1
О)
ю
05
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1982 |
|
SU1084934A1 |
| Устройство для управления электроприводом поворота экскаватора | 1982 |
|
SU1164373A1 |
| Способ управления электроприводом поворота экскаватора | 1979 |
|
SU899805A1 |
| Способ регулирования скорости электропривода многомассовой системы | 1991 |
|
SU1820470A1 |
| Электропривод постоянного тока по системе генератор-двигатель с упругим звеном и способ для его управления | 1987 |
|
SU1723649A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Способ двухзонного регулирования частоты вращения электродвигателя постоянного тока и устройство для его осуществления | 1981 |
|
SU995248A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Устройство для ограничения и демпфирования нагрузок в двухдвигательном электроприводе поворота экскаватора | 1985 |
|
SU1273462A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
Изобретение относится к строительному и горному машиностроению и позволяет повысить надежность элект- ромеханического оборудования механизма поворота экскаватора. Способ основан на изменении напряжения, подаваемого на якорную обмотку электродвигателя (ЭД) в функции рассогласования заданной и фактической частоты вращения ЭД, ограничении тока якорной цепи, измерении первой производной (П) -частоты вращения ЭД и компенсации с помощью сигнала по этой П влияния внутренней обратной связи по ЭДС ЭД на темп разгона и торможения поворотной платформы. Дополнительно измеряют мгновенное значение периодической составляющей о (Л
