привода 5 поворота управляемого колеса 6..
Кроме преобразователя 2, первый сигнал задатчика 1 подается одновременно на вход датчика 7 скорости, на первый вход сумматора 8 сигнала прямой пропорциональности и сигнала рассогласования, на второй вход органа 9 сравнения и на вход порогового элемента 10. На второй вход сумматора 8 поступает с органа 9 сравнения сигнал рассогласования, являющийся разностью значений задающего сигнала прямой пропорциональности и сигнала, пропорционального углу поворота управляемого колеса и данной скорости движения. Выход сумматора 8 сигнала прямой пропорциональности и сигнала рассогласования является первым входом делителя 11. На второй вход делителя 11 через двусторонний ограничитель 12 величины большего сигнала скорости и узел 13 выбора большей величины сигнала скорости поступает сигнал скорости с датчика 14 или 15 скорости. Сигнал с делителя 11 подается на преобразователь 16, который преобразует его в сигналы, пропорциональные частному значений продольных координат и скорости, т.е.Ц/v и Uj/V, которые подаются попарно на первые входы датчиков 4 обратной связи. Ротор датчика обратной связи соединен с осью поворота управляемого колеса Выход датчика 4 обратной связи соединен с входом усилителя 17 мощности на трех управляемых колесах непосредственно, а на оставшемся управляемом колесе - через ключ 18, работой кото
рого управляет пороговый элемент 10. С осью поворота этого же управляемого колеса связан ротор датчика 7 скорости, преобразующего углы поворота управляемого колеса, в частное 5 значений сигнала прямой пропорциональности и сигнала, пропорционального скорости. Усилитель 17 мощности управляет исполнительным приводом 19, состоящим из мотора и редукто0 ра, выходной вал которого соединен с осью поворота колеса.
Выход датчика 7 скорости соединен с входом умножителя 20, на второй вход которого поступает такой же
5 сигнал, как на второй вход делителя 11,.т.е. сигнал скорости. Выход умножителя 20 подключен к первому входу органа 9 сравнения. Задатчик 1, преобразователи 2 и. 16 и сумматоVры 3 образуют блок 21 формирования сигналов углов поворота управляемых колес, датчик 4 обратной связи, усилитель 17 мощности и исполнительный привод 19 образуют приводы5
5 поворота трех управляемых колес, а с ключом 18 и датчиком 7 скорости привод 5 поворота оставшегося управляемого колеса, делитель 11, умножитель 20, орган 9 сравнения, сумматор 8 сигнала прямой пропорциональ- ности и сигнала рассогласования, пороговый элемент 10, двусторонний ограничитель 12 величины большего сигнала скорости, узел 13 выб.ора большей величины сигнала скорости и дат5 чики 14 и 15 скорости образуют блок 22 изменения углового передаточного числа в зависимости от скорости движения.
Представленная схема может быть
0 выполнена на переменном или постоянном токе.
в случае переменного тока в качестве задатчика двух сигналов и датг чиков обратной связи используют.ся синусно-косинусные вращающиеся транс-форматоры. Для датчика обратной связи входами являются обмотки возбуждения и квадратурная, а выходом косинусная обмотка. В качестве преобразователей используются трансформаторы напряжения, у которых число витков вторичных обмоток соответственно пропорционально величинам координат t,., , LJ , В/2,- 6/2 . Функции датчика скорости выполняет трансформатор напряжения с переменным коэффициентом трансформации, подчиняющегося в зависимости от величины поворота ротора гиперболическому
закону от скорости, т.е. f/v при повороте как в одну, так и в другую сторону от положения равновесия, в качестве датчиков скорости используются асинхронные тахогенераторы переменного тока. В случае постоянного тока в качестве задатчика двух сигналов используется сдвоенный потенциометр. Функции преобразователей выполняют делители напряжения, при этом напря жения должны быть пропорциональны величинам координат L, , Ц , 8/г -в В качестве датчиков обратной связи используется сдвоенный синусно-косинусный потенциометр, при этом выходом являются последовательно соединенные обмотки синусная бдного и косинусная другого потенциометров В качестве датчика скорости используется потенциометр, выходное напря жение которого зависит от поворота ротора по закону l/v при повороте как в одну, так и в другую сторону, в качестве датчиков скорости исполь зуются тахогенераторы постоянного тока. Для двух вариантов выполнения схемы в качестве делителя и умножителя используются диодные функцио нальные преобразователи, выполняющие математические операции деления и умножения, в качестве двусторонне го ограничителя величины большего сигнала скорости - диодный двусторонний ограничитель, в качестве органа сравнения - соответствующее диодное вычитающее устройство, в ка честве органа выбора большей величины сигнала скорости - диодный ограничитель по минимуму, на вход ко.торого поступает сигнал с одного датчика скорости, а сигнал другог датчика скорости является напряжением смещения этого диодного ограни чителя. Рассмотрим работу схемы рулевого управления для двух случаев: поворот колесного -транспортного средств на постоянной скорости движения и изменение скорости движения при фик сированном повороте рулевого колеса Функционирование рулевого устройств в общем случае сводится к комбинаци этих двух ситуаций. Датчики скорости располагаются на двух крайних противоположных управляемых колесах, датчик 7 скорости и ключ располагаются на одном из этих двух колес. При повороте рулевого колеса от нуля до максимума, движущегося с постоянной скоростью V колесного транспортного средства, на выходах задатчика 1 сигналы плавно изменяются в диапазоне. При этом на выходах преобразова телей 2 и 16 сигналы пропбрционзльны величинам о-б,/-;-и «.в,/2 . На выходе сумматоров 3 и на втором ходе датчиков 4 обратной связи (mc„-oв./г)-(,/г) . На первом входе датчиков обратной связи Пороговый элемент 10 реагирует на изменение сигнала прямой пропорциональности и сигналом 1 открывает ключ 18.