Область техники
Изобретения относятся к медицине и эргономике, а именно к способам определения функционального состояния пилота во время полета с многоканальной регистрацией биомеханических сигналов. Изобретения могут быть использованы для оценки параметров функционального состояния и двигательной активности пилота воздушного судна (ВС), контроля рисков, связанных с утомляемостью и неблагоприятными психофизиологическими состояниями пилота (человека-оператора), а также обеспечения исследований в области эргономики и разработки методик диагностики уровня рабочей нагрузки, состояния и прогноза качества профессиональной деятельности (или обучения на тренажере) экипажа ВС, и операторов сложных систем.
В активном эксперименте бесконтактная бортовая система контроля состояния пилота (СКСП) регистрирует многоканальный биологический сигнал, связанный с динамическим процессом распределения веса тела пилота в рабочем кресле, который при отсутствии внешних сил (помимо силы тяжести) обусловлен физиологическими процессами дыхания, сердечной деятельности, непроизвольной двигательной активностью и целенаправленными движениями пилота. Измерение нагрузок, распределенных по поверхности сиденья и спинки кресла, обеспечивается совокупностью датчиков биомеханического сигнала (ДБМС), размер форма и количество которых может варьироваться в зависимости от характеристик кресла, условий эксплуатации и ограничений стоимости системы.
В процессе эксперимента дополнительно к многоканальному биологическому сигналу, который служит источником информации для определения частоты сердечных сокращений, частоты дыхания, вариабельности сердечного ритма (ВСР), интенсивности двигательной активности и других показателей функционального состояния пилота, измеряется вибрационная обстановка в точке установки кресла пилота (виброускорения по трем ортогональным осям), а также пространственное положение и динамика ВС (перегрузка и угловая скорость по трем ортогональным осям в районе центра масс ВС). Эта дополнительная информация служит для устранения динамических помех в сигнале, которые связанны с внешней вибрацией, турбулентностью атмосферы и маневрированием ВС.
Система СКСП является бесконтактной (отсутствует необходимость размещения в штатном режиме работы измерительной аппаратуры на теле пилота и его экипировке, система не нагружает экипаж дополнительными задачами и не меняет привычный порядок действий в кабине при пилотировании), автономной (подготовка к измерениям и сбор данных проходят в автоматическом режиме, и не требуют присутствия на борту дополнительного оператора).
При анализе текущих значений показателей психофизиологического состояния пилотов используется база данных индивидуальной и групповой статистики биологических сигналов по всем ранее проведенным экспериментам с использованием ретроспективного анализа.
Изобретения относятся к элементам системы управления рисками, связанными с утомляемостью, основные требования к которой представлены в международных нормативно-технических документах:
- ICAO. Annex 6 to the Convention on International Civil Aviation - Operation of Aircraft. Part I - International Commercial Air Transport - Aeroplanes. Amendment 38 (applicable 13/11/14);
- ICAO. Annex 19 to the Convention on International Civil Aviation - Safety Management. First Edition (applicable 14/11/13);
- ICAO. Fatigue Risk Management Systems. Manual for Regulators. (Doc 9966) 1st edition. January 2012;
- ICAO. IATA. IFALPA. Fatigue Risk Management Systems. Implementation Guide for Operators, 1st edition. July 2011;
Предлагаемые изобретения при помощи ретроспективного анализа накопленной статистики показателей психофизиологического состояния пилота позволяет выявлять предпосылки к возникновению неблагоприятных состояний, связанных с утомлением и пониженным уровнем функциональных резервов пилота (человека-оператора), и может использоваться в качестве средства повышения безопасность полетов.
Уровень техники
Известен «Способ определения функционального состояния оператора», патент RU №2112423, опубл. 10.06.1998 г., осуществляемый с помощью устройства, включающего платформу, собранную из двух жестких параллельных плит, между которыми расположены упругие опорные элементы с наклеенными на них тензометрическими датчиками системы первичных тензометрических преобразователей. Платформа устанавливается на сиденье рабочего кресла с упругой прокладкой на верхней поверхности для обеспечения комфортного размещения пилота. Измеряются текущие вертикальные нагрузки в упругих опорных элементах платформы, и на их основе рассчитываются смещения центра давления и изменения силы давления тела оператора на платформу.
Источником информации о вертикальных нагрузках в опорных элементах являются первичные тензометрические преобразователи, собранные на основе дифференциальных усилителей в мостовую схему, связанную с аналоговой электронной системой выделения, фильтрации и нормирования физиологических сигналов и двигательной активности. Выход этой системы связан с устройством согласования и через устройство центрирования со вторым ее входом (входом обратной связи), а устройство согласования связано с системой обработки и регистрации на ЭВМ через аналогово-цифровой преобразователь.
После обработки на ЭВМ сигналы дыхания и пульса, выделенные с помощью фильтрации в диапазоне частот 0,5-30 Гц и усиления с коэффициентом усиления 64-128 совместно с параметрами двигательной активности, выделенными с помощью фильтрации в диапазоне частот до 0,5 Гц, позволяют оценить напряженность и специфические признаки работы оператора, характерные для данной профессиональной деятельности. Специфическими признаками работы оператора являются максимальные и средние за выбранный период времени амплитуды и фазы смещения центра давления тела оператора на сиденье, промежутки времени между периодами активности, скорость изменения фаз и амплитуд смещения. Однако при испытании не предусмотрено измерение перегрузки и вибрации по трем ортогональным осям в месте установки кресла пилота, а также перегрузки и угловой скорости по трем ортогональным осям в центре масс ВС, которые влияют на полезный сигнал и снижают достоверность результатов диагностирования состояния пилота во время полета (не учитываются динамические помехи, вызванные внешней вибрацией, турбулентностью атмосферы и маневрированием ВС).
Платформа на сиденье рабочего кресла, выполненная из двух жестких плит, имеет ряд недостатков, основным из которых является невозможность ее установки в рабочее кресло без снижения комфорта размещения пилота (существенно изменяются характеристики сиденья и поза размещения на нем). Еще один недостаток связан с устаревшей конструкцией подсистемы преобразования и передачи сигналов, собранной на основе аналоговых компонентов с большой протяженностью линий передачи сигналов в аналоговом виде (свыше 5 метров для каждого канала) и слабой защитой от внешнего электромагнитного излучения и шумов.
Из RU 2533683 С2, опубл. 20.11.2014, известно устройство дистанционного бесконтактного мониторинга параметров жизнедеятельности живого организма, предназначенного для использования в медицине и/или ветеринарии, в условиях, когда контактная диагностика живого организма затруднительна, опасна или недопустима.
