Изобретение относится к системам управления двигательными действиями и функциональным состоянием человек может быть использовано, в частност в тренировочном процессе.
По основному авт.св. № 711715, известна система управления двигательными действиями биологического объекта, содержащая блок измерения физических параметров окружающей срды, блок измерений биомеханических и медикобиологических параметров биологического объекта, внешнее управляющее устройство, исполнительные органы для изменения физических параметров окружающей среды, блоки согласования внутренней управляющей системы с внешней и внешней управляюв(ей системы с внутренней, исполнительные органы для измерения биопотенциальной энергии биологического объекта, причем выходы блок-а измерения биомеханических и медико-биологических параметров биологического объекта и блока согласования внутренней управляющей системы с внешней подключены к входам внешнего управляющего устройства, выходы которого подключены к входу блока согласования внешней управляющей системы с внутренней и входом исполнительных органов для изменения биопотенциальной энергии биологического объекта и физических параметров окружающей среды iJ.
В этой системе отсутствует компенсация эффекта адаптации человека к управляемым воздействиям, что увеличивает время обучения двигательным действиям.
Цель изобретения - сокращение времени обучения и снятие адаптации к стимулирзпощим воздействиям.
Цель достигается тем, что в систему управления двигательными действиями биологического объекта введены последовательно соединенные блок оценки работоспособности и меры утомления мьшц двигательного аппарата, состоящий из устройства возбуждения мьщщ и соединенных между собой измерителя характеристик индуцированных механических колебаний биомеханического звена и анализатора, а также блок коррекции режимов работы исполнительных механизмов, выход которого подключен к исполнительным механизмам, при этом
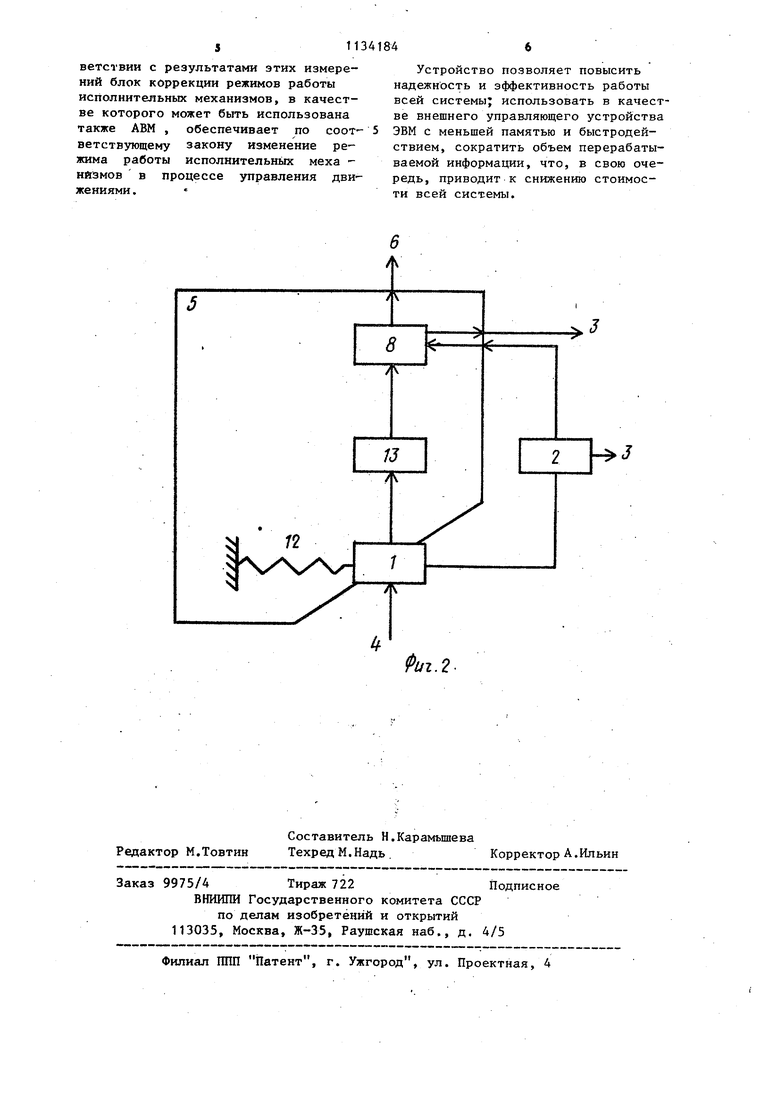
