Предметом изобретения является синхронно-следящая система переменного тока.
Известны синхронно-следящие системы переменного тока в которых для выработки напряжений, унравляющих скоростью исполнительного датчика, используются два сельсина: датчик и приемник. Однако обычно в сельсине-приемнике возникают дополнительные напряжения, величина которых зависит от задаваемой скорости. Эти напряжения вызывают динамическую ошибку в процессе слежения.
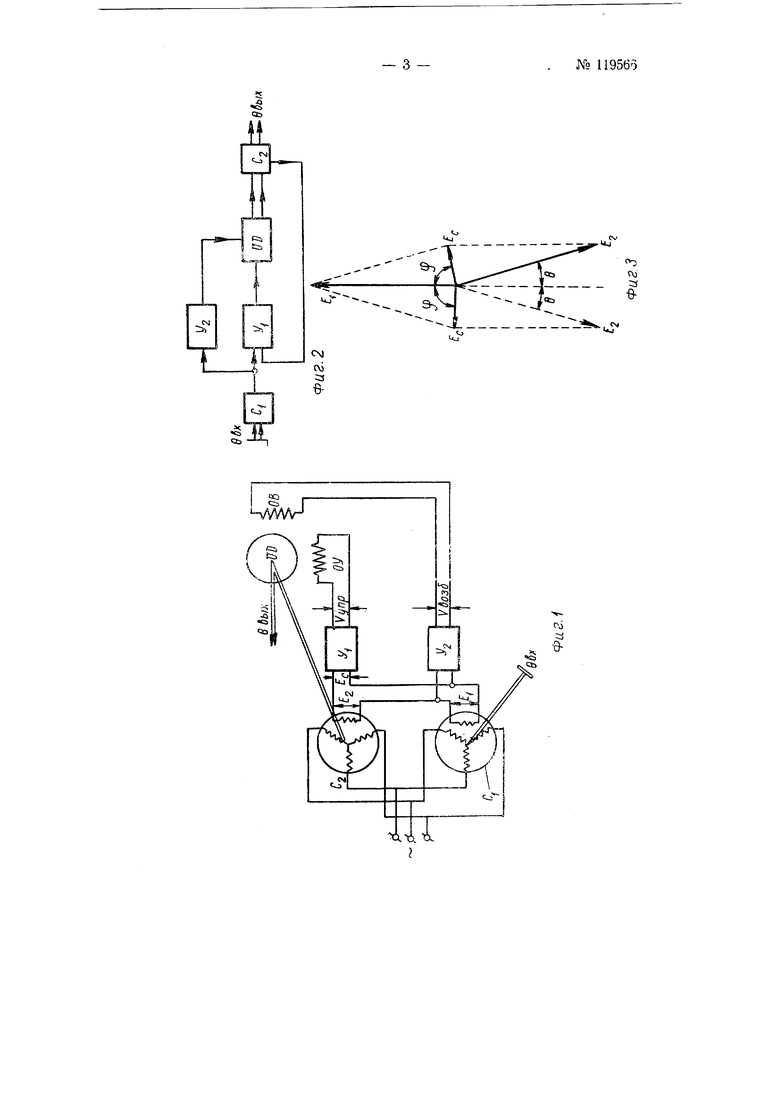
В описываемой системе питание трехфазных распределенных обмоток сельсинов осуществляется трехфазным напряжением, а напряжение рассогласования, снимаемое с последовательно соединенных однофазных обмоток, подается на усилитель мощности, питающий обмотку напряжения двухфазного асинхронного двигателя.