Недостатком устройства является то, что оно содержит, по меньшей мере, один радиопередающий модуль, и, по меньшей мере, один радиоприемный модуль, для работы которых генерируется радиочастотный энергетический сигнал, совместимый для использования с живым объектом. Использование дополнительного радиочастотного сигнала в кабине пилота нежелательно.
Изобретение US 7532964 В2, опубл. 12.05.2009, относится к системе безопасности водителя и к устройству пробуждения водителя путем обнаружения сигнала прогнозируемого для засыпания за рулем в результате мониторинга состояния водителя. В качестве измерительного прибора биосигнала используется пленка пьезоэлектрического элемента в качестве датчика давления, установленного в спинке или подушке сиденья. Устройство пробуждения, стимулирующее ощущение давления на водителя, располагается в спинке сиденья.
Изобретение US 8469884 В2, опубл. 25.06.2013, позволяет проводить мониторинг в режиме реального времени с центральной станции (например, клиники) медицинского состояния пациента, располагающегося в кресле, которое включает в себя датчики для измерения температуры пациента, кровяного давления и тому подобному. Обмен данными происходит за счет двухсторонней аудио- и видеосвязи.
Для проведения активного эксперимента по патентам US 7532964 В2 и US 8469884 В2, необходимо вмешательство в конструкцию штатного кресла пилота, что существенно повышает сложность и стоимость проведения экспериментов. Тип используемых датчиков не позволяет получить надежный полезный сигнал в летной эксплуатации.
Известно также устройство (US 8262582 В2, опубл. 11.09.2012) бесконтактного мониторинга кардиореспираторного сигнала тела пациента, получаемого с помощью многоканального датчика давления, который может быть встроен, например, в матрас кровати или на сиденье. Многоканальный датчик давления выполнен в виде листа, включает в себя электроды из фольги, которые располагаются в виде матрицы. Однако устройство не содержит элементов, которые в процессе эксперимента контролировали бы перегрузку, вибрационную обстановку в зоне установки кресла. Также устройство имеет потенциально более высокий уровень погрешностей из-за типа используемого датчика и подвержено повышенному влиянию электромагнитных помех, что нежелательно при летной эксплуатации.
Известна система, обеспечивающая сбор информации о состоянии здоровья оператора по результатам измерений биомеханических сигналов с датчиков, их преобразования и выдачи рекомендаций пользователям, патент (WO 2016/046718 A1, G08C 17/00, опубл. 31.03.2016). Блоки датчиков могут находиться в кресле оператора, на полу под ногами, на столе. Обработка сигналов датчиков позволяет, к примеру, рассчитать вариабельность сердечного ритма, который ассоциируется с личным здоровьем сердца оператора, с его уровнем стресса и уровнем лишения сна. Недостатком системы управления является то, что она ориентирована на стационарные объекты, и плохо приспособлена к летной эксплуатации из-за сложности интеграции большого количества специфической медицинской измерительной аппаратуры в комплекс оборудования в кабине современного воздушного судна (ВС).
Известно «PRESSURE-SENSSING DEVICE WITH BIPLANAR SENSOR ARRAY», заявка на изобретение US 2014/0107532 A1, опубл. 04.17, 2014 г., датчики для измерения биомеханических сигналов, последовательно связанных с устройствами сбора, преобразования и регистрации информации, форма каждого датчика в плане - шестигранник, датчики давления размещены на опорной поверхности равномерно с минимальными зазорами, равномерно. Однако недостатком устройства является то, что датчики давления ограничены двумя состояниями (датчик определяет: превышает ли вертикальная нагрузка пороговое значение или не превышает), что, в свою очередь, не позволяет оценивать характеристики биомеханического сигнала с достаточной точностью.
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в повышении достоверности, надежности и технологичности определения характеристик биомеханических сигналов тела пилота (человека-оператора сложной системы) за счет использования бесконтактного способа измерений, пригодного для диагностирования функционального состояния членов экипажа ВС в условиях летной эксплуатации, применения технологичной многоканальной системы прецизионных датчиков, распределенных по поверхности кресла, повышения общей чувствительности измерительной системы и снижения уровня помех для более точного и надежного измерения параметров колебаний, вызываемых целенаправленной двигательной активностью и непроизвольной биомеханикой тела пилота, в том числе его дыханием и сердечной деятельностью.
Существенные признаки
Для получения указанного технического результата в предлагаемом способе определения функционального состояния пилота на сиденье в кресле, оснащенном измерительной системой, чувствительной к изменению вертикальной нагрузки и центра давления тела пилота на сиденье, включающем измерение и запись по времени колебаний давления тела пилота на сиденье кресла, обработку записи на ЭВМ после фильтрации сигналов с вычислением частоты сердечных сокращений, частоты дыхания оператора, интенсивности двигательной активности, используются многоканальные измерения при помощи массива плоских пьезокерамических датчиков, покрывающих не только сиденье, но и спинку кресла пилота; дополнительно используя компактную инерциальную систему (ИНС), служащую источником информации о пространственном положении воздушного судна (ВС), перегрузке и угловой скорости по трем ортогональным осям, устанавливают вблизи центра масс ВС для обеспечения максимальной устойчивости функционирования ИНС, или в любой другой точке ВС, подходящей по эксплуатационным параметрам, также используя компактный трехкомпонентный акселерометр измеряют перегрузки и виброускорения по трем ортогональным осям вблизи кресла пилота, при этом информация от ИНС и акселерометра служит для контроля и устранения динамических помех, связанных с внешней вибрацией, турбулентностью атмосферы и маневрированием ВС, биологический многоканальный сигнал, корректирующие сигналы инерциальной системы и акселерометра передаются на регистрацию по экранированным цифровым линиям в защищенный от механических и электромагнитных воздействий твердотельный накопитель, обеспечивая сбор и синхронизацию информации от датчиков биомеханических сигналов (ДБМС), ИНС, акселерометра и формирования единого информационного потока для последующего накопления и обработки, при этом первичная обработка включает фильтрацию данных на уровне микроконтроллеров ДБМС, ИНС и акселерометра;
декомпозицию (разложение) сигнала ДБМС на частотные полосы осуществляют в соответствии с частотным составом корректирующих сигналов ИНС и акселерометра, декомпозиция выполняется при помощи методов частотно-временного анализа (непрерывного и дискретного вейвлет-анализа, а также оконного преобразования Фурье для контроля результатов); с помощью применения методов корреляционного анализа выявляют связи между динамическими помехами (по информации ИНС и акселерометра) и соответствующими артефактами в полезном сигнале, на основе выявленной связи на каждом участке сигнала ДБМС производится устранение артефактов от динамических помех во всех частотных полосах; обработка данных ведется либо в режиме реального времени, либо после полета;
перед испытанием (один раз при подготовке измерений показателей нового пилота), используя вспомогательные компактные ИНС, установленные на теле пилота, проводят технологическую предварительную калибровку системы датчиков ДБМС в наземных условиях при неподвижном ВС, для этого сопоставляют сигналы датчиков в кресле пилота с синхронными с ними сигналами угловых скоростей и ускорений торса, головы и конечностей пилота; при воспроизведении тестовых движений, сигналы угловых скоростей и ускорений формируются вспомогательными ИНС, размещаемыми на теле пилота только на этапе первичной калибровки системы;
конструкция и способ подключения к системе контроля состояния пилота (СКСП) вспомогательных ИНС идентичны основной ИНС, используемой для контроля динамических помех;
во время или после полета осуществляют восстановление полезного сигнала и анализируют его методами, используемыми в психофизиологии и авиационно-космической медицине (выделяются сигналы вариабельности сердечного ритма, дыхательного процесса и показателей двигательной активности пилота).
