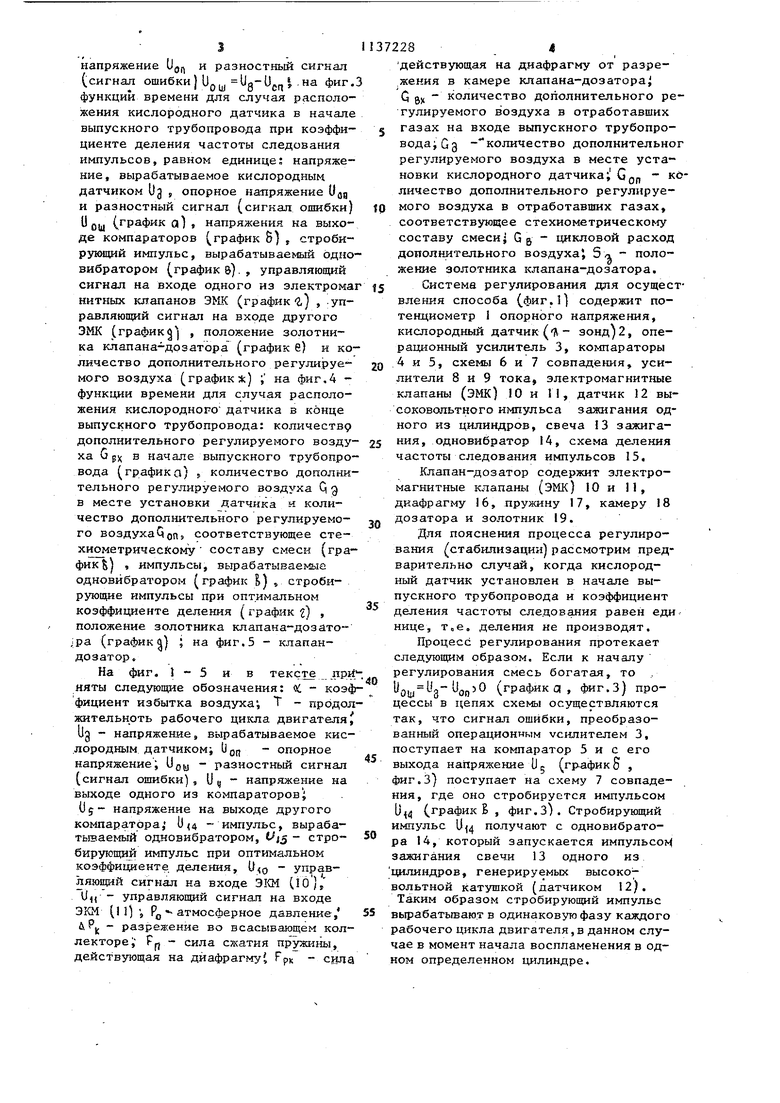
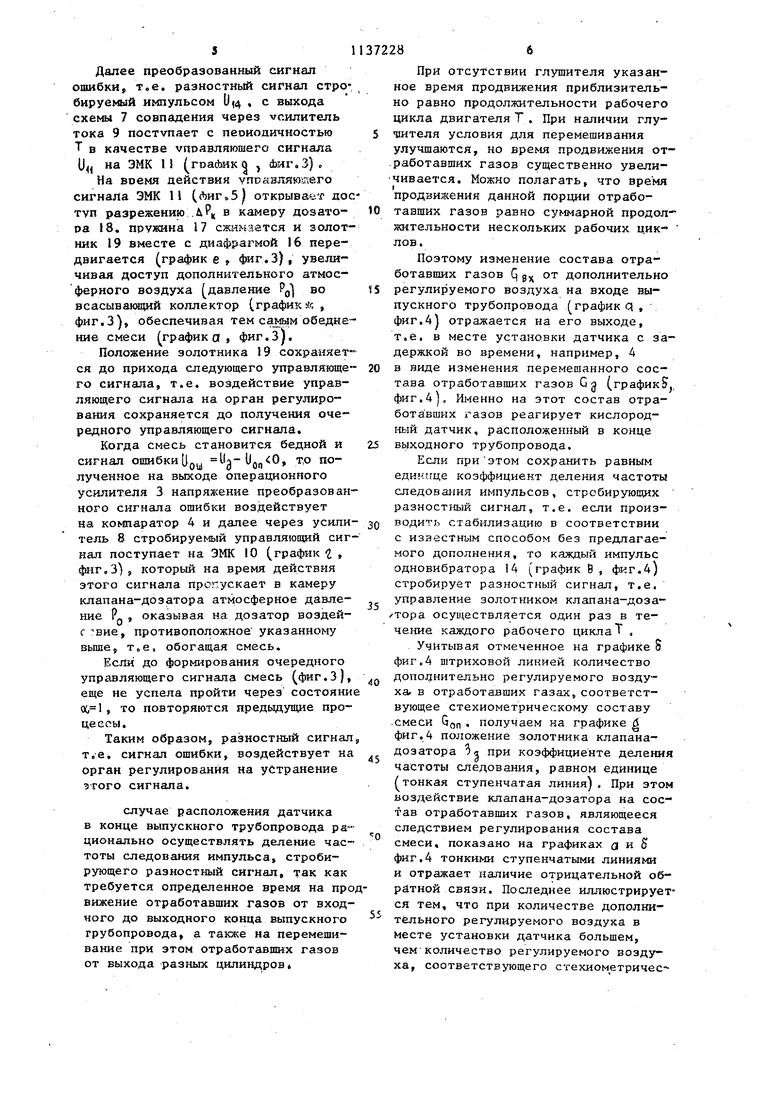
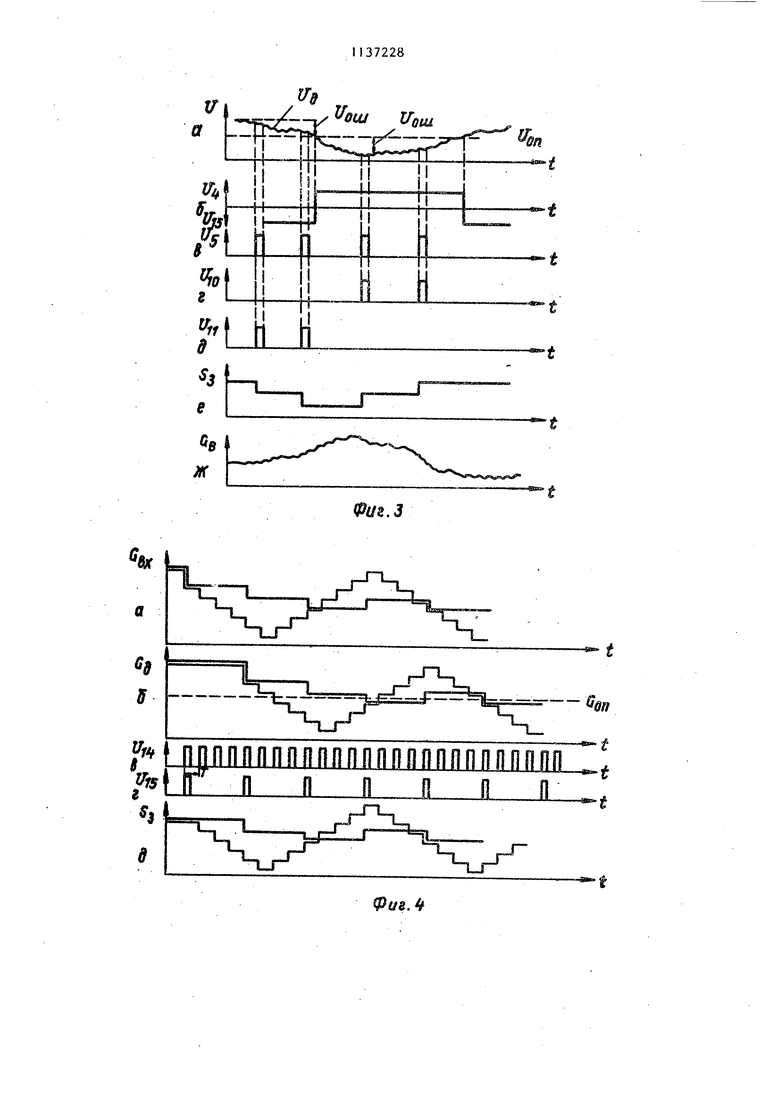
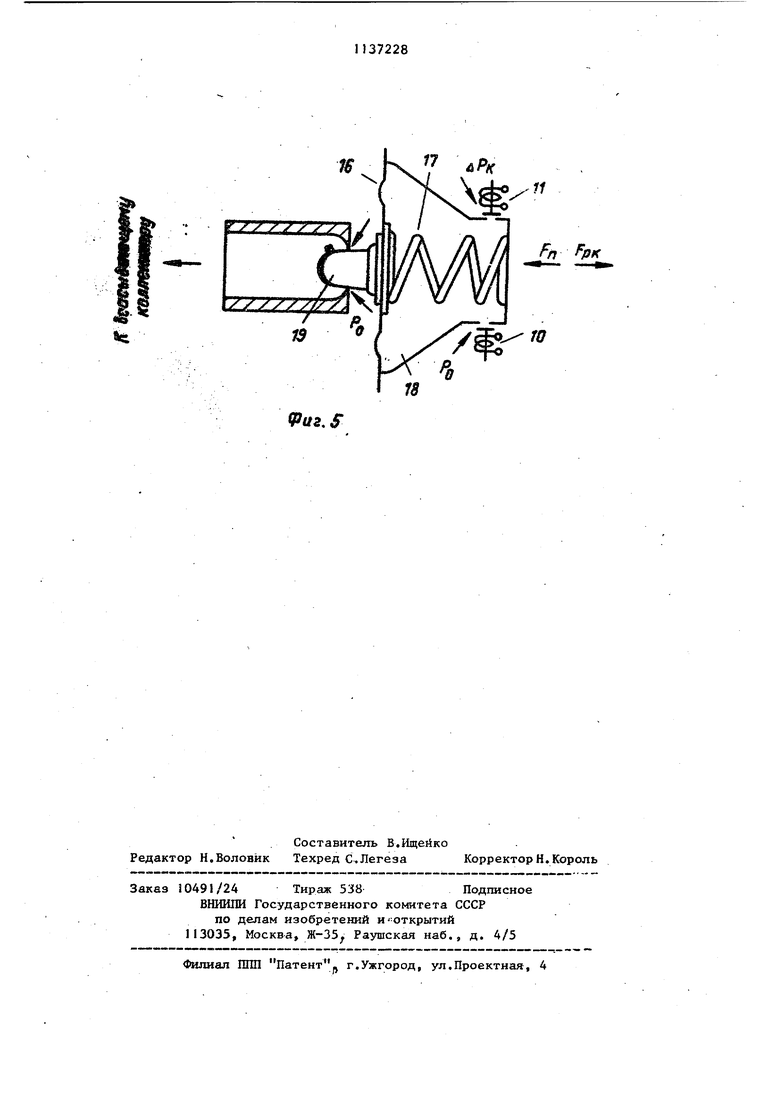
Изобретение относится к двигатепестроению, в частности к автоматическому регулированию двигателей внутреннего сгорания. По основному авт.св. № 966267 известен способ стабилизации стехио метрического состава смеси в двигателе внутреннего сгорания путем регистрации сигнала от датчика состава отработавших газов, задания уров ня опорного напряжения, соответствующего стехиометрическому составу смеси, сравнения с ним сигнала датчика, выработки по результатам срав нения разностного сигнала и воздейс ВИЯ на орган регулирования топливовоздушной смеси на устранение этого сигнала, причем вырабатывают в одинаковую фазу каждого рабочего цикла двигателя импульс и формируют управляющий сигнал путем стробирования этим импульсом разностногосиг нала, а результат воздействия каждо го управляющего сигнала на орган регулирования сохраняют до получения очередного управляющего сигнала , Однако данный способ является пр емлемым для случаев, когда датчик состава отработавших газов расположен в начале выпускного трубопровода вблизи блока цилиндров. Такое расположение датчика обоспечивает. сравнительно малуг инерционность системы стабилизации, но датчик реа гирует на состав отработавших газов того цилиндра, в котором в данный момент осуществляется выпуск, что обусловливает снижение качества про цесса регулирования, так как изменение состава смеси происходит во всех цилиндрах по составу отработав ших газов лишь одного из них. Для устранения этого несоответствия в некоторых системах датчик располагают в конце выходного трубопровода. В этом случае отработавшие газы всех цилиндров до подхода к датчику успевают перемешиваться и датчик реагирует на состав отработавших газов, обусловленный суммарным воздействием всех цилиндров Кроме того, регулирование по составу- отработавших газов в конце выпу кного трубопровода обосновано еще и т что отработавшие газы непосредственно после выпускного трубопровод попадают дпя очистки в трехкомпоне ный каталитический нейтрализатор. который действует только при составе отработавших газов, поступающих в него, точно соответствующем заданному стехиометрическому составу смеси, Расположение датчика в конце выпускного трубопровода неизбежно приводит к повьш1ению инерционности системы регулирования (стабилизации), поскольку на прохождение