Изобретение относится к области регулирования двигателей внутреннего сгорания, в частности к регулированию двигателей легкого топлива, в том числе с форкамернофакельным зажиганием.
Известен способ регулирования двигателя внутреннего сгорания путем измерения каждого временного интервала, вычисления значения нестабильности вращения коленчатого вала как разности величин, определяемых в двух соседних интервалах, измерения нагрузки двигателя и частоты вращения вала, определения опорного уровня нестабильности, измерения разности между текущим значением и опорным уровнем нестабильности, выработки по этой разности управляющего сигнала на ее устранение, анализа состава отработавщих газов и в случае его отклонения от состава, соответствующего стехиометрической смеси, выработки для его восстановления командного сигнала, которым в совокупности с управляющим сигналом воздействуют на топливоподачу и количество рециркулируемых отработавших газов, причем командным сигналом воздействуют на орган управления топливоподачей, а управляющим - на орган управления количеством рециркулируемых отработавщих газов 1.
В этом способе в качестве временного интервала выбран период вращения коленчатого вала, а нестабильность определяется как разность между двумя последовательными временными интервалами, т. е. как разность между двумя последовательными периодами вращения вала. Это определяет то, что при принятой мере нестабильности как разности двух последовательных периодов вращения неисправность одного из цилиндров многоцилиндрового двигателя вызывает ложный сигнал значительной величины и, следовательно, существенно снижает качество регулирования. Кроме того, при принятой мере нестабильности как разности двух последовательных временных интервалов регулирование рециркуляции возможно только на установивщихся скоростных режимах работы