Для достижения названного технического результата предлагаемая бесконтактная бортовая система контроля состояния пилота (СКСП), в отличие от известного устройства, датчики биомеханических сигналов (ДБМС) выполнены из жестких пластин, оснащены микроконтроллерами и конструктивно объединены текстильной основой в единую плоскую структуру, интегрированную в чехол, расположены на сиденье кресла пилота и на спинке рабочего кресла пилота. Каждый датчик выполнен в виде пластины, собранной из верхнего и нижнего силового элемента (основания и крышки), между ними смонтирована печатная плата с разъемом. Узел чувствительного элемента (УЧЭ), преобразующий механические воздействия от тела пилота на чувствительный элемент (ЧЭ), выполнен в виде пьезокерамического кольца, укрепленного на основании и выполненного с возможностью нормализовать электрический заряд, возникший на поверхности ЧЭ через упор и опору, и преобразовывать его в двоичный код. Чашка и вкладыш ЧЭ фиксируются строго по центру основания, обеспечивая усилие, с которым участок тела пилота воздействует на ЧЭ, через упор и опору, приводя к возникновению электрического заряда на поверхности ЧЭ.
Опора и вкладыш изготовлены из жесткого материала, что позволило добиться высокого соотношения сигнал-шум при выполнении требований при обработке к чистоте поверхности.
Шестигранная форма каждого датчика в плане с крепежными элементами в углах позволяет создать при сборке равномерный натяг на пьезокерамическом кольце для повышения стабильности характеристик ДБМС, в измерительном канале датчика ДБМС использованы два операционных усилителя (ОУ), включенных по дифференциальной схеме с общей нулевой точкой, дифференциальные входы подачи сигнала обеспечивают максимальный уровень сигнала, а также снижение влияния внешних помех и наводок при малых напряжениях питания.
Для измерения перегрузки по 3-м ортогональным осям, вблизи кресла пилота установлен модуль измерения перегрузок (МИП), включающий микросхему цифрового акселерометра; вблизи центра масс ВС установлена компактная инерциальная система - устройство измерения параметров пространственного положения самолета (УПС), выполненного на инерциальном датчике ИНС с шестью степенями свободы. Датчики биомеханических сигналов ДБМС (1-16) посредством интерфейса SPI связаны с входом модуля сбора биомеханических сигналов и формирования информационного кадра (МСБС), через полнодуплексный интерфейс RS-485 модули МСБС, МИП и устройство УПС связаны параллельными каналами RS-485 с входами модуля сбора, преобразования и синхронизации измерительной информации (МСПИИ), с возможностью формирования их в единый цифровой поток. Выходы по полнодуплексному интерфейсу RS-485 связаны с модулем управления и сбора (МУС) и по интерфейсу ETHERNET со средством обработки информации. В качестве базового интерфейса в системе СКСП применен RS-485, который позволяет поддерживать устойчивую связь между измерительными модулями на расстоянии более 1000 м, что дает возможность разнести измерительные модули практически на любые расстояния в пределах ВС. Для регистрации единого измерительного цифрового потока, сформированного модулем МСПИИ, используют модуль управления и сбора МУС с твердотельным накопителем.
Специальное программное обеспечение (СПО) аппаратной части системы СКСП предназначено для обеспечения управления всеми составными элементами (датчиками, модулями и устройствами) системы, конфигурирования системы СКСП как по составу, так и по задаваемым параметрам элементов, контроля работоспособности, организации информационных кадров и единого информационного потока, выдачи его на устройства регистрации и обработки, а также управления регистрацией.
Кроме того, на каждом ОУ реализован усилитель заряда (УЗ), обеспечивающий выдачу электрического сигнала, пропорционального поступающему на их вход заряду и позволяющий исключить из расчета длину проводов, УЗ не усиливают электрический заряд, а преобразовывают его в напряжение, элементная база УЗ рассчитана на нижний предел частотного диапазона 0,1 Гц, в корпус каждого датчика вмонтирована электронная плата с микросхемой, являющейся высококачественным аналого-цифровым преобразователем (АЦП) последовательного приближения с избыточной дискретизацией и с цифровой фильтрацией выходного сигнала, выходы АЦП каждого датчика последовательно подсоединены к одной линии цифрового интерфейса SPI.
