Известны приборы для автоматического построения траекторий движения заряженных частиц в электрических полях, содержащие моделирующую электрическое поле электролитическую .ванну, в которой помещен измерительный зонд, связанный с трехколесной кареткой, несущей пищущее приспособление и рещающий функциональный элемент, отрабатывающий угол поворота рулевого колеса каретки. Известные приборы для автоматического построения траекторий движения заряженных частиц в электрических полях имеют тот недостаток, что они не дают возможности строить траектории с любым радиусом кривизны.
Предлагаемый прибор не имеет этого недостатка и позволяет строить траектории движения с любым радиусом кривизны, что достигается выполнением рещающего функционального элемента прибора в виде системы синусно-косинусных потенциометров.
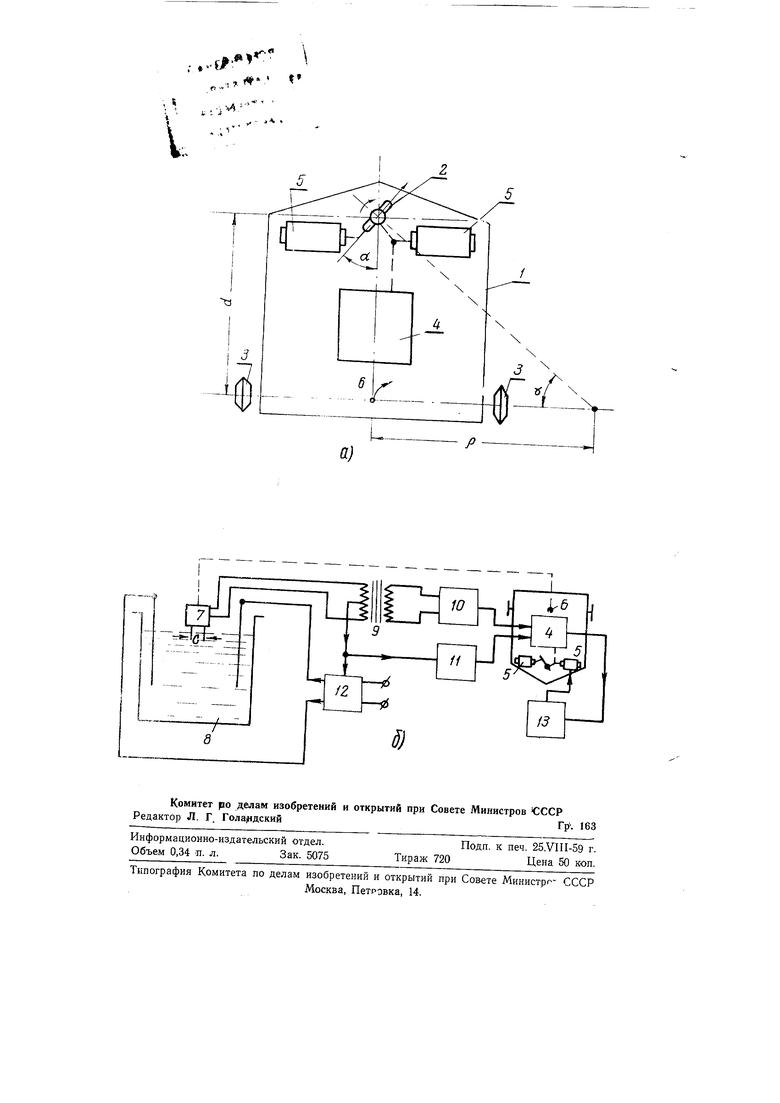
На чертеже показана принципиальная схема предлагаемого прибора (а) и его электрическая блок-схема (б).
Прибор представляет собою математическое вычислительное устройство, непрерывно вычисляющее радиус р траектории частицы по формуле:
р р .
где; и - потенциал в данной точке электрического поля, „ - нормальная компонента напряженности электрического поля.
Одновременно непрерывным вычислением радиуса кривизны траекторий в каждой данной его точке, прибор автоматически непрерывно
№113407- 2 -
вычерчивает траекторию заряженной частицы в электрическом поле, U и Е„ которого измеряются двойным зондом в электрической ванне.
Прибор имеет трехколесную каретку /, трапы и переднее колесо 2 которой служит одновременно рулевым и ведущим, а два других колеса 3 являются базовыми.
