Изобретение относится к позиционирующему устройству для свободно взлетающего паруса типа кайта на водном транспортном средстве с ветровым приводом.
Подобное позиционирующее устройство известно из US PS 2433344. При этом речь идет, правда, не о лебедке, которая предназначена для управления парусом на водном транспортном средстве с ветровым приводом в соответствии с ветровыми условиями, а только о том, чтобы удерживать на постоянной высоте вообще летательный объект. Управление в соответствии с ветровыми условиями в известном устройстве невозможно.
В основе изобретения лежит задача создания позиционирующего устройства описанного выше рода, которое не имело бы названного недостатка и позволяло бы автоматически согласовывать положение паруса в соответствии с ветровыми условиями.
Эта задача решается посредством мер, приведенных в отличительной части п.1 формулы. Изобретение основано, при этом, на том факте, что позиционирующее устройство для свободно взлетающего паруса с профилем несущего крыла в качестве исключительного, вспомогательного или аварийного привода, который соединен тянущим канатом с водным транспортным средством, в частности, идущим по морю судном, достигается благоприятным образом тогда, когда длина тянущего каната согласована с состояниями атмосферы. Если должны происходить автоматические выбирание и стравливание, то предельное усилие для стравливания устанавливают выше предельного усилия для выбирания, так что возникает стабильная эксплуатация без колебаний регулирования.
В решении согласно изобретению особенно предпочтительно, что одновременно предотвращается перегрузка тянущего каната, поскольку предел нагрузки, при котором происходит стравливание, выбирают предпочтительно так, чтобы он лежал в пределах нагрузочного допуска тянущего каната.
Далее, благоприятно, если предусмотрены дополнительные средства, которые инициируют выбирание и стравливание только тогда, когда выбирание на длину меньше заданной, а стравливание на длину больше заданной или срыв потока продолжаются в течение заданного периода времени, который, при необходимости, может быть установлен для каждого функционального направления по-разному, поскольку таким образом предотвращаются слишком частые выбирание и стравливание. Периоды времени лежат при этом предпочтительно в диапазоне нескольких секунд.
В другом предпочтительном варианте выполнения изобретения выходной сигнал датчика для предстоящего отрыва потока подают к преобразователю, который управляет находящейся на борту водного транспортного средства лебедкой для укорочения тянущего каната с возможностью возрастания набегающего на парус потока таким образом, что подъемной силы паруса достаточно для его удержания, по меньшей мере, в воздухе. При этом скорость ветра при выбирании может быть установлена на постоянное минимальное значение, гарантирующее скорость набегающего потока, которого достаточно для устойчивого полета паруса. В качестве альтернативы можно установить минимальное натяжение тянущего каната. Если величина натяжения ниже минимального, то лебедка подтягивает канат, гарантируя этим набегающий на парус поток. При превышении вследствие этого определенного натяжения лебедка снова останавливается, и режим полета нормализуется. Таким образом, достигается простое управление лебедкой, зависимой от пороговых значений тянущего усилия.
В другом благоприятном выполнении позиционирующего устройства, согласно изобретению, если набегающий поток или тянущее усилие снова превышает другое заданное пороговое значение, лежащее ниже того значения, при котором в любом случае приходится стравливать тянущий канат, его длину снова последовательно увеличивают, пока он не достигнет, по существу, своей длины перед укорочением.
Далее, предпочтительным образом может быть предусмотрено, что лебедка имеет заданную характеристику крутящий момент-длина каната вокруг установленной длины каната, обеспечивающую демпфирование толчков каната. Эта мера отличается тем, что могут быть снижены динамические нагрузки на парус и тянущий канат. Это может происходить тогда, когда характеристика крутящий момент-длина каната имеет прогрессивный момент, т.е. чем больше стравливается канат, тем выше сопротивление лебедки. С такой характеристикой действующий на парус порыв ветра вызывает сначала быстрое выбирание слишком большой длины каната, а затем, однако, плавное демпфирование системы.
Чтобы обеспечить надежную уборку паруса, далее благоприятно, если скорость ветра при уборке обеспечивает минимальную скорость набегающего на парус потока для поддержания его летательной способности под нагрузкой за счет тянущего каната.
Далее, предусмотрены средства, которые по особым критериям вызывают автоматическое подтягивание паруса, если скорость ветра ниже, чем это требуется для поддержания его летательной способности под нагрузкой за счет тянущего каната, или если на основе навигационных данных следует опасаться столкновения с предметом под водой, в воде, на суше или в воздухе в течение отрезка времени, которое меньше или равно времени, по меньшей мере, необходимому для подтягивания паруса при максимальной скорости лебедки. То же самое относится к случаю, когда навигационные ограничения грозят помешать управлению парусом.
Чтобы использовать скорости ветра на больших высотах, благоприятно, если инициируют выбирание каната на заданное дополнительное значение длины, если в течение заданного интервала времени скорость набегающего потока не будет ниже минимальной, или будет принят или получен метеосигнал, указывающий повышенную скорость ветра или благоприятствующее движению по курсу направление ветра, и поддерживают эту длину, если при стравленной дополнительной длине каната его натяжение не уменьшается. Таким образом, канат стравливают, если господствуют постоянные условия, чтобы попытаться управлять парусом на большей высоте.
В другом благоприятном усовершенствовании изобретения выбирание и стравливание, в частности, при более сильном волнении на море, осуществляют с возможностью уменьшения нежелательных движений судна (бортовая качка, килевая качка, рыскание). Выбирание и стравливание происходят, следовательно, с фазовым сдвигом относительно составляющей движений судна в направлении каната, так что в этом отношении, с одной стороны, уменьшаются движения судна, а с другой стороны, обеспечено стабильное управление парусом, поскольку действующие на тянущий трос усилия уменьшаются.
Видно, что в противоположность уровню техники принято множество мер, обеспечивающих полностью автоматическое управление парусом в качестве движителя, которым требуется управлять на разных высотах.
Для удовлетворения высоким требованиям, предъявляемым к лебедке, согласно изобретению, в частности, в отношении энергопотребления, усилия и реакционной способности, далее благоприятно, если лебедку приводят в движение средой под давлением, причем привод лебедки выполнен, в частности, в виде гидронасоса регулируемого объема. Это позволяет выполнить также требования к безопасности, которые, например, на танкерах, ограничивают использование электроприводов из-за существующей опасности пожара.
Чтобы обеспечить надежную уборку также в аварийной ситуации, для работы лебедки предусмотрен аварийный агрегат, который вырабатывает необходимую для работы лебедки энергию даже при выходе из строя первичного источника энергии.
Особенно предпочтительным у изобретения является то обстоятельство, что усилия для изменения паруса требуется передавать лишь короткими путями, так что возможны точные настройки, тем более, что при приведении в действие посредством длинных тянущих линей точная передача управляющих команд невозможна уже из-за их растяжений.
Далее, парус не подвержен опасностям из-за того, что лини переплетаются между собой, и он становится неманевренным. Следует подчеркнуть, что правильные настройка паруса и управление им имеют для водного транспортного средства, в целом, большое значение, поскольку, например, маневр по изменению направления движения всегда должен включать в себя новую настройку паруса. Если бы здесь лини, например, скрестились или запутались, то либо не удалось бы изменить направление, либо парус пришлось бы сложить.
Далее, предпочтительно, что в том случае, если исполнительные элементы или средства для создания усилия предусмотрены в непосредственной близости от паруса, соответствующие регулировочные устройства могут быть предусмотрены, по меньшей мере, частично тоже там, непосредственно у паруса, так что можно в значительной степени отказаться от сложных и чувствительных к помехам путей передачи сигналов.