Предлагаемые изобретения иллюстрируются чертежами, на которых изображены:
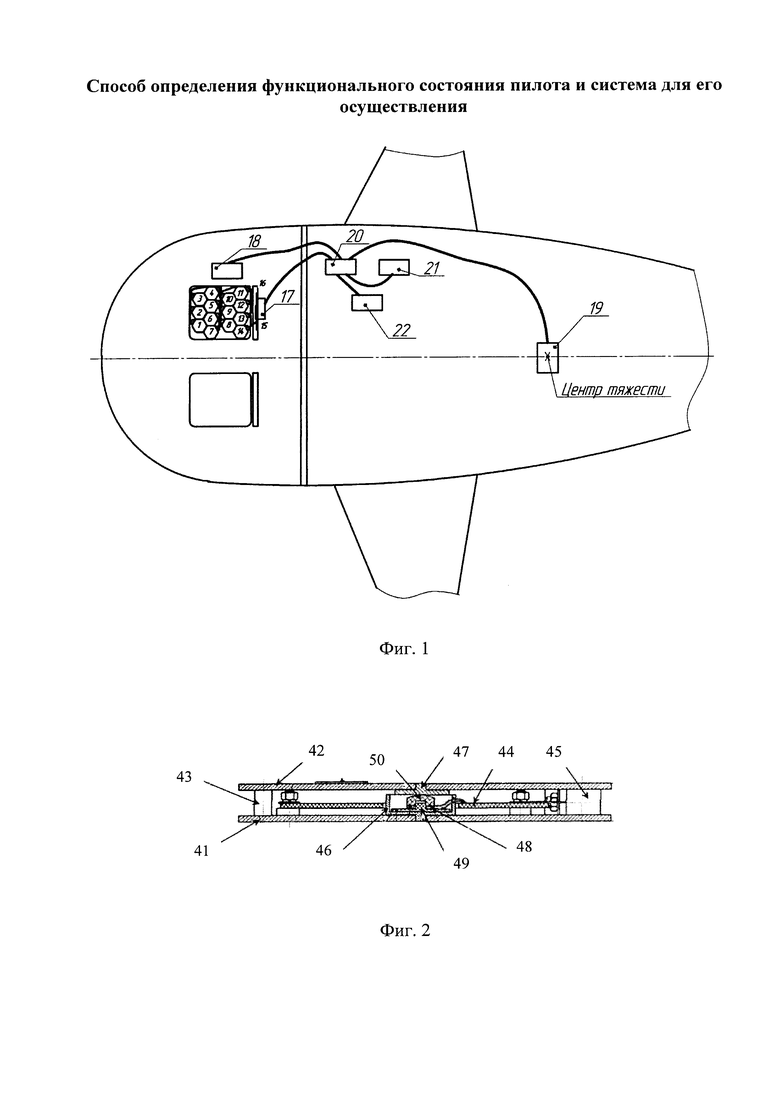
на Фиг. 1 изображена структурная схема системы СКСП, расположенной на летательном аппарате;
на Фиг. 2 изображен поперечный разрез датчика ДБМС;
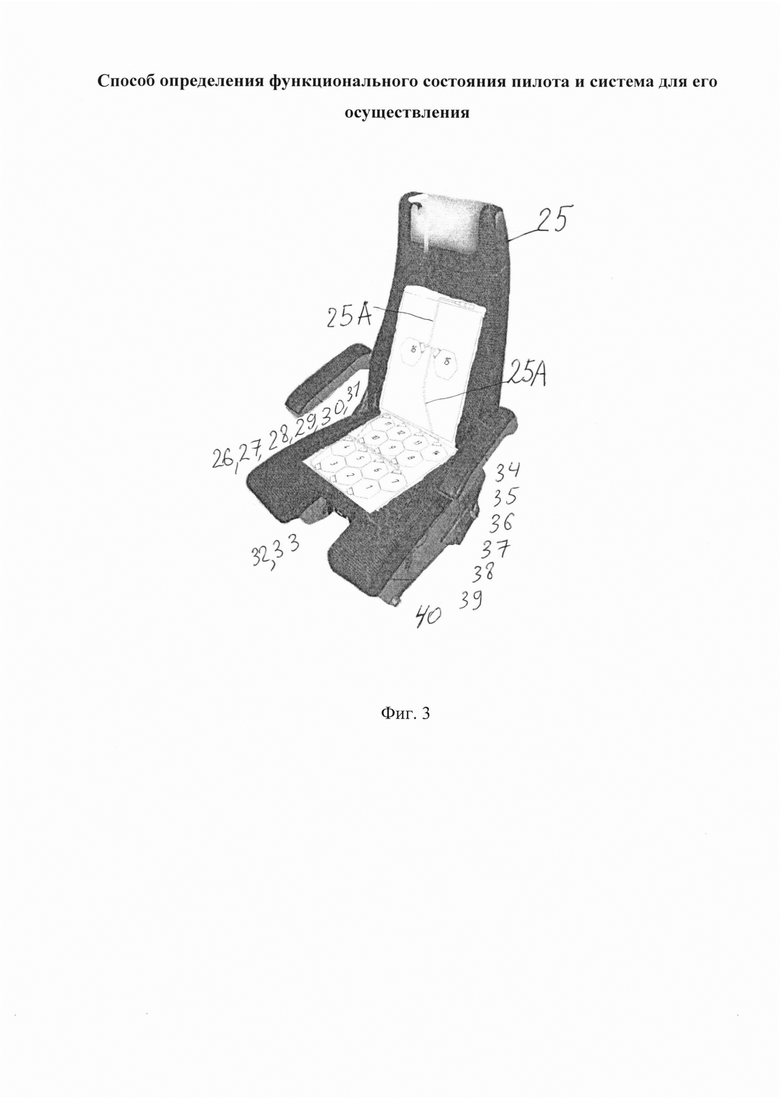
на Фиг. 3 изображена схема расположения датчиков ДБМС в кресле пилота;
на Фиг. 4 - горизонтальный профиль испытательного полета;
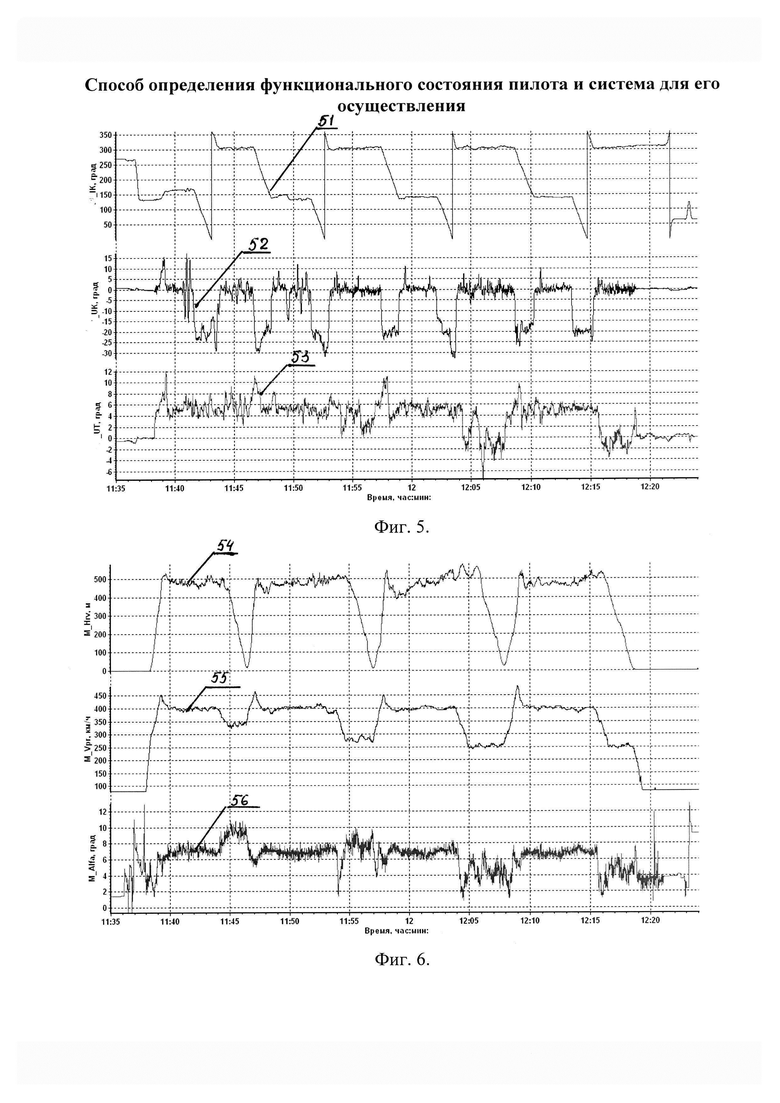
на Фиг. 5 - истинный курс, угол крена, угол тангажа в процессе выполнения испытательного полета;
на Фиг. 6 - высота, приборная скорость, угол атаки в процессе выполнения испытательного полета;
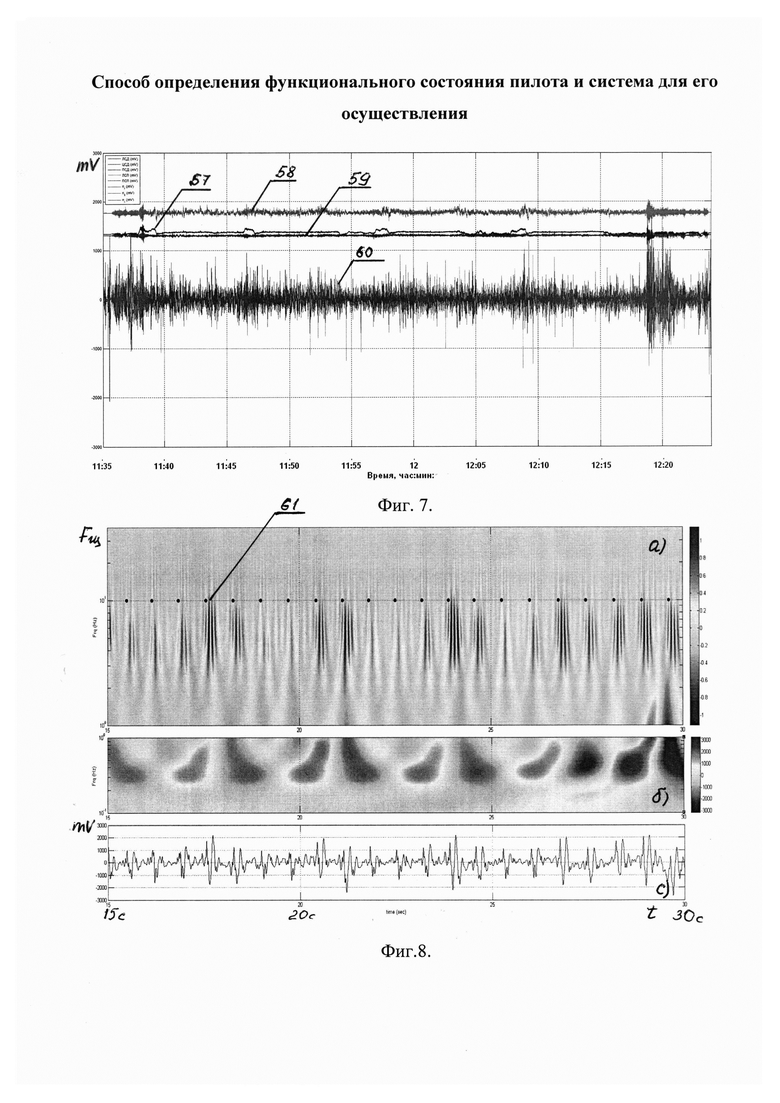
на Фиг. 7 - сигнал от датчиков ДБМС и контрольно-корректирующего акселерометра ускорений nx ny nz в левом кресле пилота в процессе выполнения испытательного полета, измеренных по осям x, y, z;
на Фиг. 8 а, б, с - график сейсмограммы импульсов сокращения сердечной мышцы и пример анализа участка зашумленного сигнала ДБМС при помощи вейвлета Гаусса 4-го порядка: а) сокращение сердечной мышцы; б) циклы дыхания; с) 15-секундный фрагмент графика сигнала датчиков ДБМС (60) с Фиг. 7.
На Фиг. 1 изображена структурная схема системы СКСП, содержащая датчики биомеханических сигналов ДБМС (1-16), которые посредством интерфейса SPI связаны с входом модуля формирования информационного кадра (МСБС) (17); модуль обеспечения измерения перегрузок (МИП) (18) с помощью датчика, в качестве которого применена микросхема цифрового акселерометра для измерения перегрузки по 3-м ортогональным осям, установленным на месте установки кресла пилота, и формирования кадра измерительных данных; устройство измерения параметров пространственного положения