На каретке помещены: функциональный элемент 4 (синусно-косинусные потенциометры), связанный с осью поворота рулевого колеса, и два электродвигателя 5, из которых одиц отрабатывает угол поворота рулевого колеса, а второй сообщает каретке поступательное движение. В точке пересечергия продольиой оси каретки / с осью базовых колес 3 расположеи отметчик 6, вычерчивающий траекторию частицы на бумаге, по которой перемещается каретка /.
Измеренное двойным зондом 7 в электролитической ванне 8 напряжение и (где С-расстояние между штырьками зонда) подводится к входному трансформатору 9 электронного блока и усиливается электронными усилителями 10 -я 11 с. глубокой отрицательной обратной связью, обеспечивающей высокую стабильность коэффициента усиления (до 0,5%). Для получения минимальной погрещности входные сигналы усилителей автоматически поддерживаются в определенных пределах, обеспечивающих работу усилителей в оптимальных режимах. Регзлирование входных сигналов осуществляется при номощи следящей системы, воздействующей на автотрансформатор 12, питающий электролитическую ванну 8. С выходов усилителей напряжения нодводятся к расположенным на каретке синусно-косинусным потенциометрам. При удовлетворении уравнения:
и sina.-d Е„ cosy. 0,
где а - угол поворота рулевого колеса 2, а d - расстояние между осью задних (базо;вых) колес и осью поворота рулевого колеса, каретка вычерчивает с радиусом кривизны, определяемым уравнением:
s
F
т. е. искомую траекторию.
При нарущении указанного равенства на выходе синусно-косинусных потенциометров появляется напрял ение рассогласования; которое усиливается электронным нуль-усилителем 13 и приводит В движение один из электродвигателей 5, поворачивающий рулевое колесо и жестко связанный с его осью движок синусно-косинусной нотенциометрической системы, до тех пор, пока не будет удовлетворено уравнение
и silly.-d Е со5У. 0.
Таким образом, следящая система непрерывно определяет величину угла поворота рулевого колеса, направляя каретку по кривой, совпадающей с траекторией заряженной частицы в поле, смоделированном в электролитической ванне.
Система синусно-косинзсных потенциометров позволяет вычерчивать кривые обоих знаков кривизны с величиной радиуса в пределах )оо, т. е. любые плоские траектории, получающиеся в произвольных плоских и аксиально-симметричных полях, при этом в последнем случае вычерчиваются траектории, лежащие в меридиональной плоскости.
Предмет изобретения
Прибор для автоматического построения траекторий движения заряженных частиц в электрических полях, содержащий моделирующую электрическое поле электролитическую ванну, в которой помещен измерительный зонд, связанный с трехколесной кареткой, несущей пищущее приспособление и рещающий функциональный элемент, отрабатывающий угол поворота рулевого колеса каретки, отличающийся тем, что для возможности построения траекторий с любым радиусом кривизны рещающий функциональный элемент прибора выпо.пнен в виде системы синусно-косинусных потенциометров.
- 3-A-g 113407
:.
.,,
...
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для автоматического построения траекторий движения заряженных частиц в электрических и магнитных полях | 1956 |
|
SU116444A1 |
| Прибор для построения траекторий движения заряженных частиц в электрических и магнитных полях | 1956 |
|
SU113401A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ ТРАЕКТОРИЙ | 1973 |
|
SU397929A1 |
| Траектотраф для вычерчивания траектории заряженных частиц | 1961 |
|
SU145765A1 |
| ГЕНЕРАТОР ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ С ПЕРЕСТРАИВАЕМОЙ ЧАСТОТОЙ СТИМУЛИРОВАННОГО ИЗЛУЧЕНИЯ | 2003 |
|
RU2252478C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СВОБОДНО ВЗЛЕТАЮЩЕГО ПАРУСА ТИПА КАЙТА НА ВОДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ С ВЕТРОВЫМ ПРИВОДОМ | 2005 |
|
RU2359864C2 |
| УСТРОЙСТВА С ПОКРЫТИЕМ ДЛЯ ЭКСПЛУАТАЦИИ НЕФТЯНОЙ И ГАЗОВОЙ СКВАЖИНЫ | 2009 |
|
RU2529600C2 |
| КАТЕТЕР, СОДЕРЖАЩИЙ ЕМКОСТНЫЕ МИКРОМАШИННЫЕ УЛЬТРАЗВУКОВЫЕ ПРЕОБРАЗОВАТЕЛИ, С РЕГУЛИРУЕМЫМ ФОКУСОМ | 2011 |
|
RU2594429C2 |
| СИСТЕМЫ И СПОСОБЫ МНОГОСТОРОННЕГО АНАЛИЗА | 2012 |
|
RU2627927C2 |