При изменении аэродинамического влияния паруса задействованы все аэродинамические управления, такие как клапаны, рули, а также изменение его ориентации, установки и/или формы.
Изменение формы может происходить, при этом, предпочтительно за счет симметричного или асимметричного изменения профиля несущего крыла посредством оказания влияния на ориентацию его кромки отрыва потока, за счет крутки профиля несущего крыла, за счет симметричного и/или асимметричного изменения кривизны профиля несущего крыла и/или за счет изменения точки приложения усилия тянущего каната. В других предпочтительных усовершенствованиях изменение аэродинамических свойств может осуществляться также за счет изменения геометрии профиля несущего крыла, как это проявляется в сечении кайта или в его кривизне. Подобное изменение формы состоит у двухслойного профиля несущего крыла, предпочтительным образом, в изменении расстояния между обоими слоями посредством соответствующих элементов.
Для уменьшения веса может быть благоприятным, чтобы двухстороннее и/или встречное приведение в действие для однонаправленного или асимметричного изменения профиля несущего крыла происходило посредством единственного приводного элемента. В этом случае, например, приводят в действие навстречу друг другу два поперечных руля, причем нейтральное положение образует среднее положение обоих рулей.
У состоящего из текстильного материала паруса, когда он представляет собой, например, кайт типа параплана, изменение аэродинамического действия может происходить предпочтительно за счет регулирования или удлинения или укорочения, по меньшей мере, одного управляющего линя посредством приводного элемента.
Для согласования усилий, прикладываемых для аэродинамических регулировок, может быть благоприятным, если, по меньшей мере, один управляющий линь имеет, по меньшей мере, один поворот или возврат в виде тали, причем таль может служить как для повышения, так и для понижения передаточного отношения.
Если управляющие лини образуют матричное расположение, то это облегчает оказание влияния на кайт типа параплана. При этом такое расположение относится к зоне под кайтом, от которой аэродинамические срабатывания могут осуществляться сообща. При этом благоприятно, если различные управляющие лини приводят в действие, соответственно, одним сообща приводимым исполнительным элементом, поскольку за счет этого уменьшается число приводных элементов. Сообща приводимый исполнительный элемент может состоять при этом, например, из установленного с возможностью вращения элемента, коромысла, рычага, зубоременного шкива и т.п., сообща вращаемого приводным двигателем. Отдельные управляющие лини ведут тогда к выбранным по-разному точкам закрепления на общем исполнительном элементе, так что из геометрии места закрепления возникает соответствующий ход, с которым движут соответствующий управляющий линь. При этом отдельные управляющие лини могут иметь повышенное или пониженное передаточное отношение также за счет талей. Таким образом, движение исполнительного элемента преобразуется в желаемое изменение геометрии всего паруса или его частей.
В другом благоприятном варианте приводной элемент состоит из электролебедки и/или линейного исполнительного элемента, причем линейный исполнительный элемент образован пневмоэлементом, который под действием избыточного давления растягивается в поперечном направлении и за счет этого укорачивается по своей длине и наоборот. Подобные элементы называются «искусственный мускул» и приводятся предпочтительно пневматически.
Чтобы получить энергию для управляющих воздействий на парус, благоприятно, если в предусмотренном вблизи паруса и аэродинамически оптимально облицованном контейнере установлена ветряная турбина, воздействующая на электрический генератор, который тогда заряжает аккумулятор электрической энергии. При использовании пневмоэлементов в качестве исполнительных элементов может быть предусмотрена также турбина, которая приводит подключенный компрессор, создающий тогда избыточное давление для пневмоэлементов. В качестве аккумулятора энергии в этом случае служит аккумулятор давления.
В предусмотренном вблизи паруса контейнере размещены также средства для управления парусом, которые вырабатывают выходные сигналы для управления приводными элементами (исполнительными элементами). При этом предусмотрены, в частности, средства для определения управляющего сигнала для приводного элемента по сигналу для курса транспортного средства, направления ветра и/или скорости ветра.
Благоприятно, если для управления исходят от направления и скорости кажущегося ветра на парусе, поскольку это определяет его ориентацию.
Парусом управляют предпочтительно посредством устройства автоматического управления (автопилот), причем предусмотрен сенсорный элемент, к которому подключен, по меньшей мере, один, выполненный предпочтительно в виде измерителя ускорений преобразовательный элемент, подающий к приводному элементу, по меньшей мере, косвенно управляющий сигнал. Другой сенсорный элемент подает выходной сигнал со ссылкой на свое положение и ориентацию в пространстве, которая относится, в частности, к положению судна.
Если предусмотрен другой сенсорный элемент, который указывает предстоящий или уже произошедший срыв потока или выполнен в виде предусмотренного в зоне обтекаемой поверхности паруса элемента, подающего при прилегающем воздушном потоке выходной сигнал, управление полетом может быть рассчитано с возможностью предотвращения снижения паруса в случае местного отрыва.
Далее оказалось предпочтительным, если предусмотрены средства для вырабатывания извне посредством соединенного с водным транспортным средством бортового блока управляющего сигнала для пространственной ориентации паруса или для выполнения им маневров. Далее предпочтительно предусмотрены средства передачи сигналов, чтобы передавать третий управляющий сигнал от бортового блока к устройству автоматического управления, причем речь идет предпочтительно о дифференциальном GPS-сигнале или другом навигационном сигнале, который содержит информацию о положении паруса относительно водного транспортного средства.
Если предусмотрены дополнительные средства памяти и сравнения, которые обеспечивают запоминание соответствующих предшествующим моментам времени сигналов с возникшими позднее по времени сигналами с возможностью сравнения следующих друг за другом по времени маневренных состояний, то «предвидящее» управление парусом может быть создано за счет предвидения последствий для эксплуатации судна при совершении маневра.
В другом благоприятном варианте осуществления изобретения приводной элемент и/или сенсорный элемент предусмотрены в контейнере, который образует также точку приложения силы тянущего каната, и от которого отходят стропы и рулевые канаты, с которыми соединен парус. Этот контейнер выполнен предпочтительно аэродинамически оптимально и может содержать также ветровую турбину для вырабатывания энергии для аэродинамического управления парусом.
Описанное изобретение пригодно, в частности, для мореходных судов или судов, плавающих по большим озерам.
В одном благоприятном выполнении для получения энергии предусмотрен приводимый течением воды, в частности, через гребной винт или турбину, генератор, который подает выработанную электрическую энергию к аккумулятору энергии, в частности водородному генератору. Полученный в результате электролитического расщепления воды водород аккумулируют и хранят в резервуаре.
Другие предпочтительные примеры выполнения приведены в зависимых пунктах формулы.
На чертежах изображен и ниже описан предпочтительный пример выполнения. При этом парус согласно изобретению назван для краткости в качестве синонима «кайтом». Правильно также обозначение «крыло», поскольку речь идет о летательном аппарате с функцией несущего крыла.
Предпочтительный пример выполнения изображен на чертежах, представляющих:
- фиг.1: в перспективе судно, буксируемое системой кайтинга согласно изобретению;
- фиг.1а: систему координат, служащую в качестве системы отсчета в последующем описании;
- фиг.1b: пример выполнения паруса согласно изобретению, в виде параплана;
фиг.2: блок-схему управления парусом согласно изобретению;
фиг.3: более подробную блок-схему управления парусом согласно изобретению;
фиг.4: блок-схему позиционирующего устройства согласно изобретению.