сриг.1
вращения ЭД, Для этого измеряют вторую П частоты вращения ЭД и дважды интегрируют этот сигнал, пропорцио- нальньм второй П частоты вращения. В функции мгновенного значения периодической составляющей вращения ЭД осу- ществляют дополнительное изменение подаваемого на якорную обмотку ЭД напряжения. Изменение периодической составляющей частоты вращения ЭД осу1
Изобретение относится к строительному и горному машиностроению, например к экскаваторам.
Целью изобретения является повышение надежности электромеханического оборудования механизма поворота экскаватора.
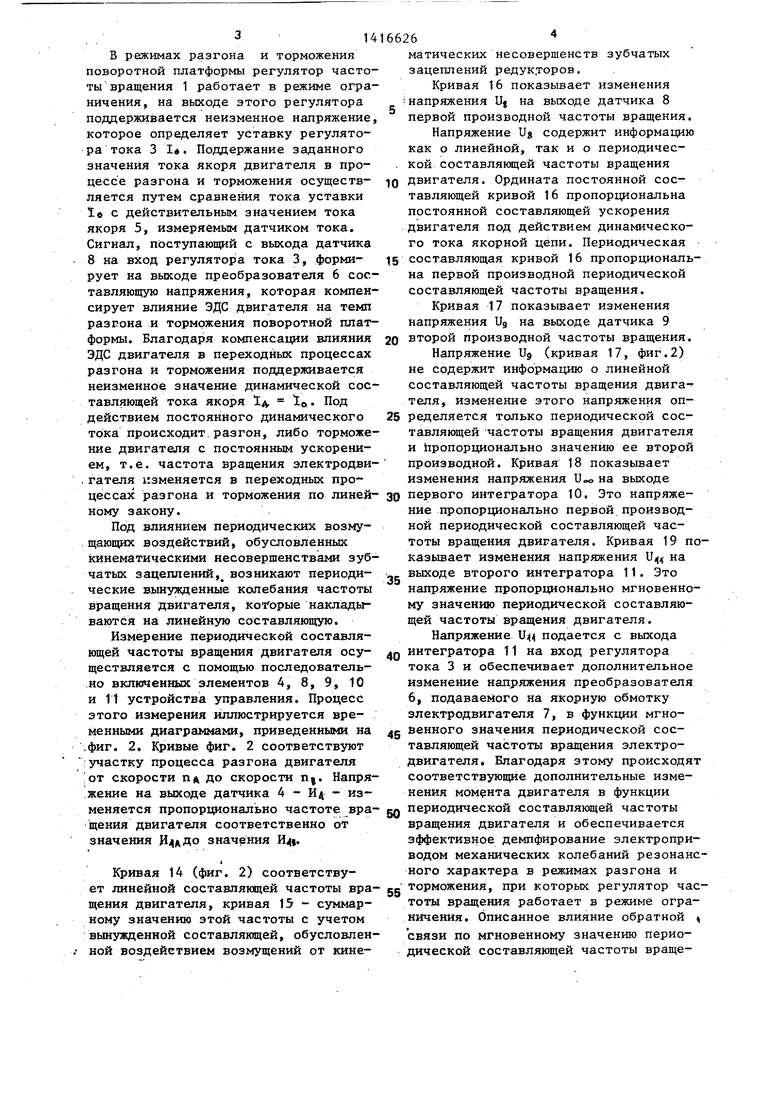
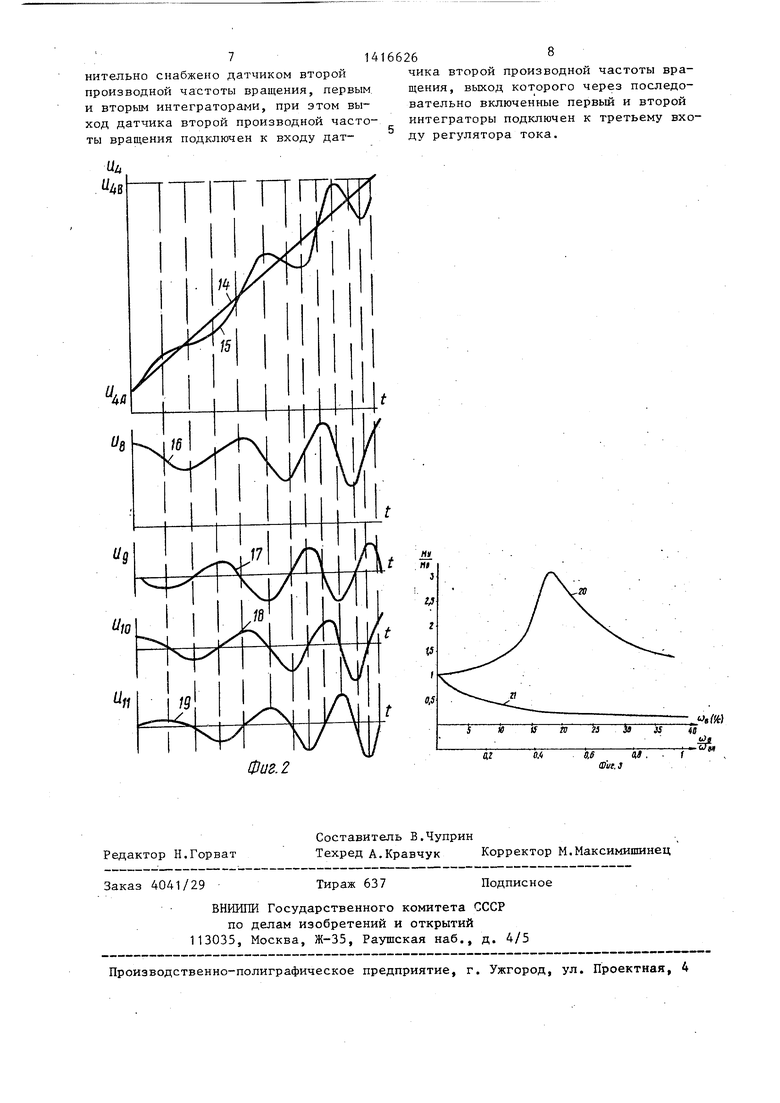
.На фиг. 1 приведена принципиальная схема устройства для осуществления способа , на фиг. 2 - временные диаграммы, поясняющие работу устройства управления электроприводом поворота экскаватора} на фиг. 3 - амплитудно-частотные характеристики электромеханической системы в виде отношения амплитуды периодической составляющей момента в упругой связи механизма М, к .амплитуде во.змущающего момента Mj в функции частоты возмущающего момента и),
По горизонтальной оси (фиг. 3) отложена также относительная частота возмущающего момента u)j , вьфаженная в долях от частоты возмущающего момента сОбн при номинальной частоте вращения электродвигателя.
