1
Изобретение относится к области управления и регулирования механизмов экскаваторов и может быть использовано в электроприводе любых механизмов, имеющих большие передаточные отношения и частые реверсы, например в продольно-строгальных станках, некоторых типах летучих ножнип, и т. д.
РЬвестно устройство для управления электроприводом постоянного тока, содержашее регулируемые преобразователи в ценн якоря электродвигателя и в цепи возбуждения электродвигателя, цепь обратиой связи по току якоря, выполненную с регулируемым в функции тока возбуждения ограничением и датчик тока возбуждения. Недостатком этого устройства являются удары при выборе зазоров в редукторах с большими передаточными отношениями и ненолное использование динамических и статических свойств электродвигателей.
Целью изобретения является ограничение ударов в механизме экскаватора при одновременном увеличении момента и темпа разгоиа и торможення электродвигателя механизма после окончания выбора зазоров в передаче.
В предложенном устройстве эта цель достигается тем, что датчик тока якоря через функциональный преобразователь подключен к одному входу регулируемого преобразователя в СПИ возбуждеиия электродвигателя, к
другим входам которого присоединены через нелинейный элемент выход датчика напряжения на якоре электродвигателя, и вы.чод логического элемента «И, входы которого присоединены к датчику напряжения на якоре электродвигателя и дополнительному датчику тока якоря электродвигателя.
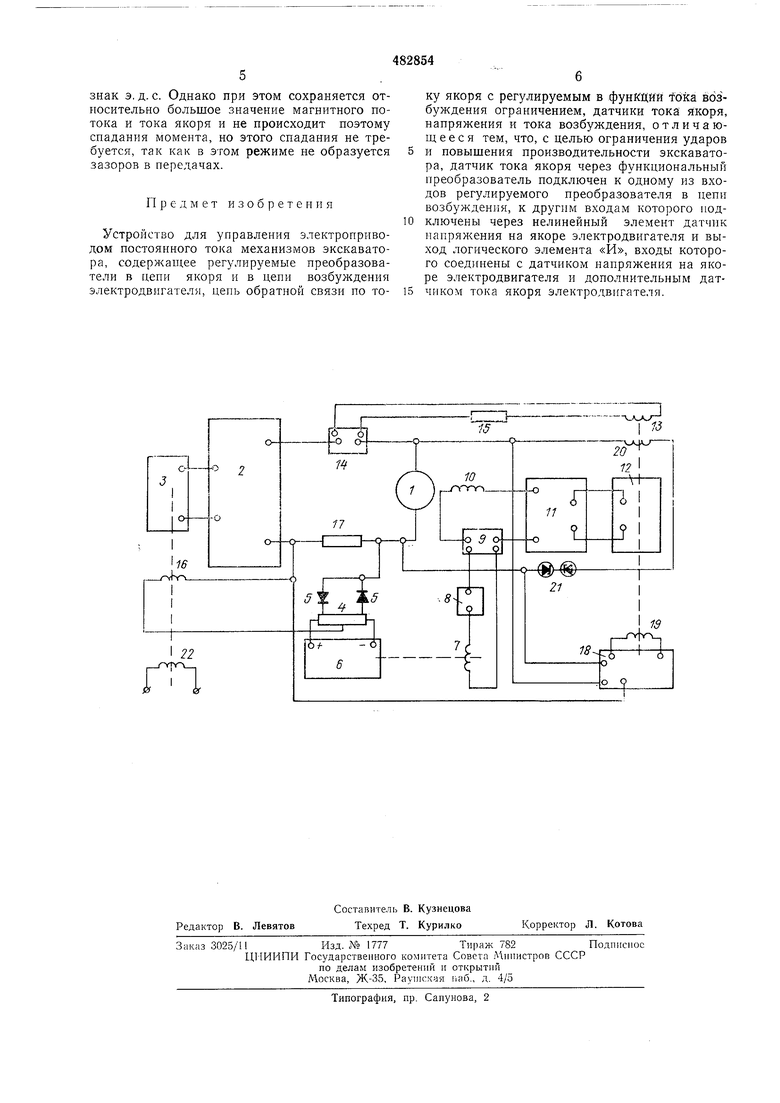
На чертеже изображена структурная схема устройства.