На фиг.1 в перспективе изображено судно, буксируемое системой кайтинга согласно изобретению. При этом парус 1 посредством тянущего каната 1.1 с устройством 2 приложения силы, установленным в носовой части судна 4, соединен с последним. Тянущий канат 1.1 ведет к центральной гондоле 1.2, от которой отходят стропы 1.3, ведущие к выполненному по типу параплана с профилем кайта парусу 1 и придающие ему необходимую форму. В отношении подробностей следует сослаться на нижеследующее описание. Кажущееся направление ветра в зоне паруса 1 обозначено буквой W. Соответствующий вектор ветра охарактеризован своими величиной и направлением. При необходимости его изменение по времени характеризовано еще обозначающей порывистость величиной В, которая образует среднее по времени отклонение скорости ветра от среднего значения и может быть изображена в виде скаляра, который образует как бы радиус шара вокруг вершины вектора W ветра.
На фиг.1а изображена система координат, которую в нижеследующем описании используют в качестве системы отсчета. При этом xs обозначает направление движения судна, a ys - направление поперек направления движения. Система координат при этом предполагается жестко привязанной к точке Ps судна. Эта точка представляет собой предпочтительно точку 2 воздействия силы в носовой части. Высота hs соответствует при этом направлению оси z традиционной системы координат. Она указывает высоту над точкой Ps отсчета. Этой точкой отсчета является, предпочтительным образом, место размещения GPS-антенны находящегося на борту GPS-прибора, так что координаты точки вне Ps, в которой находится другой GPS-прибор, могут быть созданы посредством образования разности выданных обоими приборами координат. (Если GPS-антенна находящегося на борту GPS-прибора удалена от точки Ps отсчета, то это может быть учтено за счет добавления постоянной разности координат).
Для упрощения ниже следует исходить из полярной системы координат, в которой угол α образует азимутальный угол, а угол β - высотный угол. Направление вектора V указывает при этом на гондолу 1.2 паруса 1. Речь при этом идет как бы о «географической системе координат», поскольку гондола 1.2 или парус 1 движется, по существу, по поверхности шара. Азимутальный угол α и высотный угол β указывают, тем самым, как бы географические долготу и широту положения гондолы на образованном вектором V «земном шаре». Долгота вектора V грубо указывает длину тянущего каната 1.1, причем его провисание сначала следует оставить без внимания.
Гондола 1.2 паруса ориентирована по собственной системе координат с направлениями xk, yk и zk, причем zk указывает в направлении продолжения вектора V. Вращение гондолы 1.2 паруса 1 вокруг вертикальной оси zk называется углом рыскания (Yaw). Изменение угла рыскания вызывает изменение направления полета паруса 1. Угол рыскания может быть изменен, в том числе, за счет активного управления описанными ниже тормозными клапанами образующего парус 1 параплана. Он вызывает изменение направления, и этот процесс сопоставим с управлением управляемым воздушным змеем. Вращение вокруг продольной оси xk представляет движение крена (крен) и управляется неактивно. По движению крена или соответствующему отклонению направления от zk можно определить провисание тянущего каната 1.1 на основе силы тяжести, тогда как вращение вокруг поперечной оси yk образует наклон паруса вокруг поперечной оси и может быть вызвано порывами ветра и их воздействием на тянущий канат 1.1. Эта система отсчета образует основу понимания нижеследующего описания системы судно-кайт.
На фиг.1b схематично изображен пример выполнения паруса, согласно изобретению. Парус образует в изображенном варианте выполнения параплан 101 с контейнером 102 для управления, которое более подробно описано ниже. От закрепленного на тянущем канате 1.1 контейнера 102 отходят стропы 103, переходящие в ответвления 104 в виде подвесной системы, соединенные с нижней текстильной оболочкой 105. Верхняя текстильная оболочка 106 образует замыкание сверху. Обе оболочки удерживаются вместе внутренними соединительными линями (не показаны) или соответствующими соединительными элементами, например, текстильными ребрами, причем образованный обеими оболочками профиль несущего крыла стабилизирован внутренним избыточным давлением воздуха, возникающим через отверстия на передней кромке кайта (на чертеже слева), которые для наглядности также не показаны. Направление полета обозначено стрелкой 107.
На фиг.2 изображена блок-схема системы ветрового привода. Фиг.2 служит также для ориентации в нижеследующем описании отдельных составных частей системы. Использованные сотенные ссылочные позиции образуют также групповые обозначения детально изображенных ниже частей системы. (Штриховая линия 99 обрамляет при этом те узлы, которыми должно быть дополнено традиционное судно, чтобы оно было дополнительно оснащено ветровым приводом, согласно изобретению). Парусная система 100 содержит парус и относящуюся к нему систему управления. Устройство может быть расположено при этом в находящейся на конце тянущего каната гондоле, от которой отходят стропы, или же непосредственно встроено в парус. Система управления включает в себя, по существу, автопилот, который контролирует управление положением и траекторией полета паруса.
Парусная система 100 посредством тянущего каната и лебедки 210 (включая тянущий канат) и обозначенных штриховыми линиями путей связи с бортовой системой 200 соединена с поверхностью управления (интерфейс пользователя) 205, содержащей систему управления, которая контролирует положение кайта и подает машине 5 и рулю 6 судна необходимые управляющие команды. С парусом бортовая система соединена различными путями связи, которые позволяют, в принципе, задавать положение кайта с бортовой системы и принимать от парусной системы информацию, важную для бортовой системы.
Перед бортовой системой 200 включена навигационная система 300, которая передает бортовой системе соблюдаемый маршрут судна с учетом расходов, времени, скорости и использования ветра, а также, при необходимости, передает направление и силу ветра. К информации о ветре может относиться также обозначение, характеризующее его порывистость. Сюда могут относиться также информация касательно волнения на море и результирующее из этого движение судна. (Данные о ветре и метеоданные происходят при этом первоначально из описанной ниже системы 600 метеоинформации). Навигационная система поддерживается навигаторным информационным ориентиром (движение по карте) 310.
Из информации о курсе, ветре и волнах вырабатывают сигналы, которые управляют бортовой системой 200 и вызывают соответствующую настройку системы 100 кайтинга. Бортовая система 200 вырабатывает управляющие сигналы для машины 5 и руля 6.
Навигационной системой 300 управляют с помощью маршрутной системы 400, которая определяет путь судна посредством лежащей в основе его эксплуатации экономической базы. Маршрутной системой 400 управляют на основе заданных внешней станцией 500 данных, которые корректируют с данными системы 600 метеоинформации. Полученные навигационной системой 300 актуальные курсовые данные посредством соединения 301 с обратной связью (по радио, через спутник) передают обратно к внешней станции 500. Данные могут приниматься также другими, оснащенными системой согласно изобретению судами и использоваться для локальной актуализации метеосистемы. Таким образом, могут быть учтены актуальные, локально обусловленные изменения курса при дальнейшем внешнем задании маршрута.
Видно, что позиционирование системы 100 кайтинга происходит в зависимости от курсовых данных так, что на основе метеоусловий (актуально господствующие ветры и условия волнения) и с учетом экономических граничных условий, которые должны обосновать максимально рентабельную эксплуатацию судна, происходит оптимальное задание маршрута.
Аварийная система 700 в случае непредвиденной ситуации, вынуждающей сразу же совершить действия в виде аварийного маневра, подает требуемые управляющие команды.
Другие блоки 800 и 900 представляют, соответственно, систему сигнализации и систему связи, которые согласуют навигацию с другими участниками движения. К системе сигнализации относится навигационно-аварийное освещение и передача собственных навигационных данных по радио, которые информируют другие находящиеся вокруг суда о развернутой парусной системе и предполагаемом маршруте или актуальном курсе. Система связи включает в себя все системы, касающиеся дальнейшего обмена информацией.
Основные пути потока данных обозначены на фиг.2 сплошными линиями, тогда как временные информационные пути обозначены штриховыми линиями.