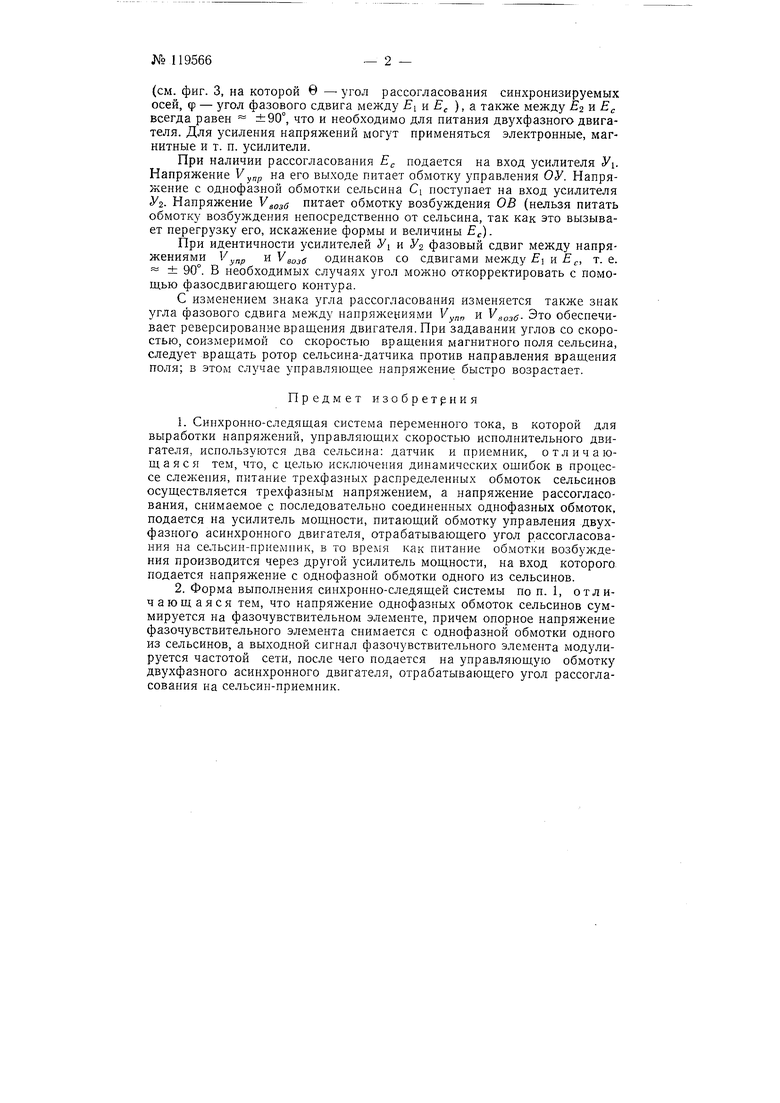
На фиг. 1 изображена схема системы; на фиг. 2 - блок-схема; на фиг. 3 - векторная диаграмма э.д.с. - EI, Е, Е.
Для получения синусоидального напряжения, пропорционального углу рассогласования синхронизируемых осей, трехфазные распределенные обмотки сельсина-датчика С и сельсина-приемника С питаются от сети, а однофазные обмотки соединены параллельно.
При согласовании осей EI и EZ, индуктированные в однофазных обмотках, направлены навстречу друг другу. В приведенном на схеме положении роторы сельсинов рассогласованы на угол 180°. В согласованном положении при 0 равном 0° результирующая Е равна нулю.
Схема соединений обмоток сельсинов обеспечивает получение синусоидального напряжения, амплитуда которого пропорциональна углу рассогласования, а фаза опрокидывается на 180° при изменении знака угла рассогласования. Частота напряжения определяется скоростью и направлением вращения задающего сельсина.
Напряжение используется для амплитудного управления следящим двухфазным асинхронным двигателем ИД. Фазовый сдвиг между EI к Е
№ 119566
(см. фиг. 3, на которой в -угол рассогласования синхронизируемых осей, ф - угол фазового сдвига между i и ,. ), а также между 2 и Е всегда равен ±90°, что и необходимо для питания двухфазного двигателя. Для усиления напряжений могут применяться электронные, магнитные и т. п. усилители.
При наличии рассогласования Е подается на вход усилителя УЬ Напряжение Vу„р на его выходе питает обмотку управления ОУ. Напряжение с однофазной обмотки сельсина Ci поступает на вход усилителя Уг. Напряжение питает обмотку возбуждения ОВ (нельзя питать обмотку возбуждения непосредственно от сельсина, так как это вызывает перегрузку его, искажение формы и величины Е).
При идентичности усилителей «Vi и Уа фазовый сдвиг между напряжениями Vу и Vеозб одинаков со сдвигами между и j-, т. е. ± 90°. В необходимых случаях угол можно откорректировать с помощью фазосдвигающего контура.
С изменением знака угла рассогласования изменяется также знак угла фазового сдвига между напряжениями Vу„„ и Увозв- Это обеспечивает реверсирование вращения двигателя. При задавании углов со скоростью, соизмеримой со скоростью вращения магнитного поля сельсина, следует вращать ротор сельсина-датчика против направления вращения поля; в этом случае управляющее напряжение быстро возрастает.
