1
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. .
Целью изобретения является повышение качества управления.
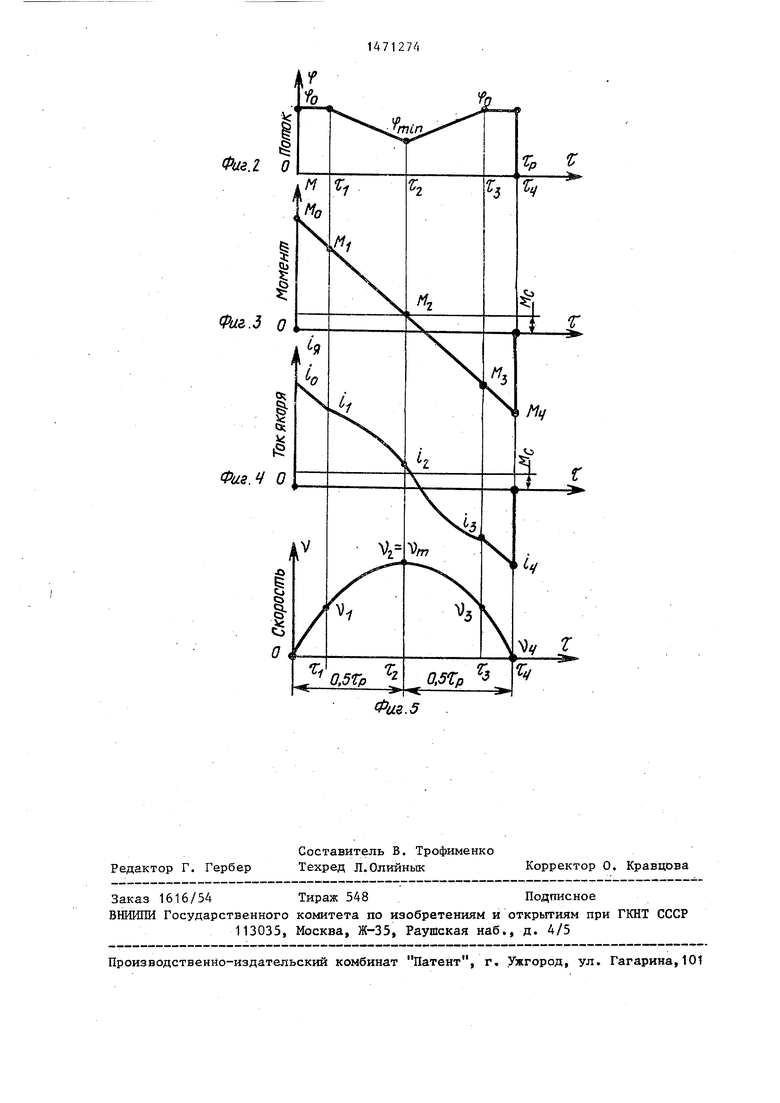
.На фиг. 1 приведена схема электропривода; на фиг. 2-5 - графики изменения параметров электродвигателя.I
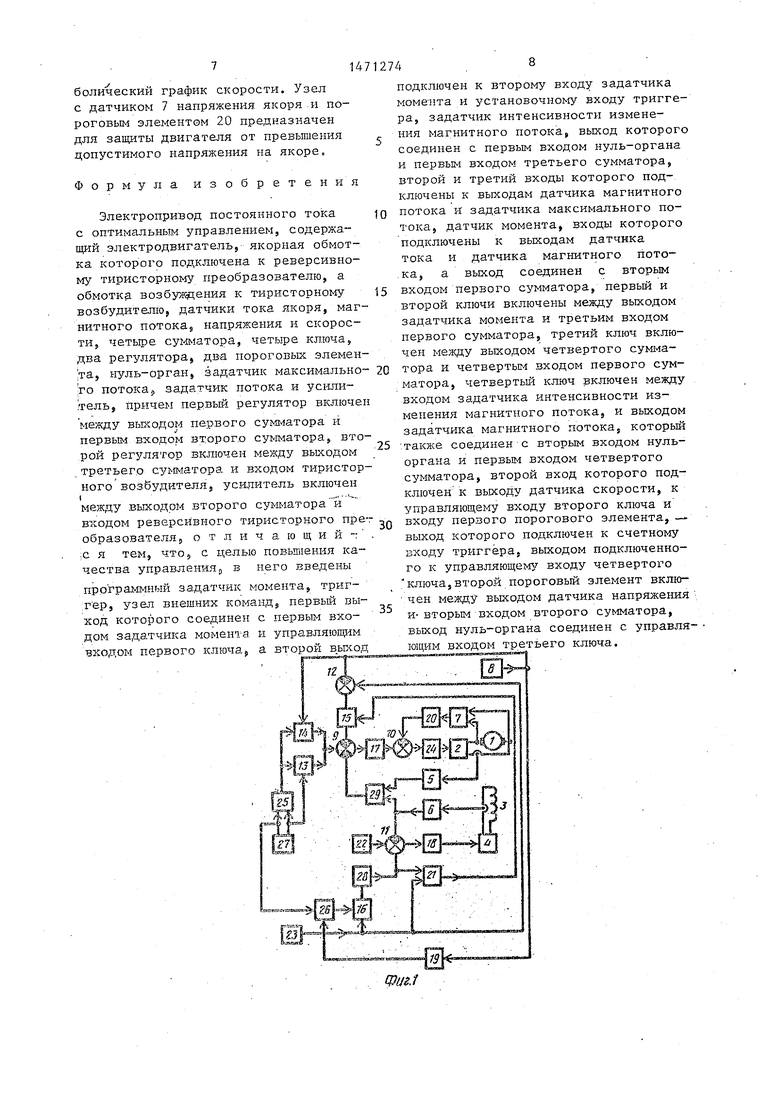
Электропривод постоянного.тока с оптимальным управлением содержит электродвигатель якорная обмотка 1 которого подключена к реверсивнрму тиристорному преобразователю 2, а обмотка 3 возбуждения к тиристорному возбудителю 4, датчики 5-8 соответственно тока якоря, магнитного потока, напряжения и скорости, четыре сумматора 9-12, четыре ключа 13-16, два регулятора 17 и 18, два пороговых элемента 19 и 20, нуль-орган 21, задатчик 22 максимального потока, задатчик 23 потока, усилитель 24. Первый регулятор 17 включен между выходом первого сумматора 9 и первым входом второго сумматора 10, второй регулятор 18 включен между выходом третьего сумматора 11 и входом ти- ристорного возбудителя 4, первый вход четвертого сумматора 12 соединен с выходом датчика 8 скорости, усилитель ,24 включен между выходом второго сумматора 10 и входом реверсивного тиристорного преобразователя 2. Электропривод также содержит
ю
4
31471274
задатчик 25 моментад триггер 26,. узел 27 внешних команд, первый выход которого соединен е первым входом задатчика 25 момента и управляющим входом первого ключа 13, а второй выход подключен к второму входу задатчика 25 момента и установочному входу триггера 26, задатчик 28 интенсивности изменения