отработавших газов по выпускному трубопроводу затрачивается определенное время, существенно зависящее от частоты вращения коленчатого вала. Кроме того, способ характеризуется недостаточной точностью и, как следствие этого, к ухудшенными качествами очистки (нейтрализации) отработавших газов. Цель изобретения - повышение точности стабилизации стехиометрического состава смеси. Поставленная цель достигается тем, что согласно способу стабилизации стехиометрйческого состава смеси в двигателе внутреннего сгорания путем регистрации сигнала от датчика состава отработавших газов, задания уровня опорного напряжения, соответствующего стехиометрическому составу смеси, сравнения с ним сигнала датчика, выработки по результатам сравнения разностного сигнала и воздействия им на орган регулирования тогшивовоздушной смеси на устранение этого сигнала, причем вырабатывают в одинаковую фазу каждого рабочего цикла импульс и формируют управляющий сигнал путем стро.бирования этим и пульсом разностного сигнала, а результат воздействия каждого управляющего сигнала на орган регулирования сохраняют до получения очередного управляющего сигнала, перед формированием управляющего сигнала измеряют амплитуды разностного сигнала, фиксируют минимальную амплитуду, по которой подбирают коэффициент деления частоты следования импульсов, и управляющий сигнал фирмируют с учетом этого коэффициента. На фиг.I изображена упрощенная функциональная схема для осуществления способа} на фиг.2 - зависимость напряжения 0, , вырабатываемого датчиком состава отработавших газов (кислородного датчика), от коэффициента избытка воздуха оС , опорное напряжение и разностный сигнал (сигнал ошибки) Ug-Ujj I-на фиг функции времени для случая расположения кислородного датчика в начале выпускного трубопровода при коэффи- циенте деления частоты следования импульсов, равном единице; напряжение, вырабатываемое кислородным датчиком УЗ , опорное напряжение Uag и разностный сигнал (сигнал ошибки) (1 ощ (график а) , напряжения на выходе компараторов (график S), стробиР3 ющий импульс, вырабатываемый одно вибратором (график в)., управляющий сигнал на входе одного из электрома нитных клапанов ЭМК (график ,) , -управляющий сигнал на входе другого ЭМК (график2I , положение золотника клапана-дозатора (график е) и ко личество дополнительного регулируем мого воздуха (график) ; на фиг,4 функции времени для случая расположения кислородного датчика в конце выпускного