На фиг.3 более подробно изображены блок 100, представляющий парусную систему, и блок 200 с бортовой системой из фиг.2. Здесь описано позиционирование и управление кайтом 101. Информация о направлении и скорости ветра, включая параметр порывистости, а также информация о волнении поступают в промежуточную память 211, в которой эти данные хранят для буферизации. Поскольку направление ветра и все настройки кайта относятся к кажущемуся ветру, курсовая информация при обработке не нужна. Настройка и маневрирование паруса по отношению к судну не требуют знания актуального курса, поскольку все маневры относятся к судну и под воздействием кажущегося ветра на кайт. Информация о ветре происходит при развертывании кайта 101 сначала из системы 600 метеоинформации на фиг.2, если речь идет о позиционировании кайта. Как только, однако, его собственное измерение ветра после запуска начнет функционировать, кажущийся ветер определяют в месте самого паруса, поскольку оно является определяющим для позиционирования.
Данные о ветре и волнении образуют, в целом, набор данных, который адресует образующую справочную таблицу память 212 для заданного положения и типа маневра паруса. Эта справочная таблица организована как нормальная адресуемая память, причем выходные данные промежуточной памяти 211 в качестве адресных сигналов адресуют отдельные ячейки памяти, в которых хранятся относящиеся к адресуемым данным данные о состоянии паруса. Подобная «справочная таблица» связывает по типу постоянной памяти, согласно заданной функциональной взаимосвязи, входные и выходные данные между собой, т.е. ее следует понимать как математическое соответствие (функция). Соответствующие блоки образуют, однако, только пример реализации и могут быть также заменены другими произвольными функциональными органами или узлами. При этом речь может идти, например, о микропроцессоре, у которого управляющая программа хранится в соответствующей памяти, или же об электрической схеме, у которой функциональная взаимосвязь установлена по типу аналогового вычислителя за счет участвующих электрических компонентов. Изображение в качестве справочной таблицы выбрано здесь для наглядности, поскольку решение с микропроцессором потому менее наглядно, что различные, последовательно отрабатываемые шаги программы требуют сложных рассуждений о том, какие части программы должны последовательно подаваться к микропроцессору.
У выбранного выполнения управляющие сигналы могут обрабатываться параллельно, причем, однако, не показаны коммутирующие устройства, которые вызывают активирование изображенных блоков в определенное время и соответствующие регулировки. Для простоты следует исходить из того, что поступающий управляющий сигнал, который отличается от прежде возникшего состояния, вызывает обработку в последующих блоках, сохраняющих соответствующее достигнутое состояние, пока изменение сигнала не вызовет новую обработку.
Данные о состоянии включают в себя, следовательно, во-первых, заданное положении паруса, т.е. его направление по отношению к судну, и стравливаемую длину тянущего каната. Кроме того, они содержат, при необходимости, также информацию о том, следует ли, и если да, то по какой хранящейся в памяти команде, маневрировать кайтом 101. В то время как кайтом управляют в некоторых положениях статически, т.е. неподвижно, для эксплуатации судна в определенных случаях благоприятнее управлять кайтом динамически, т.е. совершать им заданные фигуры пилотажа, поскольку в результате повышается его скорость относительно ветра и вследствие этого также его тяговая мощность. В другой памяти 213 хранят актуальное положение кайта 101, определяемое его навигационной системой.
Записанное в памяти 213 фактическое положение кайта относится к судну, и его определяют преимущественно посредством образования разности двух GPS-сигналов. При этом речь идет, во-первых, о GPS-приемнике 124 кайта 101 в пределах системы 100 кайтинга, которая связана с летящим кайтом 101. Полученные в положении полета кайта 101 данные о положении передают посредством передатчика 112 к приемнику 214, находящемуся на борту судна. Другой GPS-приемник 215 также установлен на борту судна. Его выходной сигнал вместе с выходным сигналом приемника 214 подают к блоку 216 вычитания, с помощью которого вырабатывают дифференциальный GPS-сигнал. В подключенном к блоку 216 вычитания блоке 217 дифференциальные данные положения пересчитывают в полярные координаты, которые относятся к расстоянию между лебедкой и положением паруса. Речь при этом идет об углах α и β на фиг.1а, а также о длине L каната. Полученные таким образом дифференциальные GPS-данные о положении имеют большую точность, если их определяют одновременно, а GPS-приемник судна установлен в месте, которое как можно меньше подвержено движениям судна, или если эти движения компенсируются.
Далее необходимо учитывать разность координат между положением лебедки и GPS-приемника посредством вычитания постоянного значения. Полученное с помощью образованного дифференциального GPS-приемника положение определяют в интервалы времени. Если его точности недостаточно, то оно может поддерживаться значениями, определяемыми посредством датчиков 117, 119, 120 ускорений. Соответствующие вычисления, содержащие интегрирование, выполняют в блоке 123. Поскольку в пределах интервалов времени, в которых должно происходить интегрирование, речь идет лишь о времени, которое проходит до следующего GPS-сигнала положения, интеграторам не требуется удовлетворять требования к качеству, которые гарантировали бы стабильность в течение длительных промежутков времени. (Датчики ускорений служат, сами по себе, для стабилизации маневров в полете, как это описано ниже, т.е. приобретают вторую функцию). Кроме того, предусмотрены высотомер 129, выполненный преимущественно в виде барометра, и датчик 128 магнитного поля Земли, данные которого также подают в память для навигационного сигнала 124.
Другой возможностью определения фактического положения паруса по отношению к судну является использование переданных судну данных высотомера 129 и датчика 128 магнитного поля Земли. Эти данные передают на судне в блок 227 и записывают. В блоке 227 происходит затем образование разности с данными высотомера 233 на судне и датчика 234 магнитного поля Земли на судне. Если высотомер 129 представляет собой барометр, то для определения давления воздуха на судне можно использовать также метеоданные из блока 600 (изобары). Полученные таким образом информационные данные о положении подают к блоку 217 и корректируют с GPS-данными. Таким образом, информационные данные о положении двух независимых систем поддерживают друг друга, и при выходе из строя одной системы необходимые данные, тем не менее, имеются в распоряжении.
Считанное из памяти 212 заданное положение кайта подают, с одной стороны, к компаратору 218, который выдает сигнал, если фактическое положение парусной системы 100, хранящееся в памяти 213, совпадает со считанным из памяти 212 заданным положением. В этом случае посредством схемы 219 деблокирования из памяти 220 типов маневров считывают характеризующий выбранный тип маневра набор данных. (При этом статический режим полета может отличаться также тем, что кайт не совершает никаких маневров, а сохраняет свое положение полета. При этом речь идет о типе маневра «нуль»).
При управлении этой памятью 220 типов маневров считывают, следовательно, полетную программу последовательного типа и передают ее автопилоту парусной системы 100. Выходной сигнал памяти 220 поступает при этом на передатчик 221, который определяет данные и подает их к приемнику 113 парусной системы 100. От выхода приемника 113 сигнал поступает в систему автопилота, а оттуда - в блок 114 управления маневрами. Он получает характеризующие определенный последовательный маневр в полете сигналы и преобразует их в значения виражей, подаваемые к полетному процессору 116, который управляет данным маневром. При этом устанавливаемое значение передают в компаратор 115 значений виражей, к которому подают, с другой стороны, входной сигнал измерителя 117 значений рыскания. Полетный процессор 116 создает теперь на своем соответствующем выходе 125 через соответствующий приводной элемент на кайте 101 посредством асимметричного притормаживания кайта 101 или соответствующей аэродинамической деформации криволинейный полет заданной последовательности и продолжительности. Другими аэродинамическими эффектами, управляемыми обоими другими выходами полетного процессора 116, являются установка крыла и зарифление, как это описано ниже.
Из памяти 220b для позиционирования управляют также лебедкой 240 для стравливания каната на определенную заданную длину.