магнитного потока, выход которого соединен с первым входом третьего сумматора 11, второй и третий входы которого подключены к выходам датчика 6 магнитности, величина которого пропорциональна максимальному начальному моменту (Но на фиг. 2, и задатчика интенсивности сигнала обратной поляр- ности с двумя уставками. Причем величина первой.уставки, включаемой по команде Пуск, .пропорциональная величине, динамической составляю щей момента Чд-,(Чс а значение втор уставки, включаемой по команде Ст пропорционально величине 2(). Общее время интегрирования задатчи ка интенсивности равно длительност
20
25
ного-потока и задатчика 22 максималь-,5 отработанного в переходных ного потока,, датчик. 29 момента, Режимах (без учета участка устано- входы которого подключены к выходам датчика 5 тока и датчика 6 магнитного потока, а выход соединен с вторь м входом первого сумматора 9, первый и второй ключи 13 и 14. включены между выходом задатчика 25 момента и третьим входом первого сумматора 9,, третий ключ 15 включен менсду выходом четвертого сумматора 12 и четвертым входом первого сумматора 9, четвертый ключ 16 включен между выходом задатчика 23 магнитного потока и входом задатчика 28 интенсивности изменения магнитноЪо потока, входы нуль-органа 21 соединены с выходами задатчиков 23 и .28 магнитного потока и интенсивности изменения магнитного потока9 а выход подключен к управляющему входу третьего ключа 15, управляющий вход второго ключа соединен с в ыходом датчика 8 скорости и с входом первого порогового элемента.