Согласно способу управления элект- приводом поворота экскаватора путем изменения напряжения, подаваемого на якорную обмотКу электродвигателя, в функции рассогласования заданной и фактической частот вращения электродвигателя, ограничения тока якорной цепи, измерения первой производной частоты вращения двигателя и компенсации с помощью сигнала по этой производной влияния внутренней обратной связи по ЭДС двигателя на темп разгона и торможения поворотной платформы, дополнительно измеряют мгноществляется с помощью последовательно включенных датчика 4 частоты вращения, датчиков 8 и 9 первой и второй П частоты вращения, первого 10 и второго 11 интеграторов. С выхода интегратора 11 напряжение подается на вход регулятора 3 тока и обеспечивает дополнительное изменение тока, подаваемого на якорную обмотку ЭД. 1 з.п. ф-лы, 3 ил.
венное значение периодической составляющей частоты вращения двигателя, для чего измеряют вторую производную частоты вращения и затем дважды интегрирзтот сигнал, пропорциональный второй производной частоты вращения, и осуществляют дополнительное изменение напряжения, подаваемого на якорную обмотку электродвигателя, в функдии мгновенного значения периодической составляющей частоты вращения электродвигателя.
Устройство управления, осуществляющее данный способ, содержит поСле
довательнр включенные регулятор частоты вращения 1 с ограничением 2 в цепи обратной связи и пропорционально интегральньй регулятор тока 3 с подключенными к их входам соответственно датчиками частоты вращения 4 и тока якоря 5, тиристорный преобразователь 6, питающий якорную цепь электродвигателя 7, датчик 8 первой производной частоты вращения, подключенный ко входу регулятора тока 3.
Устройство зт равления содержит также последовательно включенные датчик 9 второй производной частоты вращения, первый интегратор 10 и второй
интегратор 11, причем вход датчика 9 соединен с выходом датчика 6 первой производной частоты вращения, а выход интегратора 11 подключен ко входу регулятора тока 3. Двигатель 7 кинематически связан через упругую связь 12 (редуктор) с поворотной платформой 13.
Устройство функционирует следующим образом.
3 14 В режимах разгона и торможения поворотной платформы регулятор частоты вращения 1 работает в режиме ограничения, на выходе этого регулятора поддерживается неизменное напряжение, которое определяет уставку регулятора тока 3 I. Поддержание заданного значения тока якоря двигателя в процессе разгона и торможения осуществляется путем сравнения тока уставки 1в с действительным значением тока якоря 5, измеряемым датчиком тока. Сигнал, поступающий с выхода датчика 8 на вход регулятора тока 3, формирует на выходе преобразователя 6 составляющую напряжения, которая компенсирует влияние ЭДС двигателя на темп разсова и торможения поворотной платформы. Благодаря компенсации влияния ЭДС двигателя в переходных процессах разгона и торможения поддерживается неизменное значение динамической составляющей тока якоря а Под действием постоянного динамического тЬка происходит разгон, либо торможение двигателя с постоянным ускорением, т.е. частота вращения электродви, гателя 1:зменяется в переходных процессах разгона и торможения по линейному закону.
Под влиянием периодических возму. щающих воздействий, обусловленных кинематическими несовершенствами зубчатых зацеплений, возникают периодические вынужденные колебания частоты вращения двигателя, которые накладываются на линейную составляющую.