самолета (УПС) (19). Через полнодуплексный интерфейс RS-485 модули МСБС (17), МИП (18) и устройство УПС (19) связаны параллельными каналами RS-485 (23) с входами модуля сбора, преобразования и синхронизации измерительной информации (МСПИИ) (20). Выходы по полнодуплексному интерфейсу RS-485 связаны с модулем управления и сбора (МУС) (21) и по интерфейсу ETHERNET (24) со средством обработки информации на персональном компьютере, устройством обработки измерительной информации УОИИ (22), обеспечивающие двусторонний обмен данными модуля МСПИИ (20) с модулем МСБС (17), модулем МИП (18) и устройство УПС (19).
На Фиг. 2 изображен поперечный разрез датчика ДБМС; датчик ДБМС выполнен с основанием (41) и крышкой (42), между ними смонтирована печатная плата (44) с разъемом, узел чувствительного элемента (УЧЭ), преобразующий механические воздействия от тела пилота на чувствительный элемент, выполнен в виде пьезокерамического кольца (48), укрепленного на основании (41) и выполненного с возможностью нормализовать электрический заряд, возникший на поверхности ЧЭ через упор (47) и опору (50), и преобразовывать его в двоичный код, чашка (46) и вкладыш (49) фиксируют ЧЭ по центру основания (41), а опора (50) и вкладыш (49) изготовлены из полиоксиметилена. Форма каждого датчика в плане шестигранная, что позволяет создать при сборке равномерный натяг на пьезокерамическом кольце (для повышения стабильности характеристик ДБМС) и упрощает задачу компоновки многоканальной измерительной системы, обеспечивая равномерное покрытие площади кресла пилота. Датчики установлены в кресле с минимальными зазорами, обеспечивая равномерную жесткость опоры, стабильность соотношения сигнал-шум измеряемых сигналов и устойчивость к влиянию помех.