трубопровода: количествр дополнительного регулируемого возду ха G5х в начале выпускного трубопро вода (графике) 5 количество дополни тельного регулируемого воздуха Q g в месте установки датчика и количество дополнительного регулируемого воздухаQ on S соответствующее стехиометричесЛому составу смеси (гра фик S) « импульсы, вырабатываемые одновйбратором (график &) , стробирующие импульсы при оптимальном коэффициенте деления (график ) , положение золотника клапана-дозато ;ра (графику) ; на фиг.З - клапандозаторНа фиг. I - 5 и в тексте „при няты следующие обозначения: «С - коэф фициент избытка воздуха , Т - продол жительнрть рабочего цикла двигателя Уд - напряжение, вырабатываемое кислородным датчиком UQJJ - опорное напряжение; Ugy - разностный сигнал (сигнал ошибки), Ug - напряжение на выходе одного из компараторовi (Jf напряжение на выходе другого компаратора, - импульс, вырабатываемый одновйбратором, стробирующий импульс при оптимальном коэффициенте, деления, ( - управляющий сигнал на входе (I0}f ( управляющий сигнал на входе ЭКМ 11) , Рд- атмосферное давление, & Р - разрежение во всасывающем коллекторе Ffj - сила сжатия пружины, действующая на диафрагму Ррк - сила действующая на диафрагму от разрежения в камере клапана-дозатора О бх количество дополнительного регулируемого воздуха в отработавших газах на входе выпускного трубопровода; Gg - количество дополнительног регулируемого воздуха в месте установки кислородного датчика; Ggn личество дополнительного регулируемого воздуха в отработавших газах, соответствующее стехиометрическому составу смесиj G - цикловой расход дополнительного воздуха . За положение золотника клапана-дозатора. Система регулирования для осуществления способа (фиг.П содержит потенциометр i опорного напряжения, кислородный датчик (Л - зонд) 2, операционный усилитель 3, компараторы 4 и 5, схемы 6 и 7 совпадения, усилители 8 н 9 тока, электромагнитные клапаны (ЭЖ) 10 и 11, датчик 12 высоковольтного импульса зажигания одного из цилиндров, свеча 13 зажигания, одновибратор 14, схема деления частоты следования импульсов 15. Клапан-дозатор содержит электромагнитные клапаны (ЭМК) 10 и 11, диафрагму 16, пружину 17, камеру 18 дозатора и золотник 19. Для пояснения процесса регулирования стабилизации) рассмотрим предварительно случай, когда кислородный датчик установлен в начале выпускного трубопровода и коэффициент деления частоты следования равен еди нице. Tee, деления не производят. Процесс регулирования протекает следующим образом. Если к началу регулирования смесь богатая, то , У-,ц 1д-Оод50 (графика, фиг.