Изобретение относится к электротехнике и может быть использовано для систем с неблагоприятньм соотношением постоянных времени электропривода (нескомпенсированная постоянная времени контура регулирования тока 2Ti,T соизмерима с электромехани ческой, постоянной времени Тц) . Сораз мерность этих постоянных времени приводит к недоиспользованию двигатеЛя по току в режимах изменения ско рости, к появлению существенного статизма в контуре тока, который не может быть устранен даже астатическими регуляторами тока. Известны способы управления элзктроприводом постоянного тока, при ко торых уменьшение тока (момента) двигателя в режимах изменения скорости компенсируют действиями регулятора либо обратными связями l. Однако при данных способах не учитывается изменение параметров привода при ослаблении поля двигателя. Использование же обратной связи по ЭДС приводит к появлению дотягивания тока до заданного значения. Известен также способ управления электроприводом постоянного тока с .регулированием уставки ограничения тока в функции величины тока, в котором при токе двигателяj равном нулю, уставку ограничения тока уста навливают большей уровня, соответ-. ствующего максимальному току в стати ческом режиме, и уменьшают ее пропор ционально величине тока двигателя так, чтобы при значении тока, равном его максимальному значению в стати,ческом режиме, она достигала уровня соответствующего этому максимальному значению тока в статическом режиме Z
Недостатком данного способа управления является то, что точность компенсации изменения уровня ограничения максимального тока электродвигателя в динамических режимах зависит от загрузки механизма. Это происходит потому, что изменение уровня зависит .не от тока двигателя, а от его статической составляющей. Кроме того, в режимах торможения загруженного механизма уровень о.граничения максимального тока не увеличивается от величины загрузки, а умень шается, и компенсация этого уровн ограничения в функции тока приво1
I : Целью изобретения является повышение быстродействия электропривода при различной загрузке.
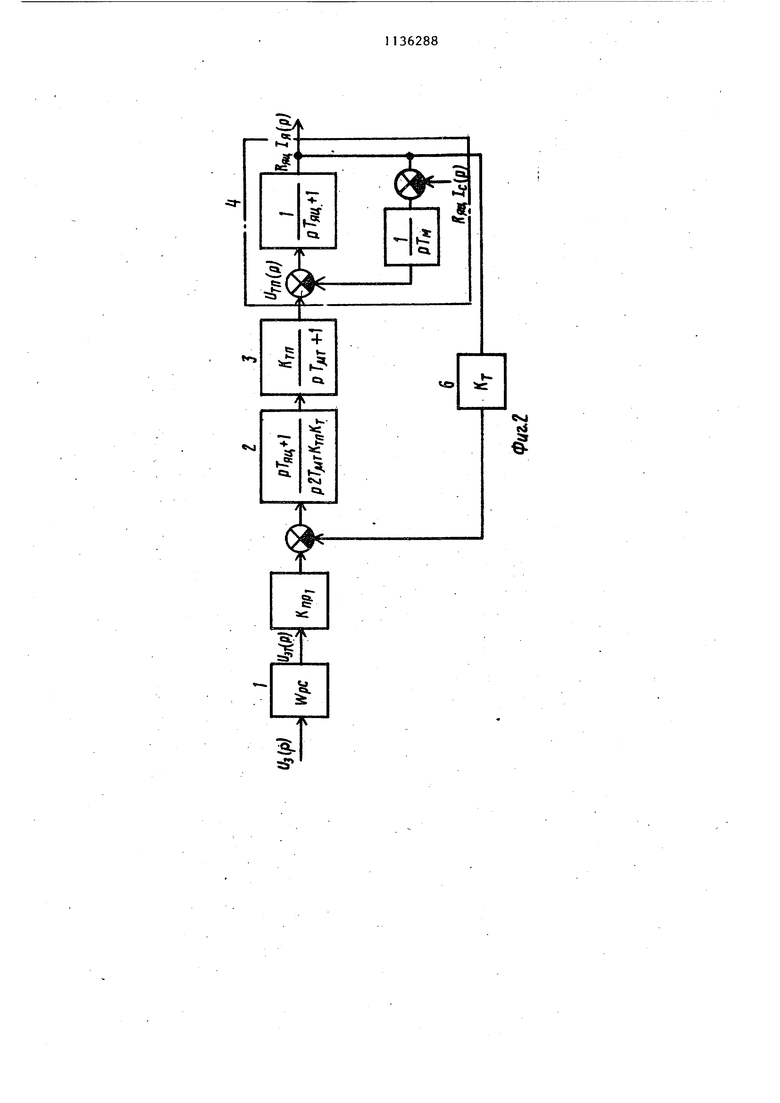
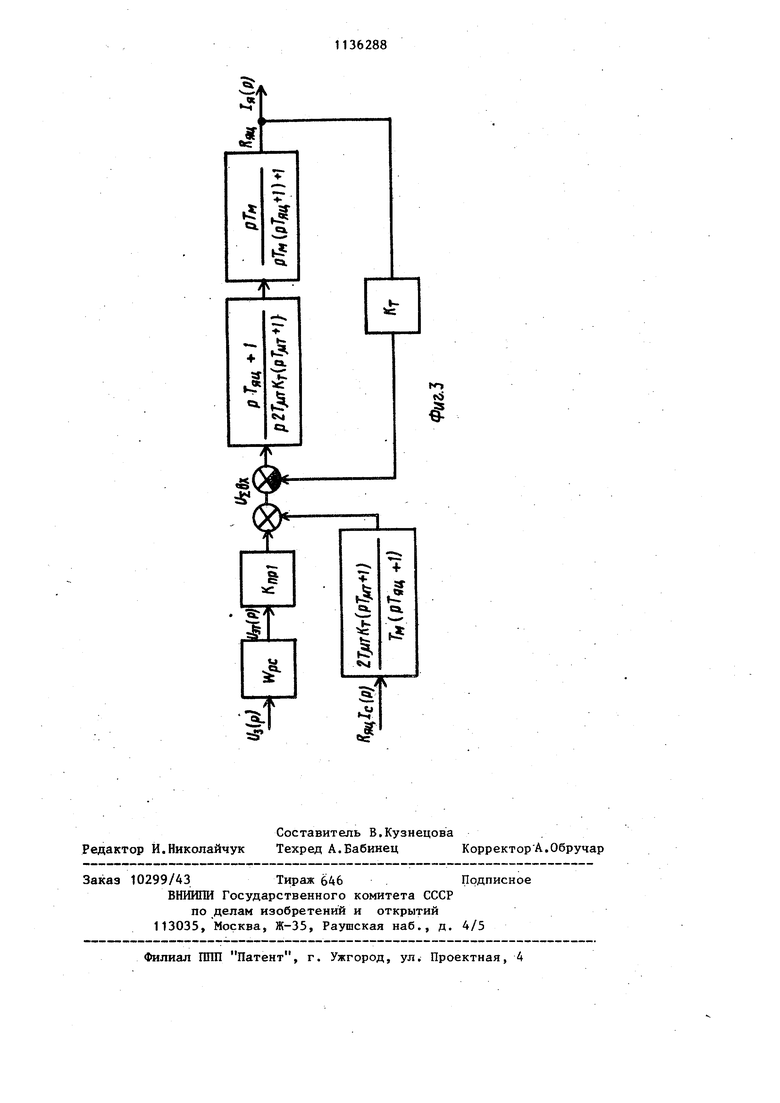
Цель достигается тем, что при способе управления электроприводом, согласно которому определяют режим работы электропривода, измеряют статическую составляющую тока и изменяют уставку ограничения тока пропорционально измеренной статической составляющей тока, при токе электродвигателя, равном Hyjno, уставку ограничения тока устанавливают больщей уровня максимально допустимого тока на величину, пропорциональную 8 2 дит к еще большему его снижению, что увеличивает время торможения. Снижение уровня ограничения максимального (стопорного) тока в динамических режимах, что