На Фиг. 3 показано расположение датчиков ДБМС (1-16) в кресле пилота (25), регистрационные каналы 26-40, регканалы спинки кресла 25А.
Предлагаемый способ осуществляют в следующей последовательности.
Система СКСП обеспечивает выполнение следующих функций.
Сбор и синхронизацию информации от датчиков ДБМС, ИНС, акселерометра и формирование единого информационного потока, пригодного для последующего накопления и обработки, для этого проводят первичную обработку, включающую фильтрацию данных на уровне микроконтроллеров датчиков ДБМС, ИНС и акселерометра, декомпозицию (разложение) сигнала ДБМС на частотные полосы в соответствии с частотным составом корректирующих сигналов ИНС и акселерометра, декомпозицию выполняют при помощи методов частотно-временного анализа (вейвлет-анализа).
Применяя метод корреляционного анализа, выявляют связи между динамическими помехами (по информации ИНС и акселерометра) и соответствующими артефактами в полезном сигнале. На основе выявленной связи на каждом участке сигнала ДБМС производится устранение артефактов от динамических помех во всех частотных полосах.
Перед испытанием (один раз при подготовке измерений показателей нового пилота), используя вспомогательные компактные ИНС, установленные на теле пилота, проводят технологическую предварительную калибровку системы датчиков ДБМС в наземных условиях при неподвижном ВС, для этого сопоставляют сигналы датчиков в кресле пилота с синхронными с ними сигналами угловых скоростей и ускорений торса, головы и конечностей пилота.
При воспроизведении тестовых движений, сигналы угловых скоростей и ускорений формируются вспомогательными ИНС, размещаемыми на теле пилота только на этапе первичной калибровки системы.
Конструкция и способ подключения к системе контроля состояния пилота (СКСП) вспомогательных ИНС идентичны основной ИНС, используемой для контроля динамических помех.
Восстановление полезного сигнала и его анализ осуществляют методами, используемыми в психофизиологии и авиационно-космической медицине (выделяются сигналы вариабельности сердечного ритма, дыхательного процесса и показателей двигательной активности пилота).
Система работает следующим образом.
Массив датчиков ДБМС воспринимает изменение вертикальной нагрузки на поверхность кресла от тела пилота, каждый в своей локальной зоне. Основным опорным жестким элементом тела человека при сидячей позе является тазовая кость. Она распределяет на опорную поверхность большую часть суммарной нагрузки, приходящей от торса и нижних конечностей. Все биомеханические процессы, связанные как с физиологией, так и двигательной активностью будут находить свое отражение в силах и моментах, действующих на этот узловой элемент опорно-двигательной системы. Таз и крестцовый отдел спины находится в плотном контакте с сиденьем и нижней частью спинки кресла, именно в этих опорных зонах размещаются датчики ДБМС.
Первичный преобразователь сигнала - датчик ДБМС обладает высокой чувствительностью, низким уровнем собственных шумов и достаточным частотным диапазоном, в том числе в области низких частот. Для уменьшения влияния внешних и внутренних помех в датчик вмонтирована электронная плата, обеспечивающая нормализацию сигнала и преобразование его в двоичный код и выдачу его по интерфейсу SPI в канал связи с модулем МСБС (17). Между основанием (41) и крышкой (42) монтируются печатная плата (44) с разъемом (45). Узел чувствительного элемента (УЧЭ) (46-50) крепится на основании (41). УЧЭ преобразует механические воздействия от тела пилота на чувствительный элемент (ЧЭ), выполненный в виде пьезокерамического кольца (48), в электрический сигнал, который нормализуется и преобразуется в двоичный код высокого разрешения по частоте и уровню. Чашка (46) и вкладыш (49) фиксируют ЧЭ строго по центру основания. Усилие, с которым участок тела пилота воздействует на ЧЭ, через упор (47) и опору (50) приводит к возникновению электрического заряда на поверхности ЧЭ.
В измерительном канале датчика ДБМС-01М использованы два операционных усилителя (ОУ) включенных по дифференциальной схеме с общей нулевой точкой 2,5 В. Дифференциальные входы подачи сигнала обеспечивают максимальный уровень сигнала, а также снижения влияния внешних помех и наводок при малых напряжениях питания. Диапазон изменения выходного напряжения на выходе ОУ от 0 В до 5 В. На каждом ОУ реализован усилитель заряда (УЗ). УЗ отдают электрический сигнал, пропорциональный поступающему на их вход заряду и позволяют исключить из расчета длину проводов. УЗ не усиливают электрический заряд, а преобразовывают его в напряжение. Элементная база УЗ рассчитана на нижний предел частотного диапазона 0,1 Гц. В корпус каждого датчика вмонтирована электронная плата с микросхемой 24-разрядного микроконтроллера AD7766, являющаяся высококачественным аналого-цифровым преобразователем (АЦП) последовательного приближения с избыточной дискретизацией и с цифровой фильтрацией выходного сигнала. Выходы АЦП каждого датчика последовательно подсоединены к одной линии цифрового интерфейса SPI.
Модуль сбора биомеханических сигналов МСБС (17) принимает преобразованные измерительные данные по интерфейсу SPI от датчиков ДБМС, формирует информационный кадр и выдает его по полнодуплексному интерфейсу RS-485 в модуль МСПИИ (20).
Модуль МИП (18) обеспечивает измерение перегрузок по 3-м ортогональным осям в точке установки кресла пилота для оценки их влияния на состояние пилота, а также формирует кадр измерительных данных и выдает его по полнодуплексному интерфейсу RS-485 (23) в модуль МСПИИ (20). В модуле МИП (18) в качестве датчика измерения перегрузок применена микросхема цифрового акселерометра LIS302DL фирмы STMicroelectronics.
Выходные данные устройства УПС (19) предназначены для оценки влияния параметров пространственного положения самолета на состояние пилота в ходе полета. Устройство УПС обеспечивает измерение, формирование кадра измерительных данных и выдает его по полнодуплексному интерфейсу RS-485 в модуль МСПИИ (20).
Устройство согласования выполнено в виде модуля сбора и преобразования измерительной информации МСПИИ (20), который принимает от модулей МСБС (17) и МИП (18), а также от устройства УПС (19) измерительные потоки одновременно по трем параллельным каналам RS-485 (23), формирует их в единый цифровой поток и выдачи по полудуплексному интерфейсу RS-485 на регистрацию или по интерфейсу ETHERNET (24) на средства обработки информации (22). Двусторонний обмен данными модуля МСПИИ (20) с модулем МСБС (17), модулем МИП (18) и устройством УПС (19) организован так, что обеспечивается частота опроса каждого измерительного канала 1024 Гц.