Предмет изобретения
1.Синхронно-следящая система переменного тока, в которой для выработки напряжений, управляющих скоростью исполнительного двигателя, используются два сельсина: датчик и приемник, отличающаяся тем, что, с целью исключения динамических ошибок в процессе слежения, питание трехфазных распределенных обмоток сельсинов осуществляется трехфазным напряжением, а напряжение рассогласования, снимаемое с последовательно соединенных однофазных обмоток, подается на усилитель мощности, питающий обмотку управления двухфазного асинхронного двигателя, отрабатывающего угол рассогласования на сельсин-приемник, в то время как питание обмотки возбуждения производится через другой усилитель мощности, на вход которого, подается напряжение с однофазной обмотки одного из сельсинов.
2.Форма выполнения синхронно-следящей системы по п. 1, отличающаяся тем, что напрянсение однофазных обмоток сельсинов суммируется на фазочувствительном элементе, причем опорное напряжение фазочувствительного элемента снимается с однофазной обмотки одного из сельсинов, а выходной сигнал фазочувствительного элемента модулируется частотой сети, после чего подается на управляющую обмотку двухфазного асинхронного двигателя, отрабатывающего угол рассогласования на сельсин-приемник.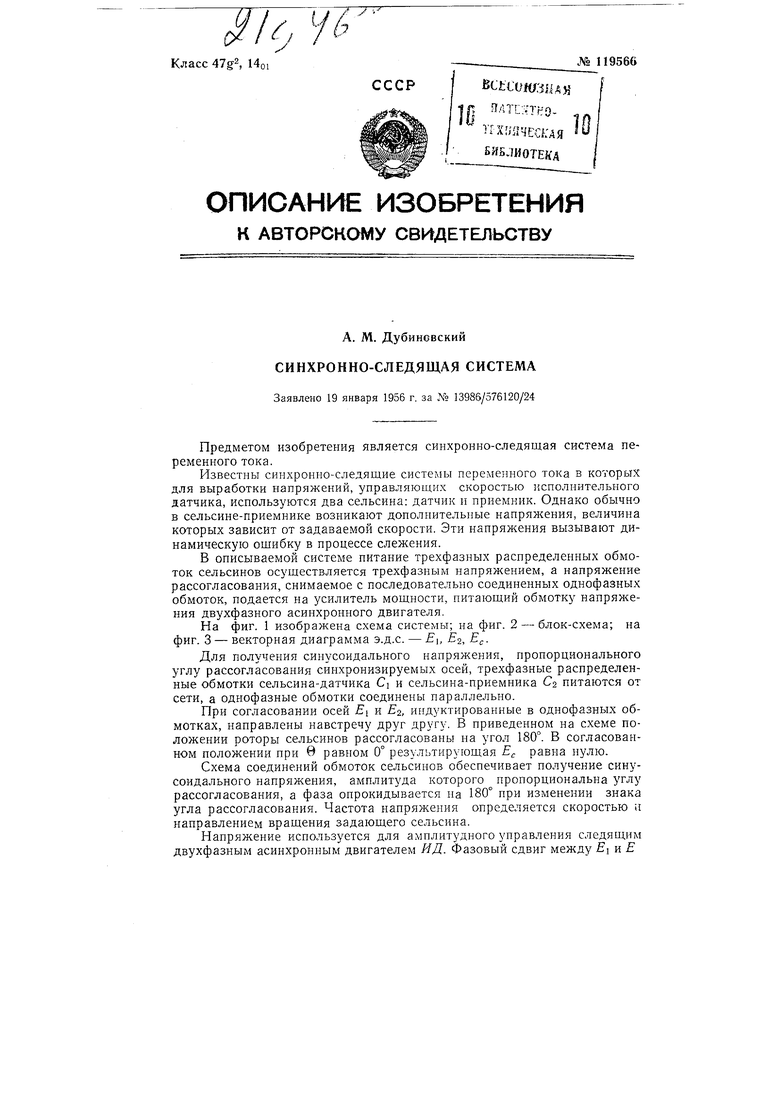
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1977 |
|
SU622044A1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ | 1944 |
|
SU67797A1 |
| СИНХРОННО-СЛЕДЯЩИЙ ПРИВОД | 1943 |
|
SU110213A1 |
| Следящая система | 1979 |
|
SU903803A2 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Система синхронной связи | 1946 |
|
SU69777A2 |
| Следящий электропривод | 1947 |
|
SU74082A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Синхронно-следящий привод | 1948 |
|
SU76737A1 |
| Следящий электропривод с двухфазным исполнительным двигателем | 1957 |
|
SU114017A2 |