30
вход которого подключен к счетному входу триггера 26, выходом подключенного к управляющему входу четвертого ключа, второй пороговый элемент 20 включен между выходом датчика 7 напряжения и BTOPBLM входом второго сумматора 10.
Электропривод работает следующим образом.
По команде Пуск, поступающей . из узла 27 в момент И О, замкнется ключ и программный задатчик 25 момента начинает формировать во времени сигнал задания регулятору 17 момента в виде отрезка, прямой с отрицательным угловым коэффициентом. В простейшем случае программный задатчик момента представляет, собой комбинацию из стабилизированного источника задающего сигнала прямой полярвившегося движения, если он есть).
На первом участке разгона до мо мента времени с j магнитный поток д гателя постоянен и равен максималь ному значению, определяемому уста кой задатчика 22. Датчик 29 при по тоянном потоке работает, как датчи тока якоря, поэтому контур автомат ческого регулирования момента фактически регулирует ток якоря. Благ даря быстродействию контура по это му параметру формирование желаемог графика момента двигателя не вызывает затру нений и двигатель разго няется до основной скорости по оптимальному параболическому графику В момент времени С, сигнал обратно связи по скорости, поступающий с датчика 8, превысит порог срабатыв 35 ния элемента 19 и поступит ный вход триггера 26, что вызовет срабатывание триггера и замыкание ключа 16. Сигнал задания на измене ние магнитного потока и скорости с задатчика 23 поступит на вход зада чика 28 интенсивности, который нач нет формировать во времени сигнал ослабление магнитного потока. Зако изменения магнитного потока значен не имеетf но он должен удовлетворя ограничениям на предельный по усло ям коммутации темп регулирования магнитного потока.
Поскольку замкнутая система ав матического регулирования момента двигателя продолжает отслеживать тимальный график момента и поскол изменения тока якоря протекают на го быстрее, чем и зменения магнитн потока,, то закон изменения тока я ря, автоматически принимает такой чтобы фактический график момента гателя, пропорционального произве
40
45
50
55
ности, величина которого пропорциональна максимальному начальному моменту (Но на фиг. 2, и задатчика интенсивности сигнала обратной поляр- ности с двумя уставками. Причем величина первой.уставки, включаемой по команде Пуск, .пропорциональная величине, динамической составляю-, щей момента Чд-,(Чс а значение второй уставки, включаемой по команде Стоп пропорционально величине 2(). Общее время интегрирования задатчика интенсивности равно длительности.
0
5
5 отработанного в переходных Режимах (без учета участка устано-
0
вившегося движения, если он есть).
На первом участке разгона до момента времени с j магнитный поток двигателя постоянен и равен максимальному значению, определяемому уставкой задатчика 22. Датчик 29 при постоянном потоке работает, как датчик тока якоря, поэтому контур автоматического регулирования момента фактически регулирует ток якоря. Благодаря быстродействию контура по этому параметру формирование желаемого графика момента двигателя не вызывает затру нений и двигатель разгоняется до основной скорости по оптимальному параболическому графику. В момент времени С, сигнал обратной связи по скорости, поступающий с датчика 8, превысит порог срабатыва- 5 ния элемента 19 и поступит на счет- ный вход триггера 26, что вызовет срабатывание триггера и замыкание ключа 16. Сигнал задания на изменение магнитного потока и скорости с задатчика 23 поступит на вход задатчика 28 интенсивности, который начнет формировать во времени сигнал на ослабление магнитного потока. Закон изменения магнитного потока значения не имеетf но он должен удовлетворять ограничениям на предельный по услови-. ям коммутации темп регулирования магнитного потока.