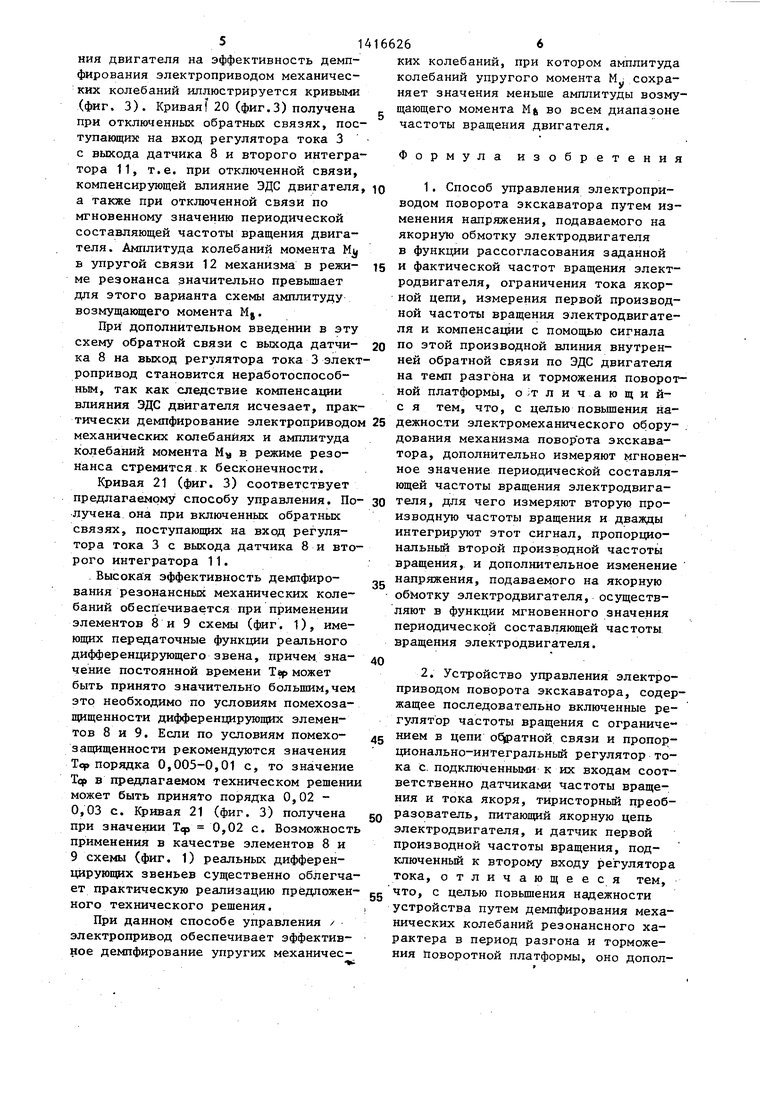
Измерение периодической составляющей частоты вращения двигателя осуществляется с помощью последовательно включенных элементов 4, 8, 9, 10 и 11 устройства управления. Процесс этого измерения иллюстрируется вре- Е енными диаграммами, приведенными на
.фиг. 2. Кривые фиг. 2 соответствуют участку процесса разгона двигателя
от скорости ПА до скорости П|. Напряжение на выходе датчика 4 - Ид - изменяется пропорционально частоте вращения двигателя соответственно от значения значения Иду.
I
Кривая 14 (фиг. 2) соответствует линейной составляющей частоты вращения двигателя, кривая 15 - суммарному значению этой частоты с учетом вынужденной составляющей, обусловленной воздействием возмущений от кине6626
матических несовершенств зубчатых зацеплений редук.торов.
Кривая 16 показывает изменения напряжения Uj на выходе датчика 8 первой производной частоты вращения. Напряжение Ug содержит информацию как о линейной, так и о периодичес- . кой составляницей частоты вращения
JO двигателя. Ордината постоянной составляющей кривой 16 пропорциональна постоянной составляющей ускорения двигателя под действием динамического тока якорной цепи. Периодическая
5 составляющая кривой 16 пропорциональна первой производной периодической составляющей частоты вращения.
Кривая 17 показывает изменения напряжения Ug на выходе датчика 9
0 второй производной частоты вращения.