особенно существенно сказывается в электроприводах, работающих без использования задатчика интенсивности, приводит к затягиванию переходных процессов. Затягивание переходных процессов в электроприводах, работающих в повторно-кратковременном режиме работы, существенно снижает производительность механизма. Наиболее близким к изобретению по технической сущности и достигаемому результату является способ управления электроприводом постоянного тока, согласно которому определяют режим работы электропривода, измеряют статическую составляющую тока и изменяют уставку ограничения тока пропорционально измеренной статической составляющей тока. При этом первоначальную уставку ограничения тока устанавливают пропорциональной допустимому динамическому току (темпу ускорения) и увеличивают ее при разгоне и при торможении пропорционально статической составляющей тока Сз} Недостатком известного способа является ограниченная область его применения (применим для приводов с нерегулируемым возбуждением). Известный способ обеспечивает поддержание постоянства ускорения независимо от нагрузки привода только при разгоне, а в режиме торможения величина замедления существенно зависит от нагрузки. Тем самым накладьшается ограничение на темп ускорения, вследствие чего данный способ не обеспечивает, высокого быстродействия. 3 отношению нескомпенсированной посто янной времени к электромеханической постоянной времени электропривода, при разгоне указанную уставку умень шают, а при торможении увеличивают на величину, пропорциональную произ ведению статической составляющей то ка на указанное отношение постоянных времени. На фиг.1 изображена функциональная схема устройства реализующего способ управления электроприводом; на фиг.2 - структурная схема контура регулирования тока-с учетом вн тренней обратной связи по ЭДС5 на фиг.З - структурная схема контура регулирования тока, преобразованная относительно возмущающего воздействия . Устройство содержит последовател но включенные регулятор 1 частоты вращения, регулятор 2 тока якоря и управляемый преобразователь 3, пита ющий якорную цепь электродвигателя К входу регулятора 1 частоты вращения подключен выход датчика 5 частоты вращения, а к входу регулятора 2 тока якоря - выход датчика 6 тока якоря. Выходы датчиков 5 и 6 соединены с входами датчика 7 статической составляющей тока, выход которого подключен к блоку 8 регулируемого ограничения, соединенном через диоды 9 и 10 с входом регулят ра 1 частоты вращения. Вал электродвигателя 4 связан с исполнительным механизмом 11. Способ включает следующие операции: в электроприводе постоянного т ка подчиненного регулирования при т ке электродвигателя, равном нулю, уставку ограничения тока U устанав ливают большей