Во избежание качания вокруг вертикальной оси к полетному процессору 116 с наложением на управляющий сигнал с фазовым сдвигом дополнительно подают отфильтрованный фильтром высоких частот сигнал, что предотвращает размах. В то время как через выход 125 можно управлять движениями рыскания, через выход 126 настраивают установку несущего крыла. Как известно, степень установки крыла позволяет оптимизировать отношение между лобовым сопротивлением и подъемной силой. Через дополнительный выход 127 можно инициировать зарифление кайта 101. Зарифление изменяет подъемную силу и сопротивление и может потребоваться при отдельных маневрах.
Поскольку кайт прочно закреплен на тянущем канате, он за счет его тянущего действия автоматически стабилизируется в центре приложения подъемной силы относительно своих движений крена и наклона. Чтобы также и здесь исключить раскачивание, к полетному процессору через соответствующие инвертирующие фильтры 121, 122 верхних частот подают соответствующим образом сигналы положения датчика 119 крена и датчика 120 наклона, что предотвращает и компенсирует резкие изменения положения паруса 101.
Если кайт находится, следовательно, в своем заданном положении (на выходе компаратора 218 возникает характеризующий это состояние выходной сигнал), то считывается выбранный тип маневра, который заставляет кайт выполнять заданную циклическую полетную программу. Когда этот тип маневра передан, автопилот автоматически управляет парусом, а блоку 200 больше не приходится реагировать, если кайт не покидает своего заданного положения из-за непредвиденных ситуаций.
Если номинальное положение паруса 101 не совпадает с его заданным положением, будь то из-за изменения заданного положения, считываемого из памяти 212, что происходит также при развертывании кайта, или из-за того, что кайт в ходе маневрирования покидает свое положение, то выходной сигнал пропадает на выходе компаратора 218, и активированный коммутирующим устройством 219 тип маневра из памяти 220 заканчивается. На выходе памяти 220 для типов маневров (левая часть) возникает сигнал «нуль», а это интерпретируется автопилотом парусной системы 100 таким образом, что маневр, записанный в память последним, не выполняется. Вместо этого фактическое положение кайта, считываемое из памяти 213 и полученное через GPS, сравнивают с заданным положением из памяти 212 посредством блока 221 корректировки положения и определяют маневр, который приводит кайт в заданное положение. Корректировочный блок 221 также выполнен в виде справочной таблицы, причем заданное и фактическое положения (также по отношению к судну) объединяют в один общий сигнал адресации и считывают характеристику соответствующего корректировочного маневра паруса из фактического положения А в заданное положение В. Следует лишь обратить внимание на то, что в зависимости от запуска и целевой точки (а также, при необходимости, в зависимости от ветровых условий и условий волнения) должны быть выбраны различные маневры кайта. Благодаря указанным мерам могут быть выбраны любые маневры, совершаемые кайтом.
Если при совершении маневров играют роль ветер и волнение, то эти данные из памяти 211 могут быть «пропущены» через справочно-табличные памяти 212 и 221, благодаря чему они еще содержатся в наборе данных для выбора специфического маневра, и может быть выбран подходящий маневр. При этом, однако, речь идет не об уравнивании отдельных событий, а об универсальных правилах настройки, которые могут включать в себя, например, то, что при сильном волнении кайт заставляют летать так, чтобы действующие за счет направления волн на водное транспортное средство силы, по возможности, компенсировались. Так, при сильном крене судна следовало бы предпочесть положение кайта с поперечной составляющей, а при сильной килевой качке - с продольной составляющей. По этой причине выходной сигнал блока 231 для регистрации волнения подают непосредственно к блоку 211, чтобы добавить информацию, которая при выборе соответствующего положения кайта и при маневрировании также действует в описанном выше смысле. Другая функция этой связи состоит в выборе частей маневров так, чтобы они противодействовали ускорениям из-за волнения. Сюда относится такое совершение маневров с циклическими траекториями полета, при которых различные тянущие усилия на тянущем канате действуют в разное время, чтобы эти силы возникали с фазовым сдвигом по отношению к ускорениям, вызванным волнением. Таким образом, в целом, уменьшаются движения судна. Эта компенсация или это уменьшение движений судна за счет различных тянущих усилий, вызванных маневрированием, не мешает остальным применяемым способам компенсации волнения. Причина этого в том, что уменьшенные с самого начала движения судна требуют меньше затрат при уменьшении их влияний на траекторию полета кайта. В связи с компенсацией отдельных движений судна ниже будет проводиться описание блока 231.
Для смены положения правую часть памяти 220 через коммутирующее устройство 222 адресуют со считанным из корректировочного блока 221 набором данных, причем коммутирующее устройство 222 активируют выходным сигналом компаратора посредством инвертора 223, если не активировано коммутирующее устройство 219, т.е. заданное и фактическое положения неодинаковы.
Кроме того, для положения паруса может играть роль также его устойчивость в полете. Установленный на кайте многонаправленный приемник 111 воздушных давлений образует, с одной стороны, анемометр, а с другой стороны, передает для измеренной в направлении полета составляющей состояние слишком низкого набегающего на кайт потока посредством соответствующего сигнала, который вместе с совершением маневра смены положения управляет также блоком 240 управления лебедкой, в результате чего кайт при смене положения ускоряется, так что набегающий поток снова возрастает. (Видно, что лебедка даже при «желаемых» изменениях положения на основе данных о ветре и волнах может управляться правой частью памяти 220b, с тем, чтобы, например, можно было вызвать изменение высоты паруса).
Для определения истинных направления и скорости ветра анемометр содержит направленные в разных направлениях приемники воздушных давлений с анероидными коробками, оцениваемыми отдельно. По значениям давления трех направленных под прямым углом друг к другу анероидных коробок с максимальными значениями давления можно определить направление и скорость ветра по отношению к ориентации анемометра 111. Если принять также в расчет выходной сигнал датчика 128 магнитного поля, содержащего мостовую схему из магнитно-чувствительных резисторов и обеспечивающего, тем самым, определение направления линий магнитного поля Земли, то можно отнести направление ветра к северному направлению и передать на водное транспортное средство, тем самым, в качестве направления кажущегося ветра. Там происходит тогда, при необходимости, корректировка магнитного Севера в географический Север.
Направленная к блоку 211 стрелка указывает, что нормальная навигация кайта не функционирует. Через вентиль 224 ИЛИ, предвключенный инвертору 223, прекращают также остальное нормальное управление маневрированием. (Это относится, соответственно, и к описанным ниже блокам 228, 229, 230, 232, активирующим другие специальные функции. Соответствующие сигнальные связи для наглядности опущены).
Через блок 228 посредством выбора и запуска соответствующего типа маневра инициируют аварийный маневр «аварийный сброс» с помощью правой части памяти 220b типов маневров, содержащей соответствующие программирования. Этот маневр необходим, если от паруса из-за неблагоприятных обстоятельств или аварии исходит большая опасность для судна (например, в результате столкновения с препятствием). При совершении этого маневра парус полностью отделяют от судна.
Через блок 229 «развертывание» и блок 230 «уборка» инициируют соответствующие маневры посредством выбора и запуска соответствующего типа маневра с помощью правой части памяти 220b типов маневров, содержащей соответствующие программирования.
