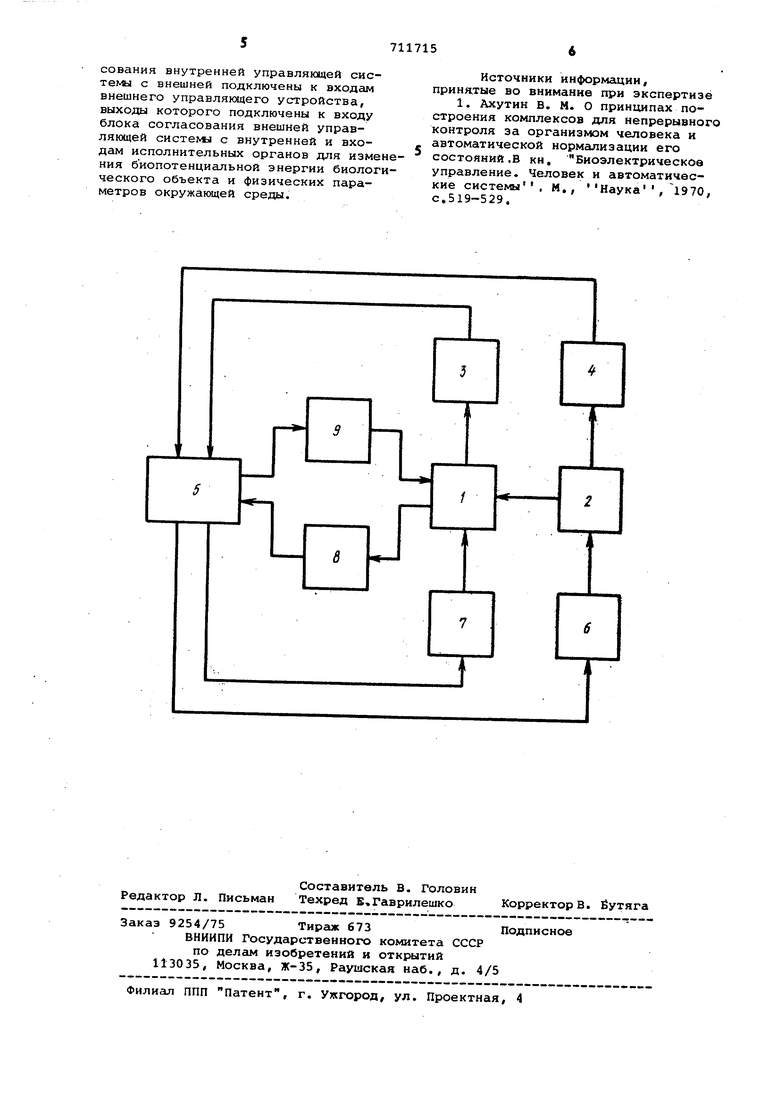
ческих параметров окружающей среды; внешнее управляющее устройство 5; исполнительные органы 6 для изменения физических параметров окружающей среды; исполнительные органы 7 изменения биопотенциальной энергии биологического объекта, блок 8 сог|Ласования внутренней управляющей системы с внешней и блок 9 согласования внешней управляющей системы с внутренней.
С выхода блока 3 измерения элек-. трические сигналы поступают на входы внешнего управляющего устройства 5 , состоящего из ЭВМ, работающей в реальном масштабе времени, например ЭВМ М-6000. Кроме того, электрические сигналы, характеризующие состояние внутренней управляющей системы биомеханического объекта, а с входов блока 8 согласования внутренней управляющей системы с внешней, тких как, например, электромиограф, поступают, на входы внешнего управляющего устройства 5. Внешнее управляющее устройство 5 совершает определенные действия с упомянутой информацией .
Управляющие электрические сигналы с выходов внешнего управляющего устройства 5 поступают на входы исполнительных органов 6, меняющих величины физических параметров окружающе среды, в качестве которых можно использовать, например, электромоторы, нагреватели и насосы, при помощи которых меняют, например температуру, влажность воздуха или такие параметры тренажеров , как жесткость и коэффициент трения; входы исполнительных органов 7 управления изменением биопотенциальной энергии объета управления, в качестве которых можно использовать различные биостимуляторы, например электромиостимулятор, и входы блока 9 согласования внешней управляющей системы с внутренней, например устройств, действующих на .органы чувств биологического объекта 1, таких, как световое табло.
До начала процесса изменения состоянкя биологическим объектом 1 во внешнее управляющее устройство 5 вводятся програмя обработки поступающей в нее информации с блока 3 измерния биомеханических параметров объекта управления, блока 4 измерения физических параметров окружающей среды и nporpaMNbi, регулирующей работу исполнительных органов б, меняющих величины физических параметров окружающей среды, исполнительных органов 7 управления изменением биопотенциальной энергии объекта, блоков 8 и 9 согласования внутренней и внешней управляющей систем.
Отклонение характеристик биомеханическохю состояния объекта 1 управления от заданных для данного процесса значений приводит к автоматическому воздействию, на объект 1 исполнительных органов- 7 управления изменением биопотенциальной энергии объекта блока 9 согласования внешней управляющей систекы с внутренней. Кроме того, данное отклонение приводит в действие исполнительные органы 6, меняющие физические параметры окружающей среды, в соответствии с целями этого процесса изменения биомеханического состояния.
При этом, в зависимости от выбранного режима работы одна из управляющих систем будет являться ведущей, выполняющей основные функции управления, другая - корректирующей, устраняющей неточности управления ведущей системы. ЗСакая система управления биомеханическим объектом позволяет корректировать ошйбки управления ведущей системы, что в частности, дает возможность программировать и поддерживать оптимальней режим двигательных действий спортсмена.
Система управления двигательными действиями биологического объекта позволяет восстанавливать утерянные двигательные функции и формировать новые совокупности функциональных состояний и двигательных структур объекта управления, что, например, в приложении к спортивной практике дает возмох ность интенсифицировать тренировочный процесс и позволяет выполнять спортивные упражнения с рекордными результатами.
Формула изобретения
Система управления двигательными действиями биологического объекта, содержащая блок измерения физических параметров окружающей среды, блок измерения биомеханических и медикобиологических параметров биологического объекта, внешнее управля11цее устройство, исполнительные органы для изменения физических параметров окружающей среды, отличающаяся тем, что, с целью достижения оптимальных двигательных действий и функционального состояния биологического объекта, обладающего внутренней системой управления, в нее введены блоки согласования внутренней управляющей системы с внешней и внешней управляющей системы с внутренней, исполнительные органы для изменения биопотенциа/ ьной энергии биологического объекта, причем выходы блока измерения биомеханических и медико-биологических параметро биологического объекта и блока согласования внутренней управляющей сисTeNJbi с внешней подключены к входам внешнего управляюцего устройства, выходы которого подключены к входу блока согласования внешней управляющей cHCTei j с внутренней и входам исполнительных органов для изменения биопотенциальной энергии биологического объекта и физических параметров окружающей среды.
Источники информащии, принятые во внимание при экспертизе
1. Ахутин В. М. О принципах построения комплексов для непрерывного контроля за организмом человека и автоматической нормализации его состояний.В кн. Биоэлектрическое управление. Человек и автоматические системы , М,, Наука, 1970, с.519-529.