З) процессы в цепях схемы осуществляются так, что сигнал ошибки, преобразованный операционным усилителем 3, поступает на компаратор 5 и с его выхода напряжение и 5 (график 5 , фиг.З} поступает на схему 7 совпадения, где оно стробируется импульсом 1)4 (график В , фиг.З). Стробирующий иьшульс 11ц получают с одно вибратора 14, который запускается импульсоН зажигания свечи 13 одного из цилиндров, генерируемых высоковольтной катушкой (датчиком 12). Таким образом стробирующий импулвс вырабатьшают в одинаковую фазу каждого рабочего цикла двигателя,в данном случае в момент начала воспламенения в одном определенном цилиндре. Далее преобразованный сигнал ошибки, т.е. разностный сигнал стробируе1 01 й и шyльcoм Уц с выхода схемы 7 совпадения через vг.илитeль тока 9 поступает с периодичностью Т в качестве упоавляюшего сигнала и на ЭМК 11 (roadbHK Лиг.З). На воемя действия управляк лего сигнала ЭМК П () откоывает до туп разрежению .ЛРК в камеру дозатора 18. пружина 17 сжимается и золот ник 19 вместе с диафрагмой 16 передвигается (графике, фиг.З), увеличивая доступ дополнительного атмосферного воздуха (давление Р во всасывакиций коллектор (график , фиг.З), обеспечивая тем cajMHM обедне ние смеси (графика , фиг.З). Положение золотника 19 сохраняет ся до прихода следующего управляюще го сигнала, т.е. воздействие управляющего сигнала на орган регулирования сохраняется до получеш1я очередного управляющего сигнала. Когда смесь становится бедной и сигнал ошибкиУр ° лученное на выходе операционного усилителя 3 напряжение преобразован ного сигнала ошибки воздействует на компаратор 4 и далее через усили тель 8 стробируемый управляювщй сиг нал поступает на ЭМК 10 (график 1 , фиг,3), который на время действия этого сигнала пропускает в камеру клапана-дозатора атмосферное давление Р. , оказывая на дозатор воздейс :вие, противоположное указанному выше, , обогащая смесь. Если до формирования очередного управляющего сигнала смесь (фиг.З) еще не успела пройти через состояни , то повторяются предыдущие процессы. Таким образом, разностный сигнал т.