Известны приборы для автоматического построения траекторий движения заряженных частиц в электрических и магнитных полях. Эти приборы содержат моделирующую поле электролитическую ванну, в которой помеп4.ен измеряющий компоненты напряженности поля зонд, связанный коорд п-1атором с трехколесной тележкой, несущей пишущее приспособление и синусно-косинусный решающий элемент, отрабатывающий угол поворота рулевого колеса тележки.
Предлагаемый прибор для автоматиче|:кого построения траекторий движения заряженных частиц в электрических и магнитных полях относится к числу известных приборов для этой цели, но имеет ту особенность, что в нем применены интеграторы, непрерывно вычисляющие кинетическую энергию частицы и время ее движения для непрерывного определения радиуса кривизны траектории.
Такая конструкция прибора позволяет строить траектории движения частиц движущихся как с нерелятивистской, так и релятивистской скоростью.
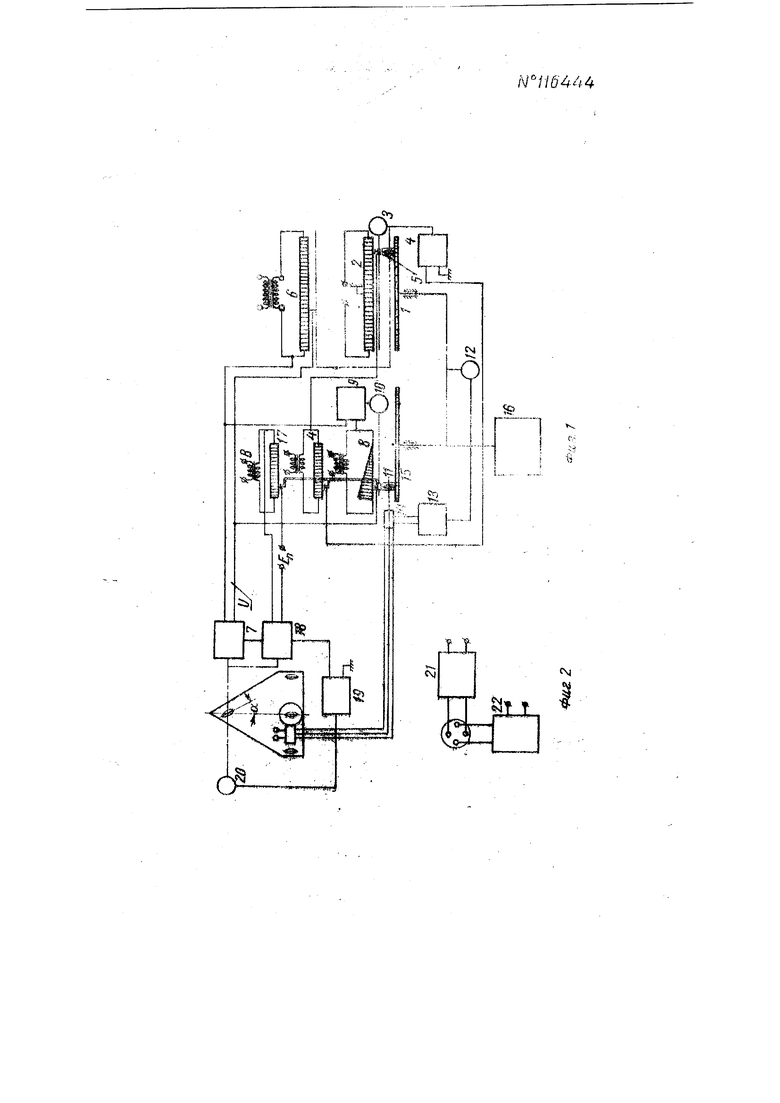
Представленная на фиг. 1 схема поясняет сущность прибора. На иптсграторс / нрсизводится подсчет энергии частицы в пияч
Подинтегральная величина E-.v образовывается иа потенциометре 2 и с помощью следящей системы 3-4 отрабатывается в механическое перемещение ролика интегратора 5.