двигателя. На неустановившихся скоростных режимах разность между текущим значением и опорным уровнем нестабильности, имеющая малую амплитуду и равновероятный знак; не может быть выяв лена на фоне регулярного и значительного изменения частоты вращения вала.
Недостатком способа также является то, что в нем не отражена -необходимость коррекции угла опережения зажигания по количеству рециркулируемых отработавщих газов.
Цель изобретения - улучшение процесса регулирования.
С этой целью в качестве временного интервала принимают продолжительность рабочего цикла двигателя, определяют ускорение вращения вала в каждом рабочем
цикле и в качестве разности величин, определяемых в течение двух соседних циклов, принимают разность полученных ускорений, после чего с учетом количества рецирку лируемых отработавщих газов осуществляют коррекцию угла опережения зажигания. На фиг. 1 показаны зависимости удельного расхода топлива gt от коэффициента избытка воздуха при отсутствии рециркуляции отработавщих газов (а) и при
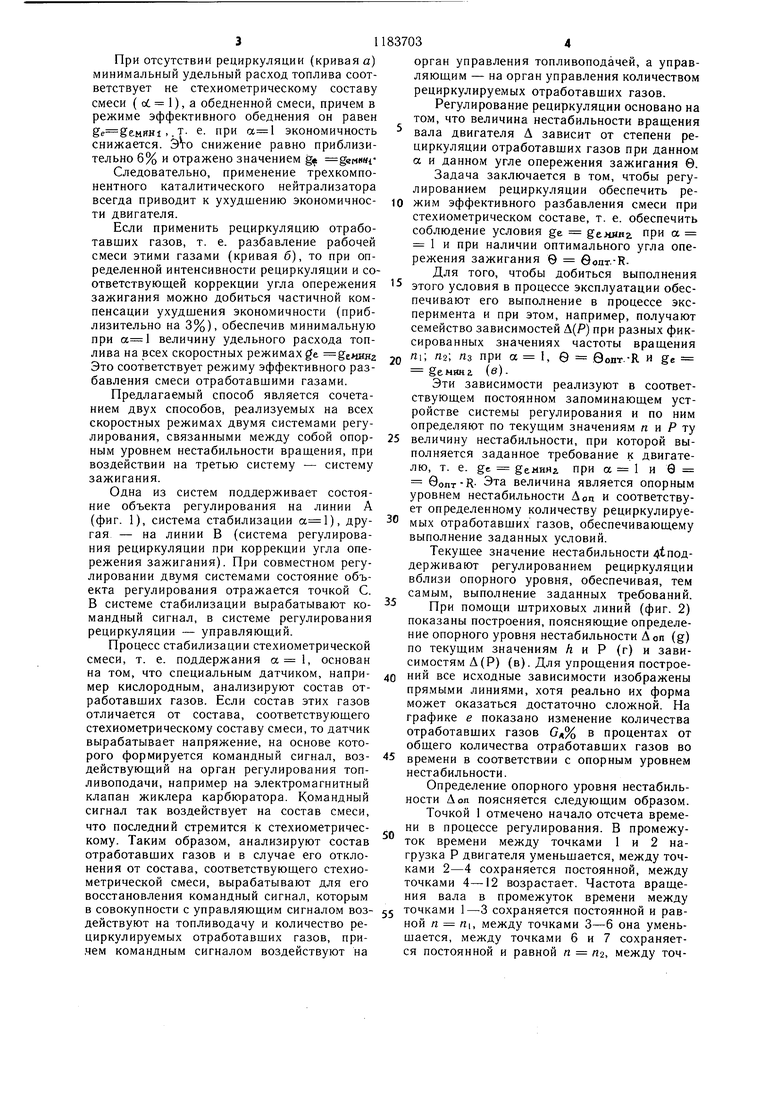
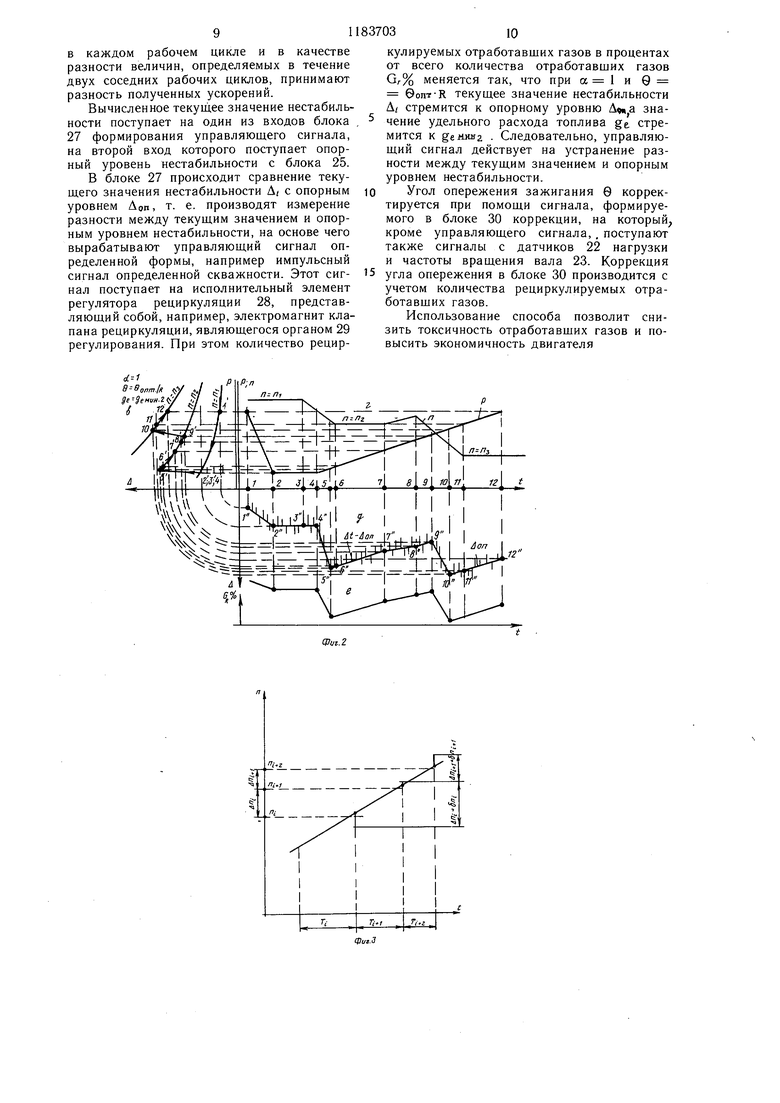
0 наличии рециркуляции и коррекции угла опережения зажигания (б); на. фиг. 2 - семейство зависимостей Д(Р) (д изменения нагрузки и частоты вращения вала во времени (г), значения опорного уровня
нестабильности и разности между текущим значением и опорным уровнем нестабильности (д), зависимость количества рециркулируемых отработавщих газов в процентах от общего количества отработавщих газов по времени (е); на фиг. 3 -
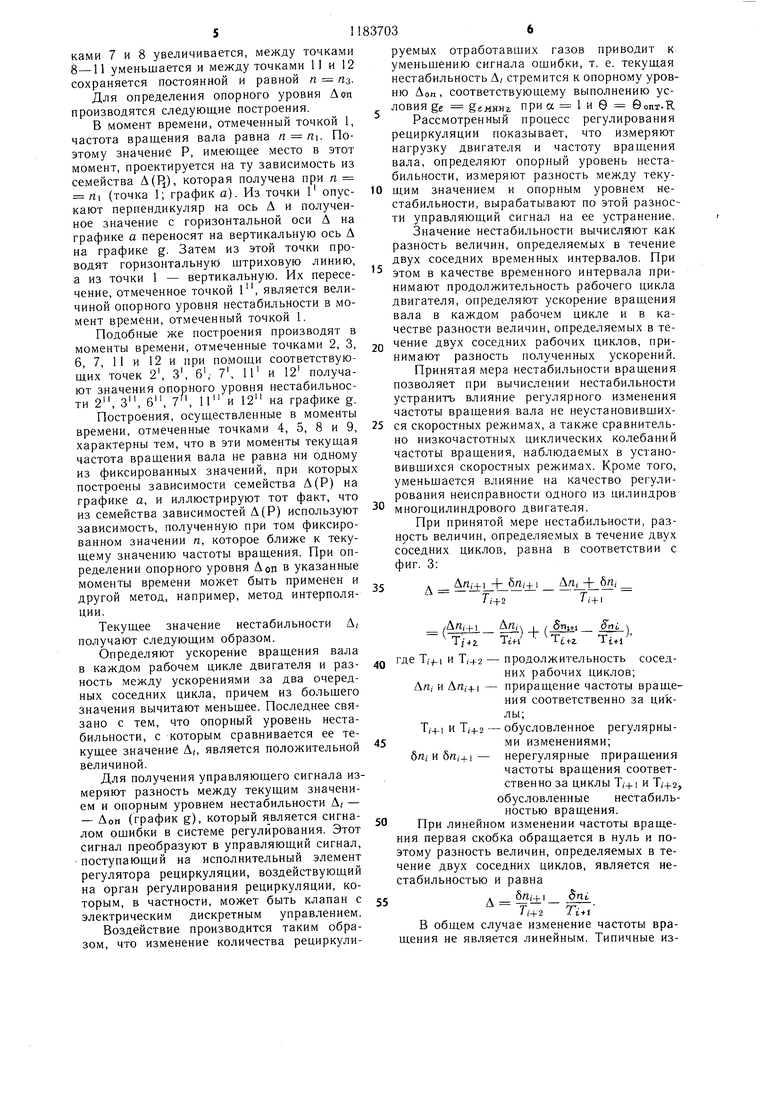
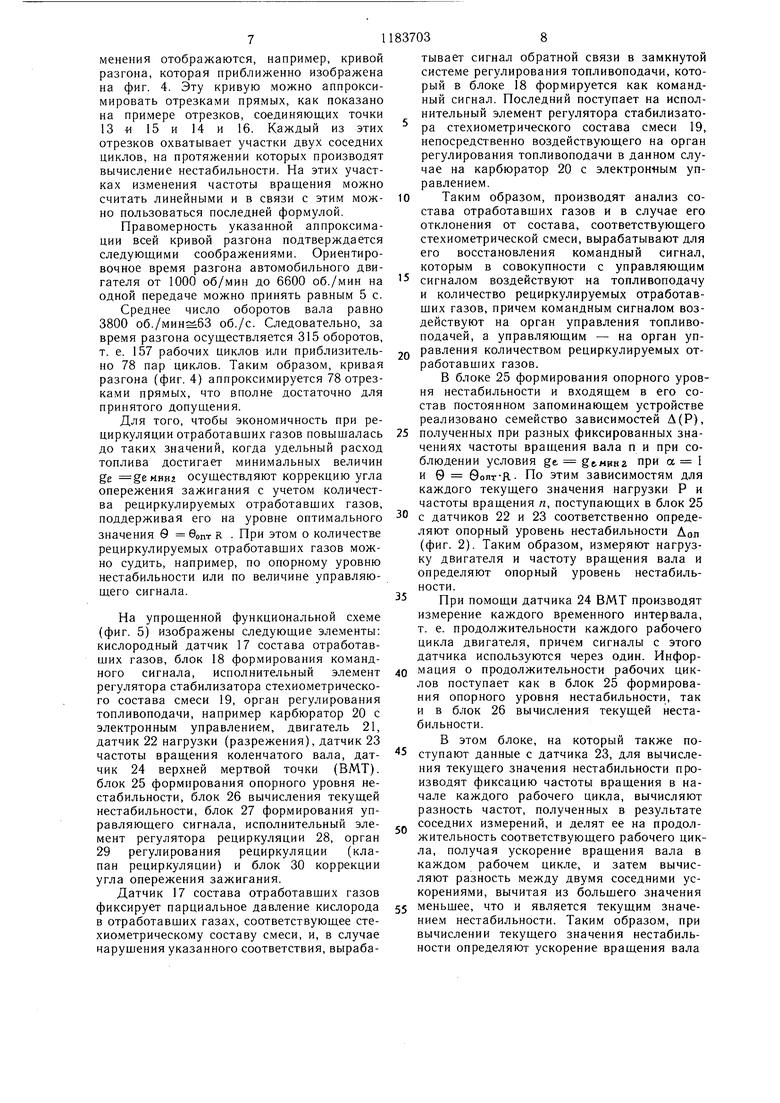
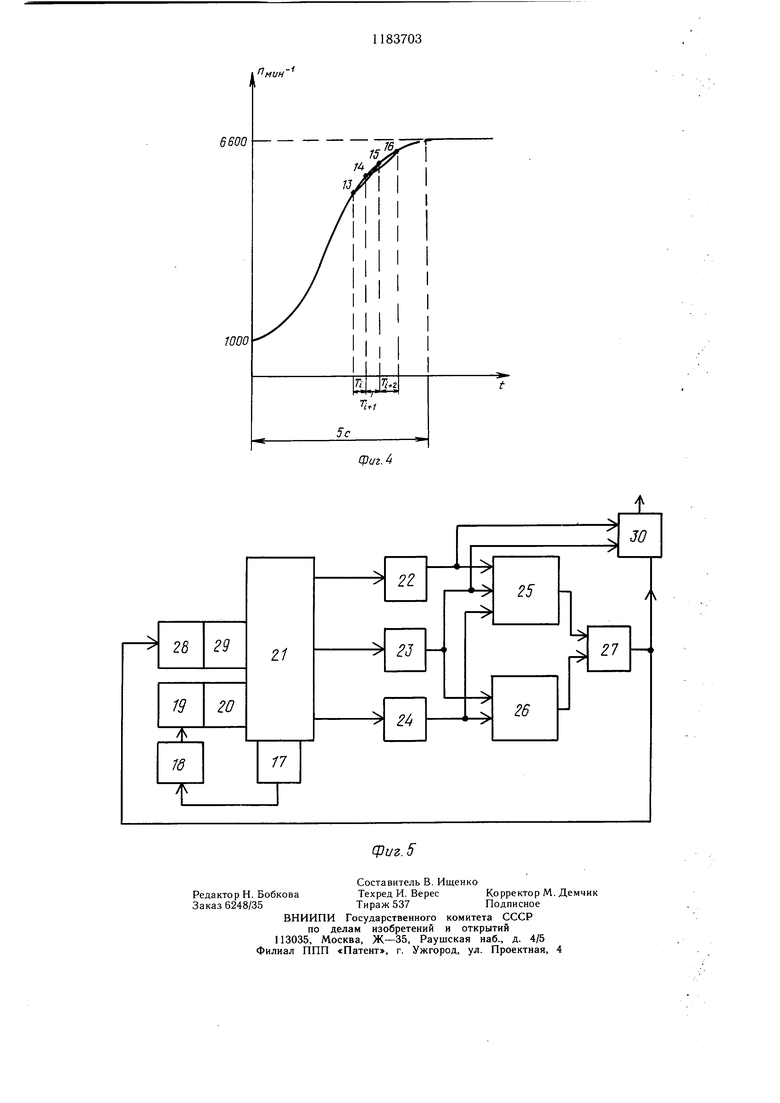
0 линейное изменение частоты вращения вала во времени и ее приращение за счет нестабильности; на фиг. 4 - аппроксимация кривой разгона; на фиг. 5 - упрощенная функциональная схема для реализации способа.