Напряжение Uj (кривая 17, фиг.2) не содержит информацию о линейной составляющей частоты вращения двигателя, изменение этого напряжения оп5 ределяется только периодической составляющей частоты вращения двигателя и пропорционально значению ее второй производной. Кривая 18 показывает изменения напряжения Uoo на выходе
0 первого интегратора 10. Это напряжение пропорционально первой производной периодической составляющей частоты вращения двигателя. Кривая 19 показывает изменения напряжения V на выходе второго интегратора 11. Это напряжение пропорционально мгновенному значению периодической составляющей частоты вращения двигателя. Напряжение подается с выхода
д интегратора 11 на вход регулятора тока 3 и обеспечивает дополнительное изменение напряжения преобразователя 6, подаваемого на якорную обмотку электродвигателя 7, в функции мгноg венного значения периодической составляющей частоты вращения электродвигателя. Благодаря этому происходят соответствующие дополнительные изменения момента двигателя в функции периодической составляющей частоты вращения двигателя и обеспечивается эффективное демпфирование электроприводом механических колебаний резонансного характера в режимах разгона и
торможения, при которых регулятор частоты вращения работает в режиме ограничения. Описанное влияние обратной связи по мгновенному значению периодической составляющей частоты враще5
0
ния двигателя на эффективность демпфирования электроприводом механических колебаний иллюстрируется кривыми (фиг. 3). Кривая 20 (фиг.З) получена при отключенных обратных связях, поступающих на вход регулятора тока 3 с выхода датчика 8 и второго интегратора 11, т.е. при отключенной связи, компенсирующей влияние ЭДС двигателя, а также при отключенной связи по мгновенному значению периодической составляющей частоты вращения двигателя. Амплитуда колебаний момента Mj в упругой связи 12 механизма в режи- ме резонанса значительно превышает для этого варианта схемы амплитуду возмущающего момента Mj.
При дополнительном введении в эту схему обратной связи с выхода датчи- ка 8 на выход регулятора тока 3 электропривод становится неработоспособным, так как следствие компенсации влияния ЭДС двигателя исчезает, практически демпфирование электроприводом 25 дежности электромеханического обору- .
механических колебаниях и амплитуда колебаний момента М в режиме резонанса стремится к бесконечности. Кривая 21 (фиг. 3) соответствует
предлагаемрмУ способу управления. По- ЗО теля, для чего измеряют вторую пролучена она при включенных обратньк связях, поступающих на вход регулятора тока 3 с выхода датчика 8 и второго интегратора 11.
Высокая эффективность демпфирования резонансных механических колебаний обеспечивается при применении элементов 8 и 9 схемы (фиг. 1), имеющих передаточные функции реального дифференцирующего звена, причем значение постоянной времени Тер может быть принято значительно большим,чем это необходимо по условиям помехозащищенности дифференцирующих элементов 8 и 9. Если по условиям помехозащищенности рекомендуются значения Тер порядка 0,005-0,01 с, то значение Тф в предлагаемом техническом решении может быть принято порядка 0,02 - 0,03 с. Кривая 21 (фиг. 3) получена при значении 0,02 с. Возможность применения в качестве элементов 8 и 9 схемы (фиг. 1) реальных дифференцирующих звеньев существенно облегчает практическую реализацию предложенного технического решения.
При данном способе управления / электропривод обеспечивает эффективное демпфирование упругих механических колебаний, при котором амплитуда колебаний упругого момента М, сохраняет значения меньше амплитуды возмущающего момента М во всем диапазоне частоты вращения двигателя.
Формула изобретения
Редактор Н.Горват
Составитель В.Чуприн
Техред А.Кравчук Корректор М.Максимишинец
Заказ 4041/29
Тираж 637
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
а
Jtm
ол
s,s 0,1. Ф т.з
Подписное
| Ольховиков В.В., Калинская Д.А., Розенцвайг А.Б | |||
| Автоматизированный электропривод, вып | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Комитет по автоматизированному электроприводу | |||
| Свердловск, 1984, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вейнгер A.M., Караман В.В., Тар- таковский Ю.С., Чудновский В.П | |||
| Проектирование электроприводов | |||
| Справочник | |||
| Свердловск, Средне-Уральское книжное издательство | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Фальцовая черепица | 0 |
|
SU75A1 |