Величина U снимается в виде напряжения с линейного потенциометра б и подается с одной стороны на тригонометрический рещатель каретки /
/,
(сипус.чый вход), а с другой стороны на конический реохорд 8, где .с помощью следящей системы 9-10 решается уравнение
V const У и
Велпчипа v отрабатывается в виде MexainiqecKoro перемещения ро..тика интегратора //. Следящая система 12-13, в которую входят два ;чЛ1(.-1П1а 14, потает ypaiiaeiine
/ . i .
Величина / нолучается в внде углового поворота вала введения независимой нсременной интегратора 15 и подается как независимая переменная интегрирования также на интегратор 1 и на блок 16 питания ванны для приведения датчиков электрического ноля, питающих ванну. На потенциометре 17, питаемом напряжением, нропорцио«альным В, снимается напряжение, пропорциональное UB, которое складывается с напряжением, пропорциональным Е„ , и подается на тригонометрический решатель 18 каретки (косинусный вход) и следящую систему 19-20.
Схема зонда приведена на фиг- 2, где 21-22 соответственно нормальная и касательная к траектории компоненты нанряженнасти электрического поля.
Данная схема при применении релятивистской приставки может быть использована и для рещения задач движения заряженных частиц в релятивистском случае.
Варианты схемы, предусматривающие применение интеграторов, иепрерывно вычисляющих кинематическую энергию частицы и время ее движения для непрерывного определения радиуса кривизны траектории, дают возможность построения траектории движения заряженных частиц в переменных электрических и магнитных полях с нерелятивистской и релятивистской скоростями.
П р е д м е т изобретен И я
Прибор для автоматического построения траекторий движения заряженных частиц в электрических и магнитных полях, содержащий моделирующую электрическое поле электролитическую ванну, в которой помещен измеряющий компоненты напряженности электрического ноля зонд, связанный координатором с трехколесной кареткой, несущей пищущее приспособление я синусно-косинусный рещающий элемент, отрабатывающий угол поворота рулевого колеса каретки, отличающийся тем, что, с целью построения траекторий движения заряженных части1х в переменных электрических и магнитных полях с нерелятивистской и релягивистской скоростью, в нем применены интеграторы, например, механиче,ского типа, непрерывно вычисляющие кинетическую энергию частицы и время ее движения для непрерывного определения радиуса кривизны траектории. у
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для построения траекторий движения заряженных частиц в электрических и магнитных полях | 1956 |
|
SU113401A1 |
| Прибор для автоматического построения траекторий движения заряженных частиц в электрических полях | 1956 |
|
SU113407A1 |
| Интегрирующее устройство | 1961 |
|
SU147332A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ ТРАЕКТОРИЙ | 1973 |
|
SU397929A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УСКОРЕННЫХ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2000 |
|
RU2187911C1 |
| Стенд для имитирования управляемости продольного и бокового движения самолета | 1960 |
|
SU133355A1 |
| ПЛАНИМЕТР | 1973 |
|
SU378715A1 |
| СПОСОБ И УСТРОЙСТВО ПОЛУЧЕНИЯ УСКОРЕННЫХ ЗАРЯЖЕННЫХ ЧАСТИЦ | 1999 |
|
RU2152142C1 |
| Рулевое управление транспортного сред-CTBA CO ВСЕМи упРАВляЕМыМи КОлЕСАМи | 1979 |
|
SU823206A1 |
| СПОСОБ ИЗМЕНЕНИЯ ВЕЛИЧИНЫ СКОРОСТИ ЗАРЯЖЕННЫХ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044421C1 |
Комитет по делам изобретений и открытий при Совете Мипистров СССР Редактор Н. С. Кут;финаГр. 163, 174
Информационно-издательский отде.:. Иодп. к неч. 15.1-59 г. Объем 0,17 п. л.Зак. 4437Тираж 2025Цена 25 кон.
Типография Комитета по делам изобретений и открытий при Совете Министров СССР
Москва, Петровкп, И.