уставки „ограничения тока, соответствующей максимальному току в статическом режиме, на велич ну, пропорциональную отношению нескомпенсированной постоянной времени контура тока к электромеханической постоянной времени. Указанная настройка компенсирует уровни максимального тока в переходных режимах электропривода без загрузки (ст тическая составляющая тока равна нулю). В рабочих режимах электропри вода, при токе электродвигателя не равном нулю, определяют вид переход ного режима работы электропривода разгон или торможение, а также изме 84 ряют статическую составляющую тока, При разгоне электропривода уставку ограничения тока уменьшают, а при торможении увеличивают на величину, пропорциональную произведению статн-г ческой составляющей тока на указанное отношение постоянных времени. При такой настройке уровень ограничения максимального тока в любых режимах i работы электропривода при токе электродвигателя, равном току ограничения, является постоянно максимально возможным, что сокращает время переходных процессов механизма, тем самым увеличивая его производительность. Согласно преобразованной структурной схеме (фиг.З) по возмущающему воздействию контура регулирования тока, в которой влияние статического момента представлено эквивалент но в виде сигнала задания на допол-нительный статический ток, имеем: , ;2VWr,UTM) SB. SrSp,- -r р,, R,U,IC, где I) j вх сигнал управления на входе регулятора тока; коэффициент приведения сигнала задания и сигнала обратной связи на входе регулятора тока; 2Т,щ. - нескомпенсированная малая постоянная времени тока. - электрбмеханическая постоянная времени системы элек:тропривода;Kf - коэффициент обратной связи по току; дц электромагнитная постоянная времени якорной цепи .электродвигателя, °51ц- сопротивление якорной цепк электродвигателя; 1с - статическая составляющая тока нагрузки; знак + перед lg(p) соответствует Случаю, когда момент сопротивления на валу противодействует движению, а знак - - когда момент сопротивления способствует движению. Тогда для тока якоря можно записать
где
J
Jir
Р)
1.1 .l- -e-7tr
« Uпередаточная функция оптимизированного по модульному оптимуму ко тура тока (без учета при оптимизации внутренней связи по ЭДС электродвигателя) . Из выражений (2) и (3) получаем «k. Up)--и «а. 2V bV( В выражении (4) составляю1цая 2Т,ит() м1р«и,1) приводит к появлению ошибки в динамике, т.е. несоответствию тока двигателя в динамических режимах его стопорному значению, Установившееся значение тока эле тродвигателя в динамическом режиме ЧцсК)) может быть ползгчено из выражения (4) с учетом выражения (1)
.ЙГ«Тц1 - Ы
г
Ь-)оо Р- о
обозначим
2Т
|1«т
т.
тогда
npi
,.,l,. y(i, №
В режиме Ьтопорення, когда скорость электродвигателя равна нулю, величина стопорного тока I определяется из выражения