Для регистрации единого измерительного цифрового потока, сформированного модулем МСПИИ (20), используют модуль управления и сбора МУС (21) с SD-картой памяти. Модуль МУС (21) функционирует в соответствии с заданием, прописанным в двоичном файле на SD карте памяти. Для обработки последовательного цифрового потока данных от модуля МСПИИ (20) и выдачи оценок состояния пилота, предложено в качестве устройства обработки измерительной информации УОИИ (22) использовать персональный компьютер (ПК) или другое устройство обработки информации.
В качестве базового интерфейса в системе СКСП применен RS-485, который позволяет поддерживать устойчивую связь между измерительными модулями на расстоянии более 1000 м, что дает возможность разнести измерительные модули практически на любые расстояния в пределах ВС.
Каждый из модулей системы СКСП имеет канал связи RS-232 с УОИИ (22). Интерфейс RS-232 выступает в качестве автономного канала для тестирования, конфигурирования и программирования параметров модуля/устройства.
Специальное программное обеспечение (СПО) аппаратной части системы СКСП предназначено для обеспечения управления работой всех составных элементов (датчиков, модулей и устройства) системы, конфигурирования системы как по составу, так и по задаваемым параметрам элементов, контроля работоспособности, организации информационных кадров и единого информационного потока, выдачи его на устройства регистрации и обработки, а также и управления регистрацией.
Пример
На фигурах 4-7 в качестве примера работы СКСП представлены профили режимов и некоторые параметры испытательного полета. Испытательные режимы показаны на Фиг. 5 - истинный курс (51) с интенсивным изменением углов крена (52) и тангажа (53) самолета, на Фиг. 6 - высота (54), приборная скорость (55), угол атаки (56) в процессе полета, выполнявшиеся на малых высотах до 500 метров с выпущенной и убранной механизацией крыла, на Фиг. 7 - сигнал от датчиков ДБМС (60) и сигналы перегрузок nx (57), ny (58), nz (59), измеренных контрольно-корректирующим акселерометром по осям X, Y, Z в кресле пилота. Испытательные режимы предназначены для проверки функционирования системы СКСП и программных модулей обработки и анализа сигнала ДБМС (60) в условиях зашумления от аэродинамической тряски. При этом сбоев программного обеспечения, связанных с ошибочной идентификацией условий измерения биомеханического сигнала ДБМС выявлено не было.
Эффективным инструментом извлечения биологических сигналов кардиореспираторной деятельности тела пилота из физического сигнала датчика ДБМС является метод, основанный на вейвлет-преобразовании, которое трансформирует функцию одной переменной (времени) в набор вейвлет-коэффициентов - функцию двух переменных (масштаба и времени). На Фиг. 8 а, б, с показан пример применения к искаженному биомеханическому сигналу (15-секундному фрагменту графика сигнала датчиков ДБМС (60) с Фиг. 7) непрерывного вейвлет-преобразования.
Коэффициенты преобразования заключают в себе полную информацию об исходном сигнале. Величина, обратная масштабу, характеризует условную «частоту» короткого сканирующего импульса колебаний - вейвлета. Для удобства восприятия, шкала масштабов на Фиг. 8 а, б преобразована в логарифмическую шкалу условных частот по оси ординат. Одновременно изобразить графически на плоскости все коэффициенты можно, представив их в виде поверхности в координатах частота-время.
На графиках Фиг. 8 а, б изображены такие поверхности в виде проекций на плоскости параметров условной частоты и времени, где величина вейвлет-коэффициента в точке отмечается цветом соответствующей интенсивности. Соответствующее цифровое значение цветового уровня коэффициента указано на правой шкале по оси ординат. Применение вейвлет-анализа позволяет выявить в зашумленном ослабленном сигнале некоторые особенности, которые трудно было бы обнаружить методами классического спектрального оценивания. Например, на графике Фиг. 8б, отражающем колебательную активность в диапазоне частот 0.1-1 Гц, отчетливо видны пять циклов дыхания, которые на графике исходного сигнала Фиг. 8с незаметны.
Пример анализа участка зашумленного сигнала ДБМС при помощи вейвлета Гаусса 4-го порядка приведен на чертежах, где на графике Фиг. 8а (диапазон 1-37.5 Гц) показан 21 импульс характерной частотно-временной структуры «рельефа» поверхности коэффициентов, которые на графике сейсмограммы Фиг. 8с хоть и присутствуют, но не выглядят однотипными. Эти импульсы идентифицируются системой СКСП, как сокращения сердечной мышцы (61) и (отмечены черными маркерами на графике Фиг. 8а), и они точно совпадают с отметками сердечных сокращений, зарегистрированными при контрольных испытаниях сертифицированным электрокардиографическим прибором. Вейвлет-коэффициенты представлены в двух отдельных частотных диапазонах, так как более слабая низкочастотная составляющая графика Фиг. 8б нормирована отдельно для более контрастного представления.
Выявленные биологические сигналы кардиореспираторной деятельности и двигательной активности для оценки функционального состояния пилота далее используются в алгоритмах, разработанных исследовательскими группами в Институте медико-биологических проблем РАН под руководством P.M. Баевского и НИИ нейрохирургии имени Н.Н. Бурденко под руководством Максаковой О.А., Лукьянова В.И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регистрации двигательной активности | 2016 |
|
RU2663396C2 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
Группа изобретений относится к медицинской технике и используется для определения функционального состояния пилота во время полета с многоканальной регистрацией биомеханических сигналов. Способ включает размещение пилота в положении сидя в кресле, оснащенном измерительной системой, чувствительной к изменению вертикальной нагрузки и координат центра давления тела пилота на сиденье, включающий измерение и запись по времени колебаний давления тела пилота на сиденье кресла, обработку записи после фильтрации сигналов с вычислением частоты сердечных сокращений, частоты дыхания оператора и интенсивности двигательной активности. Предварительно проводят технологическую калибровку датчиков биомеханических сигналов в наземных условиях при неподвижном воздушном судне, используя вспомогательные инерциальные системы, установленные на теле пилота. Затем сопоставляют сигналы датчиков в кресле пилота с синхронными с ними сигналами угловых скоростей и ускорений торса, головы и конечностей пилота, выполненных при тестовых движениях пилота; осуществляют многоканальные измерения биологического сигнала при помощи массива плоских пьезокерамических датчиков, установленных в сиденье и спинке кресла пилота. Дополнительно в полете с помощью инерциальной системы, установленной вблизи центра масс воздушного судна, получают информацию о его пространственном положении, измеряют с помощью трехкомпонентного акселерометра перегрузки и виброускорения по трем ортогональным осям вблизи кресла пилота, при этом информацию от инерциальной системы и акселерометра используют для контроля и устранения динамических помех. Многоканальные измерения биологического сигнала, сигналы инерциальной системы и акселерометра передают по экранированным цифровым линиям. Осуществляют декомпозицию сигналов датчиков биомеханических сигналов на частотные полосы при помощи частотно-временного анализа. С помощью корреляционного анализа выявляют связи между динамическими помехами и соответствующими артефактами в полезном сигнале, в режиме реального времени или после полета на основе выявленной связи в каждой частотной полосе сигнала датчиков биомеханических сигналов производят устранение артефактов от динамических помех; и осуществляют восстановление и анализ полезного сигнала. Для этого выделяют сигналы вариабельности сердечного ритма, дыхательного процесса и показателей двигательной активности пилота. Раскрыта бортовая система контроля функционального состояния пилота.