Поскольку замкнутая система автоматического регулирования момента . двигателя продолжает отслеживать оп-. тимальный график момента и поскольку изменения тока якоря протекают намного быстрее, чем и зменения магнитного потока,, то закон изменения тока якоря, автоматически принимает такой вид, чтобы фактический график момента двигателя, пропорционального произведе40
45
50
55
514
нию тока якоря на магнитный поток, и во второй зоне регулирования представлял собой отрезок прямой с отрицательным угловым коэффициентом, скорость вращения пропорциональная интегралу от динамической составляющей момента, являясь отрезком параболы. Если наклон линии момента на участке, соответствующем второй зоне регулирования, изменяется, то при этом изменяется и крутизна отрезка параболы.
Глубина ослабления магнитного потока определяется уставкой задатчика 23 изменения магнитного потока. Кроме того, задание на скорость непре- рьшно сравнивается с сигналом обратной с.вязи в сумматоре .12, но сигнал
рассогласования не пропускается ключом 15. Лишь когда выходное напряжение задатчика 28 интенсивности сравняется на входе нуль-органа 21 с сигналом задания на изменение магнитного потока и скорость, нуль-орган
; 21 сработает и даст команду на замы- :кание ключа 15. После этого сигнал
рассогласования по скорости с сумматора 12 сможет поступать на вход сумматора 9 и при необходимости корректировать первую уставкУ задания на момент двигателя, если она не совпадает со значением, необходимым для
компенсации статиче;ского момента нагрузки. На этом процесс разгона заканчивается . Если в рабочем цикле будет участок установившегося движения (на фиг. 2 его нет), то контур регулирования момента на этом участке поддерживает момент двигателя равньм моменту статической нагрузки и обеспечивает стабилизацию скорости до тех пор, пока узел 27, не подаст команду на остановку привода. По этой команде, во-цервых, сработает триггер 26 и даст команду на размыкание ключа. 16, который обесточит задатчик 28-интенсивности регулирования магнитного потока и вызовет убывание сигнала на его выходе.. Результирующий сигнал задакЕия на выходе сумматора 11 начнет возрастать с постоянной времени задатчика 28 интенсивности, что приведет к возрастанию магнитного потока двигателя. Кроме того, снижение выходного сигнала задатчика 28 интенсивности вызовет от- ключе.ние нуль-органа 21 и размыкание
б
ключа 15 в цепи сигнала коррекции по скорости.
Во-вторых, по команде на остановку привода программный задатчик 25 момента начнет формирование во времени второй уставки момента и сигнал управления на входе сумматора 9 продолжит изменение по закону прямой
с отрицательным угловьм коэффициентом от величины, пропорциональной статическому моменту jlij до величины, пропорциональной разности 2((Uo представляющей собой максимальный
тормозной момент двигателя.
В-третьих, по команде Стоп разомкнется ключ 13 в цепи задания момента, но так как к этому времени уже будет замкнут ключ 14, срабатывающий при наличии скорости, отличной от нуля, то это пока никак не скажется на управлении моментом.
На начальном участке торможения контур регулирования магнитного потока отслеживает закон увеличения поля двигателя, определяемый задат- чиком 28 интенсивности. Одновременно основной контур регулирования момента двигателя отрабатывает оптимальный закон изменения момента, опре - деляемьй программным задатчиком-25. Поскольку оба управляющих сигнала изменяются достаточно медленно в сравнении с быстродействием изменения тока якоря, то отслеживание оптимального графика момента двигателя происходит за счет автоматической под;- стройки характера изменения тока якоря под закон изменения магнитного потока.