входы блока оценки работоспособности и меры утомления мьшгц двигательного аппарата соединены с биологическим объектом и вторьм выходом 5 блока измерения биомеханического и медико-биологических параметров объекта управления, а выход - с четвертым входом внешнего управляющего устройства. О На фиг.1изображена блок-схема
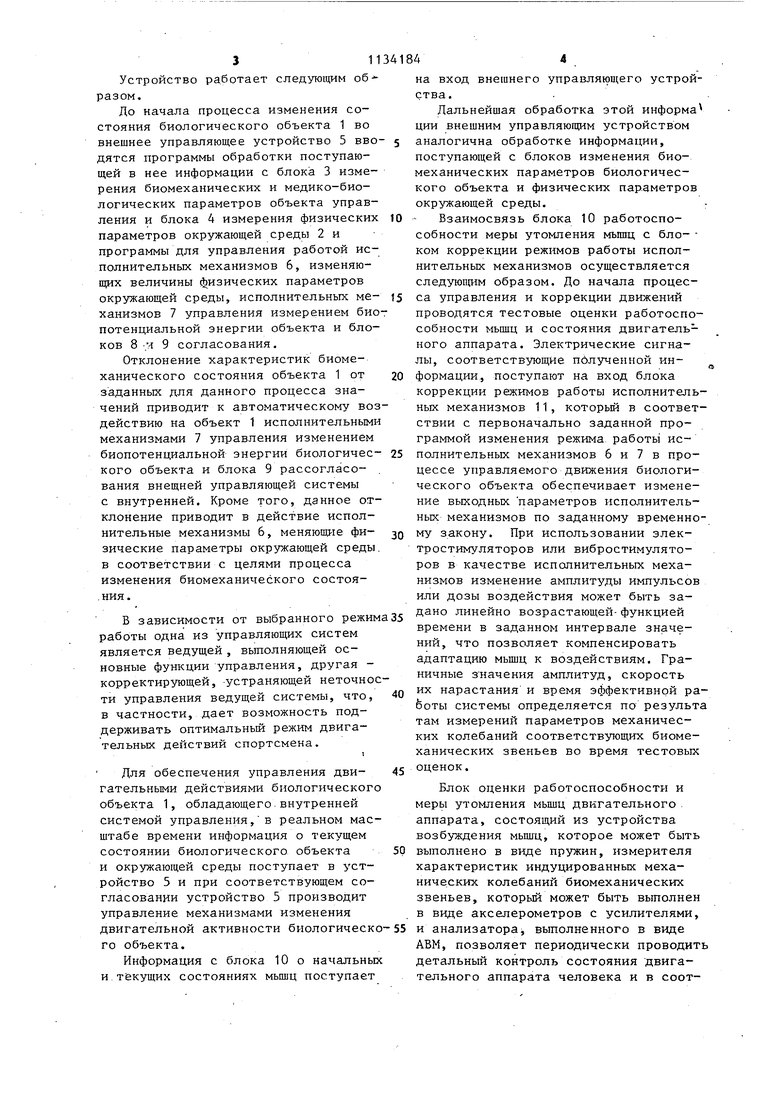
системы; на фиг.2 - схема блока оценки работоспособности двигательного аппарата.
5 Система управления двигательными действиями биологического объекта содержит биологический объект 1 управления с внутренней системой управления, окружающую среду 2, вза-
0 имодействующую с биологическим объектом, блок 3 измерения биомеханических и медико-биологических параметров объекта управления, блок 4 измерения физических параметров окру5 жающей среды, внешнее управляющее устройство 5, исполнительные механизмы 6 для изменения физических па-, раметров окружающей среды, исполнительные механизмы 7 изменения биопо0 тенциальной энергии биологического
объекта, блок 8 согласования внутренней управляющей системы с внешней, I блок 9 согласования внешней управляющей системы с внутренней, блок 10
- оценки работоспособности и меры утомления мышц двигательного аппарата и блок 11 коррекции режимов работы исполнительных механизмов, при этом вход блока оценки работоспособности
Q и меры утомления мышц двигательного аппарата человека связан с биологическим объектом и с блоком измерений биомеханическихи медико-биологических параметров биологического объек5 та, а его выход соединен со входом внешнего управляющего устройства и со входом устройства коррекции режимов работы исполнительных механизмов, выход которого соединен со входом исполнительных механизмов изменения бипотенциальной энергии биологического объекта. Блок оценки работоспособности и меры утомления мышц содержит устройство возбуждения мьш1ц,
выполненное в виде упругого элемента 12, измеритель характеристик индуцированных механических колебаний биомеханического звена 13 и анализатор.
311
Устройство работает следующим образом.