Т чр
С учетом вьфажения (8) выражение (7) записывается в виде
Яуст-cT
откуда следует, что приближение ,l
35 где
(,
вц
Пр1
знак - соответствует режиму разгона, а + - торможения.
Из вьфажения (11) следует, что для полного совпадения тока якоря со стопорным током в динамических режимах электродвигателя при наличии нагрузки необходимо регулировать напряжение ограничения регулятора скорости в функции и статической составляющей тока. кд электродвигателя в динамических режимах к его стопорному току зависит от соотношения 2Т|цт и от величины статической составляющей якорного тйока. В системе подчиненного регулирования максимальная величина напряжения задания для контура тока L) определяется напряжением ограничения регулятора скорости Unro U Учитывая выражение (10), условие полного совпадения тока якоря электродвигателя в динамических режимах его стопорному току 1, ц,, 1,, на осно(7) и (9) приниве выражения мает вид
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2456741C1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2095931C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
| Электропривод постоянного тока | 1990 |
|
SU1786628A1 |
| Устройство для управления электроприводом постоянного тока механизмов экскаватора | 1971 |
|
SU482854A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА, согласно которому определяют режим работы электропривода, измеряют статическую составляющую тока и изменяют уставку ограничения тока пропорционально измеренной статической составляющей тока, отличающийся тем, что, с целью повьшения быстродействия электропривода при различной его загрузке, при токе электродвигателя, равным нулю, уставку ограничения тока устанавливают большей уровня максимально допустимого тока на величину, пропорциональную отношению нескомпенсированной постоянной времени к электромеханической постоянной врет.1ени электропривода, при разгоне указанную уставку уменьшают, а при торможении увеличавают на величину, пропорциональную произведению статической составляющей тока на указанное отношение постоянных времени.
«SI
jw I
к
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гарнов В.К., Рабинович В.Б Вишневецкий Л.М.Унифицированные системы автоуправления электроприводом в металлургии | |||
| М., Металлур гия, 1971, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 584419, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Червяков В.Д | |||
| Реверсивный электропривод постоянного тока с зависимым от статического момента уровнем токоограничения.- Известия вузов | |||
| Электромеханика, 1972, № 1 с | |||
| Платформенные весы | 1924 |
|
SU1190A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