Электродвигатель 1 прпсоедннеи к источиику регулируемого иапряжения постоянного тока 2. Источник 2 содержит иа входе суммирующее устройство 3, которым может служить электромашинный или полупроводниковый усилитель с несколькими независимыми входами. В цепь отрицательной обратной связи по току электродвигателя включены потенциометр 4 и диоды 5. Потенциометр 4 подключен к выходу регулятора тока 6. Задающая обмотка 7 регулятора тока б подключена через диодный функциоиальный преобразователь 8 к датчику тока возбуждения 9. Обмотка возбуждеиия 10 электродвигателя 1 присоединена к возбудителю 11, который имеет входное суммирующее устройство 12. Задающая обмотка 13 суммирующего устройства 12 нодключена к датчику тока 14 якоря электродвигателя через функциональный преобразователь 15. Обмотка 16 отрицательной
обратной связи по току якоря суммирующего
устройства 3 присоединена к датчику тока якоря 17 через диоды 5 и потенциометр 4. К датчику 17 присоединено логическое устройство 18. К выходу логического устройства 18 присоединена обмотка 19 входного устройства 12. Обмотка 20 обратной связи по напряжению устройства 12 подключена к напряжению на якоре электродвигателя 1 через стабилитроны 21. Задающее напряжение подается на обмотку 22 устройства 3.
Устройство работает следующим образом.
Перед началом отработки цикла перемещения обмотка 13 обесточена и электродвигатель 1 имеет минимальный ток возбуждения. Поэтому по обмотке 7 также протекает минимальный ток, что обуславливает минимальное напряжепие на потенциометре 4 и, следовательно, минимальное значение начального тока электродвигателя 1 при пуске.
После подачи задающего напряжения в цепь обмотки 22 на якоре электродвигателя появляется напряжение и течет ток, величина которого определяется малым начальным выходным напряжением регулятора .тока 6. Электродвигатель 1 начинает разгон с малой интенсивностью из-за пониженного тока якоря и пониженного магнитного потока. Под действием тока якоря появляется напряжение на выходе датчика тока 14, но величина нелинейного сопротивления функционального преобразователя 15 в этом режиме велика, и поэтому увеличения выходного напряжения возбудителя электродвигателя не происходит. Ток возбуждения обмотки 10 остается минимальным; минимальным остается напряжение на выходе датчика тока 9, и это обуславливает и минимальное значение выходного напряжения на выходе регулятора тока. Поэтому напряжение на потенциометре 4, «подпирающее диоды 5, будет минимальным, и небольшой ток якоря электродвигателя вызывает на выходе датчика тока 17 напряжение, большее, чем падение напряжение на потенциометре 4. По обмотке 16 потечет ток, который уменьщит действие задающих ампервитков обмотки 22 и тем самым обусловит малый момент. Вследствие разгона с малым моментом электродвнгатель 1 к концу выборки зазоров и сцепления с платформой имеет малую -скорость, и сила удара, пропорциональная квадрату скорости электродвигателя, невелика. После сцепления с платформой происходит значительное увеличение динамической составляющей тока якоря электродвигателя. Под действием возросшего тока якоря электродвигателя увеличивается напряжение на выходе датчика тока 14, величина сопротивления преобразователя 15 падает, и по задающей обмотке 13 начинает протекать ток. В результате растет выходное напряжение суммирующего устройства 12 и самого возбудителя И. Рост напряжения возбудителя 11 вызывает рост тока обмотки возбуждения 10 и напряжения датчика тока 9, а следовательно и тока в задающей обмотке 7 регулятора
тока 6. Напряжение на потенциометре 4 возрастает и ограничение тока якоря электродвигателя 1, осуществляемое обмоткой 16, начнет действовать. Большие значения тока вызывают через описанную выше положительную обратную связь дальнейший рост тока якоря и возбуждения и форсированный разгон. Величина тока якоря в соответствии с предельно допустимыми по механической