Приняты также следующие обозначения: Р - нагрузка двигателя; п - частота вращения вала двигателя; Лп - приращение частоты вращения вала за счет регулярных изменений , бп - приращение частоты
Q вращения вала за счет нестабильности; Т - продолжительность рабочего цикла двигателя; А - нестабильность вращения вала двигателя; А/ - текущее значение нестабильности вращения, А on - опорный уровень нестабильности вращения; а - коэффициент избытка воздуха; 0 - угол опережения зажигания; 6 опт-В- оптимальный угол опережения при рециркуляции отработавщих газов; g, - удельный расход топлива; geMHH. - минимальный удельный расход топлива при отсутствии рециркуляции, в режиме эффективного обеднения смеси,- ) - удельный расход топлива при отсутствии рециркуляции при оС 1; gtwiW2минимальный удельный расход топлива при наличии рециркуляции и коррекции угла опережения зажигания и Оц% - количество рециркулируемых отработавщих газов в процентах от общего количества отработавщих газов.
Одновременное регулирование рециркуляции и топливоподачи при коррекции угла опережения зажигания (фиг. 1), производят для обеспечения работы трехкомпонентного каталитического нейтрализатора, радикально снижающего уровень всех основных токсических компонентов, но требующего наличия стехиометрического состава смеси (а 1) и для одновременного обеспечения максимальной в этих условиях экономичности двигателя.
При отсутствии рециркуляции (кривая а) минимальный удельный расход топлива соответствует не стехиометрическому составу смеси (od 1), а обедненной смеси, причем в режиме эффективного обеднения он равен ge gtntfHi , .Т- е. при экономичность снижается. SVo снижение равно приблизительно 6% и отражено значением g geM««i
Следовательно, применение трехкомпонентного каталитического нейтрализатора всегда приводит к ухудшению экономичности двигателя.
Если применить рециркуляцию отработавших газов, т. е. разбавление рабочей смеси этими газами (кривая б), то при определенной интенсивности рециркуляции и соответствующей коррекции угла опережения зажигания можно добиться частичной компенсации ухудшения экономичности (приблизительно на 3%), обеспечив минимальную при величину удельного расхода топлива на всех скоростных режимах ge Это соответствует режиму эффективного разбавления смеси отработавшими газами.
Предлагаемый способ является сочетанием двух способов, реализуемых на всех скоростных режимах двумя системами регулирования, связанными между собой опорным уровнем нестабильности врашения, при воздействии на третью систему - систему зажигания.
Одна из систем поддерживает состояние объекта регулирования на линии А (фиг. 1), система стабилизации ), другая - на линии В (система регулирования рециркуляции при коррекции угла опережения зажигания). При совместном регулировании двумя системами состояние объекта регулирования отражается точкой С. В системе стабилизации вырабатывают командный сигнал, в системе регулирования рециркуляции - управляющий.
Процесс стабилизации стехиометрической смеси, т. е. поддержания « 1, основан на том, что специальным датчиком, например кислородным, анализируют состав отработавших газов. Если состав этих газов отличается от состава, соответствующего стехиометрическому составу смеси, то датчик вырабатывает напряжение, на основе которого формируется командный сигнал, воздействующий на орган регулирования топливоподачи, например на электромагнитный клапан жиклера карбюратора. Командный сигнал так воздействует на состав смеси, что последний стремится к стехиометрическому. Таким образом, анализируют состав отработавших газов и в случае его отклонения от состава, соответствующего стехиометрической смеси, вырабатывают для его восстановления командный сигнал, которым в совокупности с управляющим сигналом воздействуют на топливодачу и количество рециркулируемых отработавших газов, причем командным сигналом воздействуют на
орган управления топливоподачей, а управляющим - на орган управления количеством рециркулируемых отработавших газов.
Регулирование рециркуляции основано на том, что величина нестабильности вращения вала двигателя Д зависит от степени рециркуляции отработавших газов при данном а и данном угле опережения зажигания в. Задача заключается в том, чтобы регулированием рециркуляции обеспечить режим эффективного разбавления смеси при стехиометрическом составе, т. е. обеспечить соблюдение условия ge ёе.някг при а 1 и при наличии оптимального угла опережения зажигания 0 Qonr.-R.