До начала процесса изменения состояния биологического объекта 1 во внешнее управляющее устройство 5 вво дятся программы обработки поступающей в нее информации с блока 3 измерения биомеханических и медико-биологических параметров объекта управления и блока 4 измерения физических параметров окружающей среды 2 и программы для управления работой исполнительных механизмов 6, изменяющих величины физических параметров окружающей среды, исполнительных механизмов 7 управления измерением биопотенциальной энергии объекта и блоков 8 -Л 9 согласования.
Отклонение характеристик биомеханического состояния объекта 1 от заданных для данного процесса значений приводит к автоматическому воздействию на объект 1 исполнительными механизмами 7 управления изменением биопотенциальной энергии биологического объекта и блока 9 рассогласования внещней управляющей системы с внутренней. Кроме того, данное отклонение приводит в действие исполнительные механизмы 6, меняюшяе физические параметры окружающей среды, в соответствии с целями процесса изменения биомеханического состоя.ния.
В зависимости от выбранного режим работы одна из управляющих систем является ведущей , выполняющей основные функции управления, другая корректирующей, -устраняющей неточности управления ведущей системы, что, в частности, дает возможность поддерживать оптимальный режим двигательных действий спортсмена.
Для обеспечения управления двигательными действиями биологического объекта 1, обладающего внутренней системой управления,в реальном масщтабе времени информация о текущем состоянии биологического объекта и окружающей среды поступает в устройство 5 и при соответствующем согласовании устройство 5 производит управление механизмами изменения двигательной активности биологическо го объекта.
Информация с блока 10 о начальных и ТЕКУЩИХ состояниях мышц поступает
44
на вход внешнего управляющего устройства.
Дальнейшая обработка этой информа ции внешним управляющим устройством аналогична обработке информации, поступающей с блоков изменения биомеханических параметров биологического объекта и физических параметров окружающей среды.:
Взаимосвязь блока 10 работоспособности меры утомления мыщц с бло- ком коррекции режимов работы исполнительных механизмов осуществляется следуюпщм образом. До начала процесса управления и коррекции движений проводятся тестовые оценки работоспособности мышц и состояния двигательного аппарата. Электрические сигналы, соответствующие пблученной информации, поступают на вход блока коррекции режимов работы исполнительных механизмов 11, который в соответствии с первоначально заданной программой изменения режима работы исполнительных механизмов 6 и 7 в процессе управляемого движения биологического объекта обеспечивает изменение выходных параметров исполнительных механизмов по заданному временному закону. При использовании электростимуляторов или вибростимуляторов в качестве исполнительных механизмов изменение амплитуды импульсов или дозы воздействия может быть задано линейно возрастающей- функцией времени в заданном интервале значений, что позволяет компенсировать адаптацию мышц к воздействиям. Граничные значения амплитуд, скорость их нарастания и время эффективной раёоты системы определяется по результа там измерений параметров механических колебаний соответствующих биомеханических звеньев во время тестовых оценок.