Через блок 231 «движения судна» с помощью соответственно ориентированного датчика ускорений определяют направленную в направлении тянущего каната составляющую ускорения и после интегрирования вырабатывают сигнал, который описывает движения судна в направлении тянущего каната. Этот сигнал подают к бортовому GPS-приемнику, который подает корректированный для положения блока 240 управления лебедкой сигнал положения, в случае, если приемник или антенна сами не установлены в этом положении. Если бы этот GPS-сигнал положения оценивался непосредственно вместе с принятым приемником 214 GPS-сигналом положения системы 100 кайтинга и использовался для управления кайтом 101, то он следовал бы при своем управлении за движениями лебедки во время волнения. Поскольку он, однако, должен совершать свои маневры по отношению к воображаемому успокоенному положению судна, интегрированный сигнал датчика ускорений в блоке 231 дополнительно подают к GPS-приемнику 215, чтобы (в качестве помехи) вычесть из сигнала, подаваемого для обработки к блоку 216, так что в нем обрабатывают сигнал положения «успокоенной платформы». Таким образом, кайт 101 совершает маневры, свободные от помех в результате волнения. Видно, что действующие, главным образом, в направлении тянущего каната компоненты волнения становятся заметными для летающего объекта, а направленные поперек них компоненты способствуют лишь исчезающему именно при длинном тянущем канате изменению углов α и β вектора полета и являются, тем самым, пренебрежимо малыми.
Для того, чтобы в изображенном примере выполнения постоянно не попадать в ситуацию, в которой при сильном волнении совершаемый маневр приходится прерывать из-за констатации отклонения в дифференциальном блоке 218 и совершать управляемый «полет» в правильном положении (в этом случае за счет активирования лебедки 240 с помощью правого маневрового блока 220b), существует прямая связь от блока 231 к блоку 240 управления лебедкой. Последний получает непосредственно команду в соответствии с констатацией движения волнения в направлении тянущего каната посредством блока 231 на стравливание и выбирание тянущего каната, в результате чего движения судна для кайта непосредственно компенсированы. Только если этой компенсации по какой-либо причине больше недостаточно, активируют корректировку положения посредством соответствующего маневра.
Для того, чтобы иметь возможность инициировать маневры также вручную, соответствующие команды ввода возможны через пользовательское устройство 232 ввода, являющееся частью пользовательской поверхности 205 на фиг.2. С помощью соответствующих команд можно в левой части 220а маневровой памяти для ручных команд с подавлением выдачи остальных сигналов из этой памяти передавать непосредственно управляющие команды к блоку автопилота и блоку 240 управления лебедкой. При этом речь идет о функциях «влево», «вправо», «зарифление», «разрифление», «установка (+)», «установка (-)», «лебедка (+)», «лебедка (-)». Все команды могут модулироваться по своей интенсивности.
У одного содержащегося в описанном выполнении варианта «предусмотрительное маневрирование» происходит таким образом, что в систему для расчета актуального положения паруса вводят фиктивные данные о ветре и курсе и устанавливающуюся конфигурацию отображают для информации. На этой основе штурман может затем оценить предсказуемое поведение системы и соответственно настроить навигацию. Эта многократная обработка данных по типу условного предвидения изображена на фиг.3 посредством многократных углов на углах различных блоков памяти, а это должно обозначать, что содержимое этих блоков памяти многократно оценивают независимо от актуального управления процессом. При этом, следовательно, предусмотрены дополнительные средства памяти и сравнения, которые обеспечивают хранение соответствующих предыдущим моментам времени сигналов с возникающими позднее по времени сигналами с возможностью сравнения следующих друг за другом по времени маневровых состояний с принятием за основу различных - также фиктивных - входных данных.
На фиг.4 более подробно изображен пример выполнения управления 240 лебедкой системы позиционирования для системы ветрового привода. Механические элементы лебедки сгруппированы при этом на общем приводном валу 244. При этом выходной сигнал правой части памяти 220b на фиг.3, представляющий стравливаемую длину каната, подают к памяти 245, которая сохраняет эту заданную длину каната в виде цифрового числового значения. Содержащееся в памяти 245 цифровое значение подают к пропорциональному компаратору 246, который вычитает это значение из другого значения, подаваемого к нему импульсным счетчиком 247. Этим импульсным счетчиком 247 управляет, в свою очередь, работающий, в частности, по фотоэлектрическому принципу датчик 248 положения, соединенный с направляющей тянущий канат 11 головкой 249 шпиля. Стравленная длина тянущего каната 11 может сообщаться также иным образом, например, посредством нанесенных на сам тянущий канат оптических, магнитных или прочих меток, регистрируемых соответствующими датчиками.
Тянущий канат 11 приводят в движение с фрикционным замыканием посредством многократного обвива вокруг головки 249 шпиля, причем канат хранится в схематично обозначенном отсеке 250. В одном альтернативном варианте (не показан) тянущий канат может разматываться также с барабана, который тогда заменяет головку шпиля. Другим предпочтительным примером выполнения (не показан) является головка шпиля рядом с барабаном, служащим в качестве накопителя каната. В остальном конструкция остается соответствующей.
Головку 249 шпиля приводят двигателем 251. Двигатель содержит преимущественно встроенный редуктор (не показан). Импульсный счетчик 247 определяет фактически размотанную длину каната посредством подсчета подаваемых датчиком 248 положения импульсов, число которых пропорционально вращению головки 249 шпиля. В одном альтернативном варианте (не показан) длину можно определить посредством прилегающего непосредственно к канату фрикционного колеса с датчиком импульсов. Подаваемый пропорциональным компаратором 246 сигнал соответствует, следовательно, в зависимости от его полярности длине каната, еще наматываемой или разматываемой головкой 249 шпиля. Этот выходной сигнал пропорционального компаратора 246 непосредственно в качестве пропорциональной доли подают через суммирующую точку 260 к датчику 252 характеристик, который вырабатывает пропорциональный длине каната управляющий сигнал для двигателя 251. Выходной сигнал датчика характеристик ограничен по линейному направлению в сторону высоких и низких значений, так что возникает нелинейная характеристика. Крутизна характеристики согласована со свойствами каната таким образом, что этим предотвращается также избыточное растяжение. Линейная область характеристики согласована с упругими свойствами каната, тогда как при угрозе перегрузки происходит ограничение усилия, так что канат может свободно разматываться в случае угрозы разрыва.
Вплоть до названных предельных значений, следовательно, управление двигателем 251 предпочтительно пропорционально стравливаемой или выбираемой длине каната. Из этого вытекает характеристика привода, сравнимая с характеристикой пружины. Если двигатель 251 представляет собой электродвигатель, крутящий момент которого пропорционален подводимому току, то достаточно соединить выход датчика 252 характеристик с выполненным в этом случае в виде источника тока источником 253 энергии. Датчик характеристик задает для соответствующей входной величины крутящий момент, который должен действовать на ведомый вал двигателя. Крутизна характеристики определяет «реакционную способность» лебедки по соответствующим управляющим сигналам. Ее можно регулировать для удовлетворения различным эксплуатационным условиям (например, размер паруса). При эксплуатации крутизну характеристики регулируют так, что движения лебедки устанавливаются ниже «нервного» реакционного поведения.
У приводов иного рода может происходить, однако, так, что источник 253 энергии вырабатывает иную величину энергии, которая не приводит непосредственно к пропорциональному крутящему моменту на приводном двигателе 251. Это может быть, например, случай, когда во взрывоопасном окружении, как это бывает, например, на танкерах, нельзя использовать электроприводы. В этом случае двигатель 251 может быть выполнен в виде парового или гидродвигателя, в частности, однако, в виде гидродвигателя регулируемого объема или в виде пары гидродвигатель регулируемого объема/гидронасос, причем на ведомом валу установлено устройство 254 для измерения момента, выходные сигналы которого подают к подключенной к датчику 252 характеристик точке 255 обратной связи с отрицательной полярностью.