е. сигнал ошибки, воздействует н орган регулирования на устранение этого сигнала. случае расположения датчика в конце выпускного трубопровода ра ционально осуществлять деление час тоты следования импульса, стробирующего разностный сигнал, так как требуется определенное время на пр вижение отработавших газов от вход ного до выходного конца выпускного трубопровода, а также на перемешивание при этом отработавпюх газов от выхода разных цилиндров 86 При отсутствии глушителя указанное время продвижения приблизительно равно продолжительности рабочего цикла двигателя Т. При наличии глу иителя условия для перемешивания улучшаются, но время продвижения от работавших газов существенно увеличивается. Можно полагать, что время продвижения данной порции отработавших газов равно суммарной продолжительности нескольких рабочих циклов. Поэтому изменение состава отработавших газов Q g от дополнительно регулируемого воздуха на входе выпускного трубопровода (график Q, фиг.4 отражается на его выходе, т.е. в месте установки датчика с задержкой во времени, например, 4 в виде изменения перемешанного состава отработавших газов Gg (график,, фиг,4. Именно на этот состав отработавших газов реагирует кислородный датчик, расположенный в конце выходного трубопровода, Если приэтом сохранить равным единице коэффициент деления частоты следова шя импульсов, стробирующих разностный сигнал, т.е. если производить стабилизацию в соответствии с известным способом без предлагаемого дополнения, то каждый импульс одновибратора 14 (график В , фкг.4) стробирует разностный сигнал, т.е. управление золотником клапана-дозатора осуществляется один раз в течение каждого рабочего цикла Т . Учитывая отмеченное на графике S фиг.4 штриховой линией количество дополнительно регулируемого возду ха. в отработавших газах, соответствующее стехиометрическому составу .смеси Ggn, получаем на графике фиг,4 положение золотника клапанадозатора ч при коэффициенте деления частоты следования, равном единице (тонкая ступенчатая линия). При этом воздействие клапана-дозатора на состав отработавших газов, являющееся следствием регулирования состава смеси, показано на графиках дни фиг,4 тонкими ступенчатыми линиями и отражает наличие отрицательной обрйтной связи. Последнее иллюстрируется тем, что при количестве дополнительного регулируемого воздуха в месте установки датчика большем, чем количество регулируемого воздуха, соответствующего стехиометричес-кому составу смеси QQ (график 5J золотник клапана-дозатора передвигает ся в такую сторону, что количество воздуха уменьшается. При количестве дополнительного регулируемого воздуха меньшем QO происходит обратный процесс. При зтом видно, что состав смеси в процессе регулирования существенно отклоняется от стехиометрического, поскольку происходит существенное отклонение количества до полнительного регулируемого воздуха от C(Qf. , и.