-На выходе датчика обратной связи при обработке следящим приводом нулевого сигнала имеем («,«x-06j2)-.«ei()0- .(./2)-со59,.(.)0 . При этом углы поворота колес . (t-ci m«x-0e, выходе датчика 7 скорости имеем сигнал, меняющийся в диапазоне ± то.х V v После умножителя 20, умножающего сигнал на v , имеем сигнал, изменяющийся в пределах о-..и,, , и поэтому на выходе узла 9 сравнения сигнал отсутствует, следовательно, при нулевом положении рулевого колеса управляемые колеса параллельны оси ОХ, а при крайнем положении рулевого колеса оси вращения управляемых колес пересекаются в точке О, и в зависимости от скорости v . движения имеем различные угловые передаточные чистка для рулевого управления. Величина напряжения скорости может меняться в диапазоне который задан нижним и верхним пределом двустороннего ограничителя величины напряжения большего Сигнала скорости. Пусть при фиксированном повороте рулевого колеса происходит изменение скорости движения от v, до Vj , . тогда на выходах задатчика 1 имеем . Um«x-U . При этом аналогично для скорости v угол поворота управляемых колес Гuuj1 0,-rarcto-l - l(m,x-Ul-06jf2J Скорость v, сменяется на скорос V2 , но угол поворота управляемых колес не меняется, поскольку ключ 18 закрыт нулевым сигналом с порогового элемента 10, поэтому. Spctrci .x-ll-yBi/i) и в любой момент открывания ключа произойдет резкое самопроизвольное измене ие угла управляемых колес. Чтобы того не случилось, происходи автоматическое восстановление знак равенства следующим образом: с выхо да датчика 7 скорости сигнал t.i/v , соответствующий углу поворота данно го управляемого колеса, поступает на умножитель 20, умножающий его на v , после чего на первом входе органа 9 сравнения имеем . На выходе органа сравнения и ни входе сумматора 8 сигнала прямой пропорци нальности и сигнала рассогласования имеем сигнал U(v2/Vi--r). С выхода сум /V. v 2 делиматора сигнал телем 11 превращается в сигнал и, аналогично первому случаю, угол поворота управляемых колес f U..L. . . т.е. при изменении скорости движени имея зафиксированный угол поворота рулевого колеса, задханный сигнал прямой пропорциональности изменяется таким образом, что неличина вышеприведенной дроби не меняется. Следовательно, нарушение соотретствия угла поворота управляемых колес установленному положению рулевого колеса при изменении скорости не происходит. При повороте руля в другую сторону все происходит аналогичным образом, только сигнал скорости в данном случае будет сниматься с другого датчика скорости. Это следует из того, что узел 13 выбора пропускает, сигнал, соответствующий большей из линейных скоростей, которыми обладают два передних управляемых колеса. Таким образом, на малых скоростях движения, которыми характеризуется маневровый режим работы колесного транспортного,средства, имеем уменьшение углового передаточного числа или уменьшение отношения величины поворота рулевого колеса к углу по-, ворота управляемых колес. Сравнивая предлагаемое устройство с рулевыми управлениями автомобилей - самосвалов большой и особо большой грузоподъемности, можно, отметить, что известные рулевые управления не обеспечивают изменения углового передаточного числа от скорости движения. Использование предлагаемого рулевого управления позволит сократить время работы водителя с рулевым колесом при выполнении маневра на погрузочно-разгрузочных операциях, что при перевозках на небольшие расстояния повышает производительность подвижного состава.

РУЛЕВОЕ УПРАВЛЕНИЕ С ИЗМЕНЯЕМЫМ ПЕРЕЛАТОЧНЫМ ЧИСЛОМ, содержащее связанный с рулевым колесом блок формирования сигналов углов поворота,управляемых колес с задатчиком и приводы поворота управляемых колес, включающие датчики обратной связи и исполнительные механизмы, выходные валы которых связаны с осями поворота колес и датчиками обратной связи, отличающееся тем, что, с- целью повышения маневренности и. эффективности управления колесным транспортным средством на малых скоростях движения, блок формирования сигналов углов поворота управляемых колес содержит преобразователи сигналов, пропорциональных продольным и поперечным координатам осей поворота управляемых колес, и сумматоры, Ч1.СЛО которых в два раза меньше числа управляемых колес, привод поворота одного из управляемых колес дополнительно содержит датчик скорости, связанный с осью поворота этого колеса, и ключ, соединенный одним из входов с датчиком обратной связи, а выходом - с исполнительным механизмом, при этом рулевое управление снабжено блоком изменения углового передаточного числа от скорости движения, состоящим из делителя напряжения, умножителя, узла сравнения, порогового элемента, двустороннего ограничителя величины большего сигнала скорости, узла выбора большей величины сигнала скорости, двух датчиков скорости и сумматора сигнала прямой пропорциональности и сигнала рассогласования, выход которого соединен с первь1м входом делителя напряжения, выход умножители соединен с первым (Л входом узла сравнения, выход которого соединен с первым входом сумматора сигнала Прямой пропорциональности и сигнала рассогласования, второй вход которого соединен с выходом задатчика, вторые входы делителя И умножителя соединены через двусторонний ограничитель величины большего сигнала скорости, узел выбора большей величины сигнала скорости с датчиками скорости, вход преобразователя сигналов, пропорциональных продольным координатам управляемых колес, соединен с выходом делителя, .выход датчика скорости соединен с :О первым входом умножителя, а выход порогового элемента - с ключом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлическая система рулевого управления транспортного средства | 1978 |
|
SU709448A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство рулевого управления колесного транспортного средства | 1978 |
|
SU742232A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