Подаваемый источником энергии сигнал повышают при этом до тех пор, пока он не будет компенсирован сигналом отрицательной обратной связи устройства 254 для измерения момента. Таким образом, любые приводные двигатели позволяют создавать желаемую характеристику. Далее, на сигнальном пути между пропорциональным компаратором 246 и датчиком 252 характеристик включен интегратор 256, который предотвращает остаточное рассогласование при настройке длины каната за счет того, что он увеличивает или уменьшает подаваемый к датчику характеристик сигнал тем больше, чем дольше он продолжается. Далее параллельно ему включен регулируемый фильтр 258 с подключенной точкой 259 вычитания, причем фильтр рассчитан с возможностью, в частности, пропускания резонансных частот каната, включая лебедку, и их подавления за счет отрицательной обратной связи. Фильтр 258 является изменяемым по своей частоте, причем на настройку частоты влияет выходной сигнал импульсного счетчика 247, который выдает значение, соответствующее стравленной длине каната.
Таким образом, фильтр изменяется по своей частоте в соответствии с длиной каната, так что могут быть компенсированы возможные резонансы, на которые в отношении их частоты влияет длина каната. В изображенном примере выполнения учтена лишь тенденция изменения, если исходить из линейной регулировки. Если требуется достичь точного согласования, следующего за квадратичной или прочей функциональной характеристикой, то в линию от импульсного счетчика следует включить соответствующий функциональный датчик, который может быть выполнен также в виде цифровой справочной таблицы в соответствии с другими изображенными примерами выполнения. При адресации посредством соответствующего длине каната цифрового значения происходит выдача управляющей величины, соответствующей настройке желаемой частоты фильтра. У цифрового фильтра это соответствующие цифровые управляющие команды. У выполненного аналоговым фильтра с варикапами генератор напряжения программируют посредством соответствующей управляющей величины для настройки соответствующего выходного напряжения с целью управления.
Изображенная схема представляет собой цифровой регулятор, так что интегратор 256 и фильтр 258 также являются цифровыми. Выходной сигнал датчика 248 положения представляет степень действующих на кайт усилий и их временную характеристику, так что он может быть привлечен для оценки активности кайта.
Чтобы компенсировать влияния движений судна на управление канатом, предусмотрен датчик 265 ускорений, установленный вблизи лебедки и действующий в направлении каната. Подключенный интегратор 266 преобразует полученные значения ускорения в соответствующие сигналы пути, действующие также в направлении каната. Таким образом, действующая в направлении каната составляющая движений судна компенсируется соответствующими наматыванием и сматыванием каната, так что движения судна не влияют на положение кайта.
Выполненный предпочтительно дисковым тормоз 261 установлен на валу двигателя для тех случаев, когда, например, при спокойном море движений каната не требуется. Им управляют посредством дифференциатора 262 с подключенным триггером Шмитта 263, который подает сигнал только тогда, когда выходной сигнал дифференциатора 262 превышает заданное значение, т.е. изменяется управляющее напряжение для двигателя 251. Выходной сигнал триггера Шмитта тогда через инвертор 264 (и соответствующее запускающее устройство (не показано)) отпускает тормоз и активирует источник энергии (запускающее устройство) для двигателя. В противном случае тормоз 261 остается притянутым и дезактивируется. Таким образом, экономится мощность для приводного двигателя 251.
В одном альтернативном варианте (не показан) дополнительно к первому, действующему со стороны двигателя дисковому тормозу 261 может быть предусмотрен еще один, воздействующий непосредственно на головку 249 шпиля ленточный тормоз. Это предпочтительно, например, в отношении требуемой со стороны некоторых разрешительных органов удвоенной безопасности, поскольку даже при поломке редуктора двигателя или вала 244 возможно торможение головки шпиля.
Описанные выше блоки обеспечивают, чтобы канат стравливался каждый раз на заданную длину, а лебедка действовала в качестве как бы «упругого элемента» для противодействия чрезмерному растяжению каната. Кроме того, демпфируются процессы резонанса на канате, так что из-за устанавливающихся условий резонанса не могут возникнуть превышения усилий, угрожающие канату.
Другая мера обеспечивает теперь еще и то, что волнение и возникающие в результате этого движения судна не влияют или влияют лишь контролированно на положение паруса 101. Этому служит блок 231 (фиг.3), содержащий датчик 265 ускорений, действующий в направлении каната. Выходной сигнал датчика 265 ускорений подают к интегратору 266, который преобразует ускорения в отрезок пути в направлении каната. Через подключенные дозатор/инвертор сигнал поступает затем на суммирующую точку 257 и подается к пропорциональному компаратору 246. За счет блока 267 положение кайта 101 изменяется по отношению к судну каждый раз на величину движений судна за счет стравливания и выбирания каната, так что он (кайт) сохраняет свою высоту по отношению к усредненной поверхности моря и не подвержен влиянию движений судна. Это благоприятно, в частности, в условиях слабого ветра и господствующей зыби, когда на полет кайта не должны влиять дополнительные усилия.
Может быть также желательным демпфировать движения судна за счет аэродинамического сопротивления паруса, в то время как кайт летит устойчиво. Для этого предусмотрен потенциометр 267, обеспечивающий дозирование и переполюсовку выходного сигнала интегратора 266. Таким образом, можно дозировать и переполюсовывать ту долю, с которой интегрированный сигнал движения судна действует на положение кайта в направлении каната, так что он может демпфировать либо движения кайта, либо движения судна.
В отношении подробностей отдельных элементов примера осуществления изобретения следует сослаться на одновременно поданные параллельные патентные заявки того же заявителя.
Изобретение не ограничено описанными примерами его осуществления. Другие лежащие в рамках изобретения конфигурации следуют из комбинаций зависимых пунктов формулы, раскрывающихся для специалиста на основе настоящего описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАЗВЕРТЫВАНИЯ ВЗЛЕТАЮЩЕГО ПАРУСА В ВИДЕ КАЙТА НА ВОДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ С ВЕТРОВЫМ ПРИВОДОМ | 2005 |
|
RU2359863C2 |
| СУДНО, СОДЕРЖАЩЕЕ СВОБОДНО ЛЕТЯЩИЙ, ТИПА ВОЗДУШНОГО ЗМЕЯ, АТАКУЕМЫЙ ВЕТРОМ ЭЛЕМЕНТ В КАЧЕСТВЕ ВЕТРОВОГО ПРИВОДНОГО БЛОКА | 2005 |
|
RU2369521C2 |
| Способ транспортировки ледового образования | 2023 |
|
RU2809879C1 |
| ВЕТРОВАЯ СИСТЕМА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ПОСРЕДСТВОМ ПЕРЕМЕЩЕНИЯ НА РЕЛЬСЕ МОДУЛЕЙ, БУКСИРУЕМЫХ КАЙТАМИ, И ПРОЦЕСС ДЛЯ ВЫРАБОТКИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПОСРЕДСТВОМ ТАКОЙ СИСТЕМЫ | 2012 |
|
RU2615549C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| ПАРУСНЫЙ НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ КУЩЕНКО В.А. | 2009 |
|
RU2403171C1 |
| ВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕМЕНТОМ В ВИДЕ ВОЗДУШНОГО ЗМЕЯ | 2005 |
|
RU2374128C2 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| МОТОРНО-ПАРУСНОЕ СУДНО | 2006 |
|
RU2331548C1 |
| Швартовая лебедка | 1985 |
|
SU1392020A1 |
Группа изобретений относится к позиционирующему устройству для свободно взлетающего паруса типа кайта на водном транспортном средстве с ветровым приводом. Позиционирующее устройство для свободно взлетающего паруса типа кайта, выполненного с профилем несущего крыла, используемого в качестве исключительного, вспомогательного или аварийного привода, который соединен тянущим канатом с водным транспортным средством. Устройство имеет лебедку, содержащую средства, которые при первом тянущем усилии ниже заданного и/или предстоящем или произошедшем срыве потока вызывают выбирание и/или при превышении первого тянущего усилия, и/или при превышении заданной скорости набегающего потока вызывают стравливание тянущего каната. Водное транспортное средство с позиционирующим устройством для получения энергии содержит приводимый течением воды вне водного транспортного средства генератор, который подает выработанную электрическую энергию к аккумулятору энергии. Обеспечивается возможность автоматического согласования положения паруса в соответствии с ветровыми условиями. 2 н. и 15 з.п. ф-лы, 6 ил.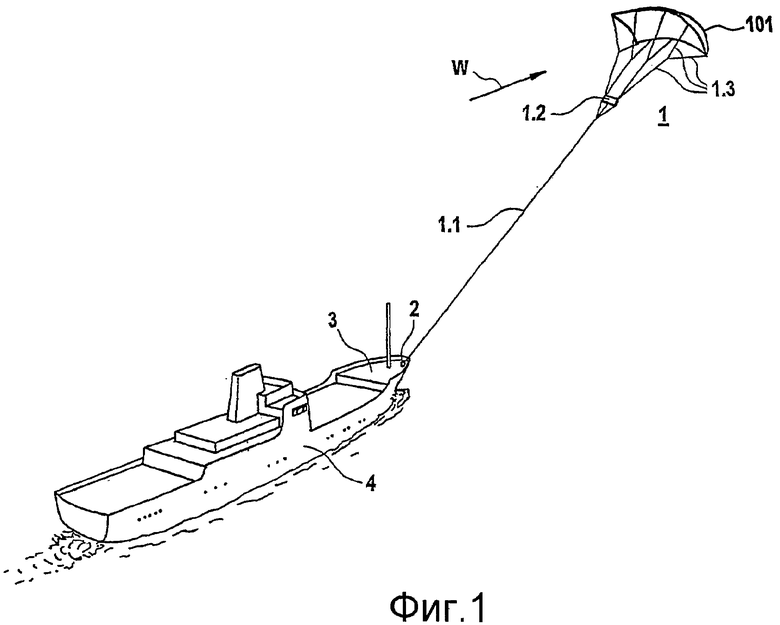
1. Позиционирующее устройство для свободно взлетающего паруса (1) типа кайта, с профилем несущего крыла в качестве исключительного, вспомогательного или аварийного привода, который соединен тянущим канатом (1,1) с водным транспортным средством, отличающееся тем, что предусмотрена лебедка (2), содержащая средства, которые при первом тянущем усилии ниже заданного и/или предстоящем или произошедшем срыве потока вызывают выбирание и/или при превышении первого тянущего усилия и/или при превышении заданной скорости набегающего потока вызывают стравливание тянущего каната (1,1).
2. Устройство по п.1, отличающееся тем, что предусмотрены дополнительные средства для инициирования выбирания и стравливания только тогда, когда выбирание на длину меньше заданной, а стравливание на длину больше заданной или срыв потока продолжается в течение заданного периода времени, который, при необходимости, может быть установлен для каждого функционального направления по-разному.
3. Устройство по п.1 или 2, отличающееся тем, что средства выполнены таким образом, что выходной сигнал датчика для предстоящего или уже произошедшего срыва потока подают к преобразователю, который управляет лебедкой (2) для укорочения тянущего каната (1,1) с возможностью возрастания набегающего на парус (1) потока таким образом, что подъемной силы паруса (1) достаточно, по меньшей мере, для его удержания в воздухе.
4. Устройство по п.1 или 2, отличающееся тем, что средства выполнены таким образом, что если набегающий поток превышает заданное значение, то длину тянущего каната (1,1) снова последовательно увеличивают, пока он не достигнет, по существу, своей длины перед укорочением.
5. Устройство по п.1 или 2, отличающееся тем, что привод (240) лебедки имеет заданную характеристику «крутящий момент-длина каната», которая возникает с заданной постоянной задержки всегда в зоне актуально стравленной длины каната, так что происходит демпфирование толчков каната.
6. Устройство по п.1 или 2, отличающееся тем, что привод (240) лебедки имеет заданную характеристику «крутящий момент-длина каната», которая возникает с заданной постоянной задержки всегда в зоне актуально стравленной длины каната, так что происходит демпфирование толчков каната, и характеристика включает в себя ограничение усилия ниже максимальной нагружаемости каната (1,1).
7. Устройство по п.1 или 2, отличающееся тем, что отношение «усилие/длина» лебедки (2) включает в себя демпфирование процессов резонанса на канате (1,1) в зависимости от стравленной длины каната.
8. Устройство по п.1 или 2, отличающееся тем, что скорость лебедки при выбирании создает минимальную скорость набегающего на парус (1) потока, которой достаточно для поддержания его летательной способности под нагрузкой за счет тянущего каната (1,1).
9. Устройство по п.1 или 2, отличающееся тем, что предусмотрены средства для подтягивания паруса (1), если скорость ветра меньше, чем требуется для поддержания его летательной способности под нагрузкой за счет тянущего каната (1,1).
10. Устройство по п.1 или 2, отличающееся тем, что предусмотрены средства для подтягивания паруса (1), если есть опасность столкновения с предметом под водой, в воде, на суше или в воздухе в течение отрезка времени, которое меньше или равно времени, по меньшей мере, необходимому для подтягивания паруса (1) при максимальной скорости лебедки.
11. Устройство по п.1 или 2, отличающееся тем, что предусмотрены средства для предусмотрительного подтягивания паруса (1), если навигационные ограничения препятствуют управлению парусом (1).
12. Устройство по п.1 или 2, отличающееся тем, что, если в течение заданного интервала времени скорость набегающего потока не будет ниже минимальной или будет принят или получен метеосигнал, указывающий повышенную скорость ветра или благоприятствующее движению по курсу направление ветра, происходит стравливание каната (1,1) каждый раз на заданную дополнительную величину длины и поддержание этой длины, если при стравленной дополнительной длине каната его натяжение не уменьшается.
13. Устройство по п.1 или 2, отличающееся тем, что выбирание и стравливание, в частности, при более сильном волнении на море, осуществляется с возможностью уменьшения нежелательных движений судна в направлении каната посредством сдвинутого по фазе по отношению к направлению каната привода, чтобы компенсировать движения судна по отношению к парусу (1), или при соответствующем управлении с фазовым сдвигом движения судна (4) в результате волнения уменьшаются за счет движения паруса (1).
14. Устройство по п.1 или 2, отличающееся тем, что лебедка (2) приводится в движение средой под давлением.
15. Устройство по п.1 или 2, отличающееся тем, что привод (240) лебедки выполнен в виде гидронасоса регулируемого объема.
16. Устройство по п.1 или 2, отличающееся тем, что предусмотрен аварийный агрегат для выработки необходимой для работы лебедки (2) энергии даже при выходе из строя первичного источника энергии.
17. Водное транспортное средство с позиционирующим устройством по п.1 или 2, отличающееся тем, что для получения энергии предусмотрен приводимый течением воды вне водного транспортного средства, в частности, через гребной винт или турбину, генератор, который подает выработанную электрическую энергию к аккумулятору энергии, в частности, водородному генератору с подсоединенной к нему емкостью для хранения.
| СПОСОБ ПРОДУКТИВНОГО ПЧЕЛОВОЖДЕНИЯ СО СТАНДАРТНЫМИ РАМКАМИ | 1996 |
|
RU2098952C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ОХЛАДИТЕЛЬНЫМ ДОЖДЕВАНИЕМ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 1993 |
|
RU2098946C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПЛАНИРУЮЩИМ ПАРАШЮТОМ | 1994 |
|
RU2094325C1 |
| Водное транспортное средство | 1984 |
|
SU1174325A1 |