Блок оценки работоспособности и меры утомления мышц двигательного аппарата, состоящий из устройства возбуждения мьщ1ц, которое может быть выполнено в виде пружин, измерителя характеристик индуцированных механических колебаний биомеханических звеньев, который может быть выполнен в виде акселерометров с усилителями, и анализатора, выполненного в виде АВМ, позволяет периодически проводить детальный контроль состояния двигательного аппарата человека и в соответствии с результатами этих измерений блок коррекции режимов работы исполнительных механизмов, в качестве которого может быть использована также АВМ , обеспечивает по соответствующему закону изменение режима работы исполнительных меха нйэмов в процессе управления движениями ,
Устройство позволяет повысить надежность и эффективность работы всей системы; использовать в качестве внешнего управляющего устройства ЭВМ с меньшей памятью и быстродействием, сократить объем перерабатываемой информации, что, в свою очередь, приводит к снижению стоимости всей системы.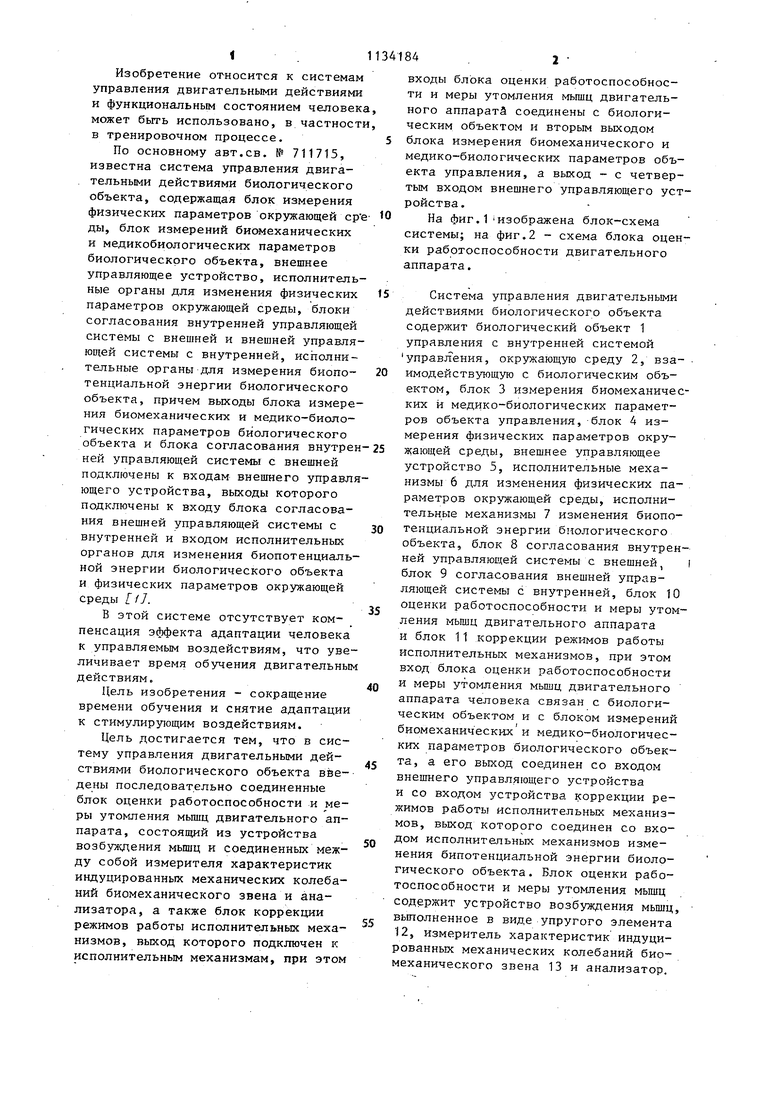
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления двигательным действием биологического объекта | 1977 |
|
SU711715A1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ ДВИГАТЕЛЬНОГО СТЕРЕОТИПА ФИЗИЧЕСКОГО УПРАЖНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2546421C1 |
| Способ тренировки мышц по методу Савельева Б.С. | 1990 |
|
SU1797494A3 |
| Способ определения функционального состояния пилота и система для его осуществления | 2017 |
|
RU2654765C1 |
| УСТРОЙСТВО И СПОСОБ ПОЛИФУНКЦИОНАЛЬНОГО МОДЕЛИРОВАНИЯ НЕРВНО-МЫШЕЧНОГО АППАРАТА | 2020 |
|
RU2750015C1 |
| СПОСОБ ПОВЫШЕНИЯ СПОРТИВНЫХ РЕЗУЛЬТАТОВ ЧЕЛОВЕКА ПРИ ПРОВЕДЕНИИ СПОРТИВНЫХ ТРЕНИРОВОК | 2009 |
|
RU2421252C2 |
| Способ комплексной медико-психологической реабилитации пациентов с использованием биологической обратной связи (БОС) в поздний восстановительный период после острого ишемического инсульта | 2021 |
|
RU2772542C1 |
| Устройство для управления двигательными функциями спортсмена в процессе обучения | 1979 |
|
SU786987A1 |
| СПОСОБ ОПТИМИЗАЦИИ БАЛАНСА МЫШЦ ТУЛОВИЩА КОСМОНАВТОВ НА ВТОРОМ ЭТАПЕ ПОСЛЕПОЛЕТНОЙ РЕАБИЛИТАЦИИ С ПОМОЩЬЮ БИОУПРАВЛЯЕМОЙ МЕХАНОТЕРАПИИ | 2023 |
|
RU2807386C1 |
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЬНЫМИ ДЕЙСТВИЯМИ БИОЛОГИЧЕСКОГО ОБЪЕКТА по авт.св. № 711715, о т л ичающа. яся тем, что, с целью сокращения времени обучения и снятий адаптации к стимулир тощим воздействиям, в нее введены последовательно соединенные блок оценки.работоспособности и меры утомления мьшц двигательного аппарата, состоящий из устройства возбуждения мышц и соединенных между собой измерителя характеристик индуцированных ме- . ханических колебаний биомеханического звена и анализатора, а также блок .коррекции режимов работы исполнительных механизмов, выход которого под-, ключен к исполнительным механизмам, при этом-входы блока оценки работоспособности и меры утомления мышц двигательного аппарата соединены с биологическим объектом и вторьм выходом блока измерения биомеханического и медико-биологических параме.тров объекта управления, а выход с четвертым входом внешнего управляО) ющего устройства. со 4 00 4:;
Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления двигательным действием биологического объекта | 1977 |
|
SU711715A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