е. точность стабилизации невелика. В изобретении с целью повышения точности стабилизации перед формированием управляющего сигнала измеряют амплитуды разностного сигнала, фиксируют минимальную амплцтуду, по которой подбирают коэффициент деления частоты .следования импульсов и управляющий сигнал формируют с учетом подобранного коэффициента. Полученные для этого случая стробируюшие импульсы 0 при оптимальном коэффициенте деления показаны на гра фике (j фиг.4. Жирными ступенчатыг ми линиями показаны на фиг.4 для этого случая положение золотника клапана- дозатора 8о (график п) и воздействие клапана-дозатора на состав отработавших газов / графики а и 5.) . Граф; 5 фиг,4 показывает, что в предлокенном способе отклонение состава отработавших газов от .состава отработавших газов, соответствующего стехиометрическому составу смеси, в процессе регулирования мень ше и , следовательно, точность стабилизации выше, чем в способе . 2288 Подбор коэффициента деления осуществляется для каждой марки автомобиля или с учетом конкретных условий установки двигателя вне автомобиля. Подбор коэффициента деления осуществляют По минимальной амплитуде разностного сигнала. Правомерность такого подхода поясняется следующим образом. В процессе подбора коэффициента деления при его изменении изменяется максимальное отклонение количества дополнительного регулируемого воздуха Qg в месте установки датчика от количества этого воздуха, соответствующего стехиометрическому составу смеси (график S фиг,4). В соответствии с этим изменяется амплитуда разностного сигнала, т,е, сигнала ошибкиUj., (фиг.2) .Поэтому, получая, например, осциллограммы разностного сигнала, типа осциллограммы, показанной на графике а фиг.1, в процессе подбора коэффициента деления добиваются получения минимальной амплитуды разностного сигнала, что соответствует минимальному откло нению состава смеси от стехиометри- . ческого, т.е. максимальной точности стабилизации. Выбрав коэффициент деления частоты следования импульсов по минимальной аьшлитуде разностного сигнала, этот коэффициентсохраняют на все время осуществления процесса регулирования. Использование изобретения в карбюраторных двигателях позволяет сниить уровень основных токсических компонентов-окислов азота, углеродаГ и углеводорода в окружающей среде.