Изобретения обеспечивают повышение достоверности, надежности и технологичности определения биомеханических сигналов. 2 н. и 1 з.п. ф-лы, 8 ил.
1. Способ определения функционального состояния пилота воздушного судна, включающий размещение пилота в положении сидя в кресле, оснащенном измерительной системой, чувствительной к изменению вертикальной нагрузки и координат центра давления тела пилота на сиденье, включающий измерение и запись по времени колебаний давления тела пилота на сиденье кресла, обработку записи после фильтрации сигналов с вычислением частоты сердечных сокращений, частоты дыхания оператора и интенсивности двигательной активности, отличающийся тем, что предварительно проводят технологическую калибровку датчиков биомеханических сигналов в наземных условиях при неподвижном воздушном судне, используя вспомогательные инерциальные системы, установленные на теле пилота, затем сопоставляют сигналы датчиков в кресле пилота с синхронными с ними сигналами угловых скоростей и ускорений торса, головы и конечностей пилота, выполненных при тестовых движениях пилота; осуществляют многоканальные измерения биологического сигнала при помощи массива плоских пьезокерамических датчиков, установленных в сиденье и спинке кресла пилота; дополнительно в полете с помощью инерциальной системы, установленной вблизи центра масс воздушного судна, получают информацию о его пространственном положении, измеряют с помощью трехкомпонентного акселерометра перегрузки и виброускорения по трем ортогональным осям вблизи кресла пилота, при этом информацию от инерциальной системы и акселерометра используют для контроля и устранения динамических помех, связанных с внешней вибрацией, турбулентностью атмосферы и маневрированием воздушного судна, многоканальные измерения биологического сигнала, сигналы инерциальной системы и акселерометра передают по экранированным цифровым линиям в защищенный от механических и электромагнитных воздействий твердотельный накопитель, обеспечивая сбор и синхронизацию информации, и формирование единого информационного потока для последующего накопления и обработки, осуществляют декомпозицию сигналов датчиков биомеханических сигналов на частотные полосы при помощи частотно-временного анализа; с помощью корреляционного анализа выявляют связи между динамическими помехами и соответствующими артефактами в полезном сигнале, в режиме реального времени или после полета на основе выявленной связи в каждой частотной полосе сигнала датчиков биомеханических сигналов производят устранение артефактов от динамических помех; и осуществляют восстановление и анализ полезного сигнала, для этого выделяют сигналы вариабельности сердечного ритма, дыхательного процесса и показателей двигательной активности пилота.
2. Бортовая система контроля функционального состояния пилота, содержащая установленные в кресле пилота датчики для измерения биомеханических сигналов, связанные с модулем сбора, преобразования и регистрации информации, при этом датчики выполнены плоскими и имеют форму шестигранника, и размещены на опорной поверхности равномерно, отличающаяся тем, что датчики для измерения биомеханических сигналов оснащены микроконтроллерами аналого-цифрового преобразования и фильтрации, объединены текстильной основой в единую плоскую структуру, интегрированную в чехол, расположены на сиденье и спинке кресла пилота, при этом каждый датчик включает верхний и нижний силовые элементы в виде жестких пластин основания и крышки, между пластинами смонтирована печатная плата с разъемом, и узел чувствительного элемента, преобразующий механические воздействия от тела пилота, который выполнен в виде пьезокерамического кольца, укрепленного на основании, и содержит опору и вкладыш чувствительного элемента, которые изготовлены из жесткого материала и фиксированы по центру основания, крепежные элементы размещены в углах каждого датчика шестигранной формы, измерительный канал каждого датчика биомеханических сигналов содержит два операционных усилителя, включенных по дифференциальной схеме с общей нулевой точкой; в систему дополнительно введен модуль измерения виброускорений и перегрузок для измерения перегрузки по 3-м ортогональным осям, установленный вблизи кресла пилота и включающий микросхему цифрового акселерометра; и инерциальная система для измерения параметров пространственного положения и динамики воздушного судна, установленная вблизи центра масс воздушного судна и выполненная на инерциальном датчике с шестью степенями свободы; при этом модуль сбора, преобразования и синхронизации измерительной информации связан через модуль сбора биомеханических сигналов и формирования информационного кадра посредством интерфейса с датчиками биомеханических сигналов, с модулем измерения перегрузок, устройством пространственного положения воздушного судна, с модулем управления и сбора обработки информации, с входом устройства обработки и регистрации информации.
3. Система по п. 2, отличающаяся тем, что на каждом операционном усилителе реализован усилитель заряда, обеспечивающий выдачу электрического сигнала, пропорционального поступающему на их вход заряду и позволяющий исключить из расчета длину проводов, в корпус каждого датчика биомеханических сигналов вмонтирована электронная плата с микросхемой, представляющая собой аналого-цифровой преобразователь последовательного приближения с избыточной дискретизацией и с цифровой фильтрацией выходного сигнала, а выходы аналого-цифрового преобразователя каждого датчика подсоединены к линии цифрового интерфейса.
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ОПЕРАТОРА | 1995 |
|
RU2112423C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЖИВОГО ОРГАНИЗМА | 2012 |
|
RU2533683C2 |
| ЦИФРОВОЙ БИОМЕТРИЧЕСКИЙ КОМПЛЕКС ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ПИЛОТА ВОЗДУШНОГО СУДНА | 2013 |
|
RU2587724C2 |
| US 7532964 B2, 12.05.2009 | |||
| US 8469884 B2, 25.06.2013 | |||
| US 8262582 B2, 11.09.2012 | |||
| US 2014107532 A1, 04.17.2014 | |||
| Токарный резец | 1924 |
|
SU2016A1 |