прочности и коммутации нагрузки ограничивается диодным функциональным преобразовате.,чем 8. По мере разгона электродвигателя растет напряжение источника постояиного тока 2. При нодходе к номинальному напряжению ток якоря электродвигателя 1 начинает спадать, что приводит к уменьшению тока возбуждения и дальнейшему разгону электродвигателя выше основной скорости. Этот процесс разгона выше основной скорости может продолжаться при отсутствии статического момента до спадания тока возбуждения. При переходе к режиму торможения ток в якорной цепи электродвигателя спадает до «нуля, а затем меняет знак. При спадании
тока в якорной цепи спадает ток возбуждения (если он не был уменьшен до номинального значения в ходе разгона) и уставка регулятора 6. Малый ток якоря электродвигателя и ослаблеиный магнитный поток определяют весьма низкий темп спадания скорости двигателя и, как следствие, низкую относительную скорость зубцов шестерни, сидящий на валу электродвигателя, и ведомой щестерни. Поэтому значительно уменьшается сила удара в передачах при переходе в тормозной режим или реверсировании электродвигателя. После выборки зазора происходит увеличение динамической составляющей тока якоря электродвигателя, магнитного потока и тормозного момента. После изменения знака тока в якоре электродвигателя 1 ток и э. д. с. на входе логического устройства 18 совпадают по знаку и на обмотке 19 появляется напряжение,
обуславливающее дальнейший рост магиитного потока электродвигателя и поддержание
высокого темпа торможения при спадании
скорости до «нуля.
Если скорость электродвигателя 1 перед
началом торможения зиачительно выше основной, то при форсированном нарастании магнитного потока большая э.д. с. электродвигателя может вызвать неконтролируемый рост тока. Для борьбы с этим явлением служат стабилитроны 21, которые имеют порог открывания, равный номинальной э. д. с. электродвигателя. Если э. д. с. электродвигателя становится больше допустимой, то по обмотке 20 протекает ток, обуславливающий сиижеиие темпа нарастания магнитного потока до допустимых пределов.
При снижении скорости в связи с реверсом электродвигателя устройство 18 действует до иерехода скорости через «нуль, так как после перехода скорости через «нуль меняется
знак э. д. с. Однако при этом сохраняется относительно большое значение магнитного потока и тока якоря и не происходит поэтому спадания момента, но этого спадания не требуется, так как в этом режиме не образуется зазоров в передачах.
Предмет изобретения
Устройство для управления электроприводом постоянного тока механизмов экскаватора, содержащее регулируемые преобразователи в цепи якоря и в цепи возбуждения электродвигателя, цепь обратной связи по току якоря с регулируемым в функций foka возбуждения ограничением, датчики тока якоря, напряжения и тока возбуждения, отличающееся тем, что, с целью ограничения ударов и повышения производительности экскаватора, датчик тока якоря через функциональный преобразователь подключен к одному из входов регулируемого преобразователя в цепи возбуждения, к другим входам которого подключены через нелинейный элемент датчик напряжения на якоре электродвигателя и выход логического элемента «И, входы которого соединены с датчиком напряжения на якоре электродвигателя и дополнительным датчиком тока якоря электродвигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока механизмов экскаватора | 1974 |
|
SU663794A2 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| СПОСОБ ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА С ЛЮФТОМ В КИНЕМАТИЧЕСКОЙПЕРЕДАЧЕ | 1969 |
|
SU436424A1 |
| Электропривод | 1990 |
|
SU1758820A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Устройство для двухзонного регулирования скорости | 1973 |
|
SU568131A1 |