С того момента времени, когда оптимальный поток достигнет максимального значения, определяемого уставкой задатчика 22 потока, ток якоря будет повторять в масштабе оптимальный график момента двигателя вплоть до полной остановки электропривода. : При скорости близкой к нулю, разомкнется ключ 14 и отключит задание на момент двигателя полностью.
Таким образом, на протяжении вёе- Го цикла двухзонного регулирования скорости, состоящего из участков разгона и торможения, обеспечивается изменение момента вращения двигателя по закону прямой с отрицательным угловым коэффициентом, что, в свою очередь, обеспечивает оптимальный лараболический график скорости. Узел с датчиком 7 напряжения якоря .и пороговым элементом 20 предназначен для защиты двигателя от превышения допустимого напряжения на якоре.
Формула изобретения
Электропривод постоянного тока с оптимальным управлением, содержащий электродвигатель, якорная обмотка которого подключена к реверсивному тиристорному преобразователю, а обмотку возбуждения к тиристорному возбудителю, датчики тока якоря, магнитного noTOKEs напряжения и скорости, четыре cyNMaTopa, четыре ключа, два регулятора, два пороговых элемента, нуль-орган, задатчик максимально- то потока,, задатчик потока и усили- ;тель, причем первый регулятор включен между выходом первого сум1 1атора и первым входом второго сумматора, второй регулятор включен мелоду выходом третьего сумматора и входом тиристор ного возбудителя,, усилитель включен
между выходом второго сумматора и В7СОДОМ реверсивного тиристорного пре образователя, отличающий-: ;с я тем, что, с целью повышения качества управленияр в него введены программный задатчик момента, триг- г ер, узел внешних команд, первьш вы- ход которого соединен с первым входом задатчика момента, н управляющим входом первого ключа а второй ькод
0
5
подключен к второму входу задатчика момента и установочному входу триггера, задатчик интенсивности изменения магнитного потока, выход которого соединен с первым входом нуль-органа и первым входом третьего сумматора, второй и третий входы которого подключены к выходам датчика магнитного потока и задатчика максимального потока, датчик момента, входы которого подключены к выходам датчика тока и датчика магнитного потока, а выход соединен с вторым входом первого сумматора, первьш и второй ключи включены между выходом задатчика момента и третьим входом первого сумматора, третий ключ включен между выходом четвертого тора и четвертым входом первого сумматора, четвертый ключ включен между входом задатчика интенсивности изменения магнитного потока, и выходом задатчика магнитного потока, который -.также соединен с вторым входом нуль- органа и первым входом четвертого сумматора, второй вход которого подключен к выходу датчика скорости, к управляющему входу второго ключа и входу первого порогового элемента, - выход которого подключен к счетному входу триггера, выходом подключенного к управляющему входу четвертого . ключа,второй пороговый элемент вклю- - чен между выходом датчика напряжения и- вторым входом второго сумматора, выход нуль-органа соединен с управляющим входом третьего ключа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ЭЛЕКТРИЧЕСКОГО ТОРМОЗА | 2019 |
|
RU2709642C1 |
| Электропривод постоянного тока | 1986 |
|
SU1339855A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является повышение качества управления. Устройство содержит задатчик интенсивности 28, выход которого соединен с входом сумматора 11 и с входом нуль-органа 21. Выходы задатчика момента 25 через ключи 13,14 соединены с входом сумматора 9. Устройство позволяет повысить качество управления режимами электропривода с двухзонным регулированием электродвигателя за счет организации оптимальной траектории регулируемых координат-момента и частоты вращения. 5 ил.
| Авторское свидетельство СССР № 754624, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Справочник по автоматизированному электроприводу./Под ред | |||
| В.А.Елисеева | |||
| - М.: Энергоатбмиздат, 1983, с | |||
| Ведущий наконечник для обсадной трубы, употребляемой при изготовлении бетонных свай в грунте | 1916 |
|
SU258A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