««
Г Фиг.1
cr
ш
8П
Фи.з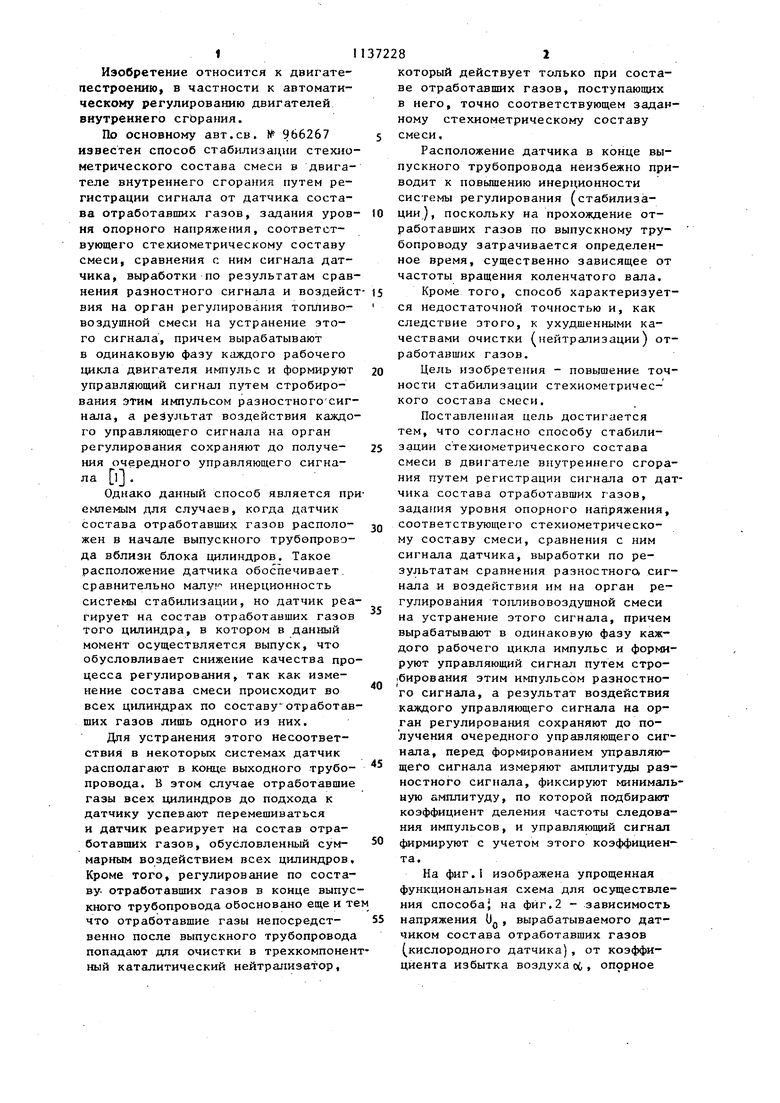
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации стехиометрического состава смеси в двигателе внутреннего сгорания | 1981 |
|
SU966267A1 |
| Способ регулирования работы карбюраторного двигателя внутреннего сгорания | 1982 |
|
SU1041729A1 |
| Система питания для двигателя внутреннего сгорания | 1975 |
|
SU869568A3 |
| Способ регулирования двигателя внутреннего сгорания | 1981 |
|
SU1183703A1 |
| Индукционный преобразователь перемещения в длительность импульса | 1979 |
|
SU1041728A1 |
| Способ регулирования карбюраторного двигателя внутреннего сгорания | 1980 |
|
SU939801A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2008 |
|
RU2443886C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ КИСЛОРОДНЫМ ДАТЧИКОМ РЕГУЛИРУЕМОГО НАПРЯЖЕНИЯ | 2015 |
|
RU2702068C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РЕГУЛИРОВКИ ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ | 2012 |
|
RU2602025C2 |
| Способ регулирования двигателя внутреннего сгорания с рециркуляцией отработавших газов | 1980 |
|
SU1260548A2 |
СПОСОБ СТАБИЖЗАЦИИ СТЕХИОМЕТРИЧЕСКОГО СОСТАВА СМЕСИ В ДВИГА - i ТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ по авт. св. № 966267, отлнч ающийс я тем, что, с целью повьпоекия точности стабилиза1Д1и, перед формированием управляющего сигнала измеряют амплитуды разностного сигнала, фиксируют минимальную амплитуду, по которой подбирают коэффициент деления частоты следования импульсов, и управляющий сигнал фирмируют с учетом подобранного, коэффициента.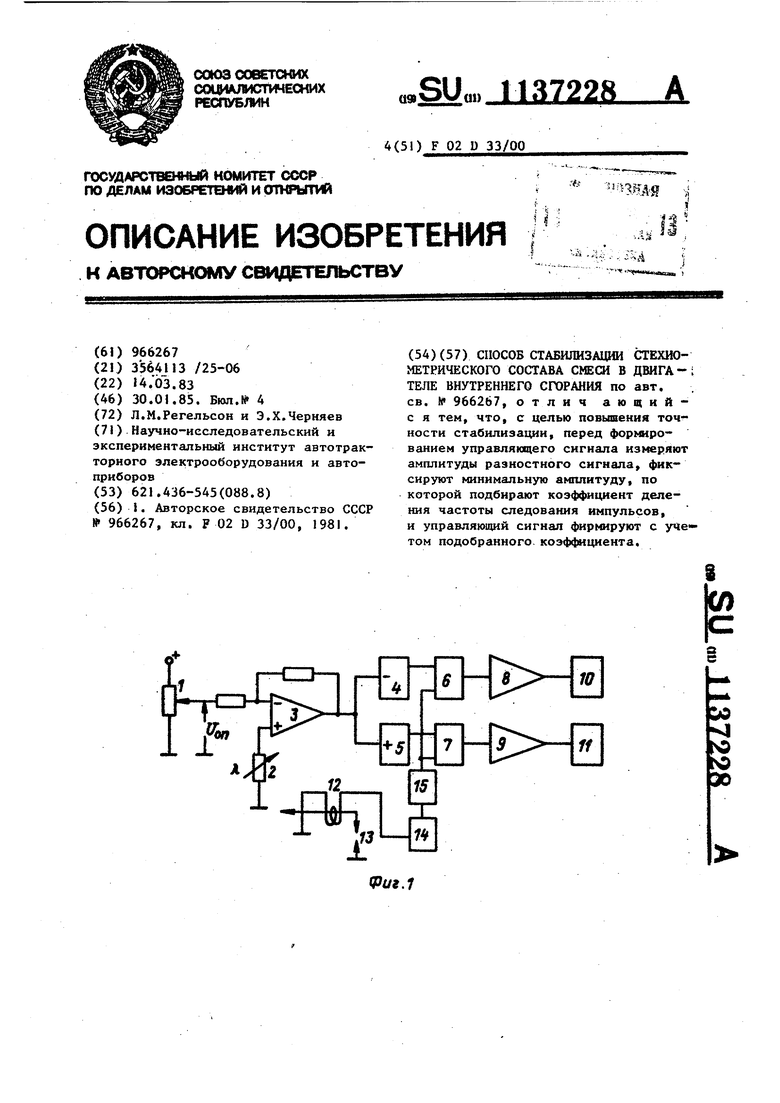
Pua.S 7 4/v Fn л
| i | |||
| Способ стабилизации стехиометрического состава смеси в двигателе внутреннего сгорания | 1981 |
|
SU966267A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