Для того, чтобы добиться выполнения 5 этого условия в процессе эксплуатации обеспечивают его выполнение в процессе эксперимента и при этом, например, получают семейство зависимостей Д(Р) при разных фиксированных значениях частоты вращения 0 «i; «2; лз при а 1, 0 вопт.-К и ge geMKHa (в)
Эти зависимости реализуют в соответствующем постоянном запоминающем устройстве системы регулирования и по ним определяют по текущим значениям п я Р ту 5 величину нестабильности, при которой выполняется заданное требование к двигателю, т. е. ge geHHHa при а 1 и Q 9опт-К- Эта величина является опорным уровнем нестабильности Аоп и соответствует определенному количеству рециркулируе мых отработавших газов, обеспечивающему выполнение заданных условий.
Текущее значение нестабильности 4 поддерживают регулированием рециркуляции вблизи опорного уровня, обеспечивая, тем самым, выполнение заданных требований. При помощи штриховых линий (фиг. 2) показаны построения, поясняющие определение опорного уровня нестабильности Аоп (g) по текущим значениям Л и Р (г) и зависимостям А(Р) (в). Для упрощения построе0 НИИ все исходные зависимости изображены прямыми линиями, хотя реально их форма может оказаться достаточно сложной. На графике е показано изменение количества отработавших газов Сц% в процентах от общего количества отработавших газов во 5 времени в соответствии с опорным уровнем нестабильности.
Определение опорного уровня нестабильности Аоп поясняется следующим образом. Точкой 1 отмечено начало отсчета времени в процессе регулирования. В промежуток времени между точками 1 и 2 нагрузка Р двигателя уменьщается, между точками 2-4 сохраняется постоянной, между точками 4-12 возрастает. Частота вращения вала в промежуток времени между точками 1-3 сохраняется постоянной и равной п п, между точками 3-б она уменьщается, между точками 6 и 7 сохраняется постоянной и равной п nz, между точками 7 и 8 увеличивается, между точками 8-11 уменьшается и между точками 11 и 12 сохраняется постоянной и равной п пзДля определения опорного уровня Доп производятся следующие построения.
В момент времени, отмеченный точкой 1, частота вращения вала равна п п. Поэтому значение Р, имеющее место в этот момент, проектируется на ту зависимость из семейства A(I), которая получена при д п (точка 1; график а). Из точки 1 опускают перпендикуляр на ось А и полученное значение с горизонтальной оси Д на графике а переносят на вертикальную ось Д на графике g. Затем из этой точки проводят горизонтальную щтриховую линию, а из точки 1 - вертикальную. Их пересечение, отмеченное точкой 1, является величиной опорного уровня нестабильности в момент времени, отмеченный точкой 1.
Подобные же построения производят в моменты времени, отмеченные точками 2, 3, 6, 7, 11 и 12 и при помощи соответствующих точек 2, 3, 6,- 7, П и 12 получают значения опорного уровня нестабильности 2, 3, 6, 7, И и 12 на графике g.
Построения, осуществленные в моменты времени, отмеченные точками 4, 5, 8 и 9, характерны тем, что в эти моменты текущая частота вращения вала не равна ни одному из фиксированных значений, при которых построены зависимости семейства Д(Р) на графике а, и иллюстрируют тот факт, что из семейства зависимостей Д(Р) используют зависимость, полученную при том фиксированном значении п, которое ближе к текущему значению частоты вращения. При определении опорного уровня Доп в указанные моменты времени может быть применен и другой метод, например, метод интерполяции.
Текущее значение нестабильности Д; получают следующим образом.
Определяют ускорение вращения вала в каждом рабочем цикле двигателя и разность между ускорениями за два очередных соседних цикла, причем из больщего значения вычитают меньщее. Последнее связано с тем, что опорный уровень нестабильности, с которым сравнивается ее текущее значение Д/, является положительной величиной.
Для получения управляющего сигнала измеряют разность между текущим значением и опорным уровнем нестабильности Д/ -- Доп (график g), который является сигналом ошибки в системе регулирования. Этот сигнал преобразуют в управляющий сигнал, поступающий на исполнительный элемент регулятора рециркуляции, воздействующий на орган регулирования рециркуляции, которым, в частности, может быть клапан с электрическим дискретным управлением.
Воздействие производится таким образом, что изменение количества рециркулируемых отработавших газов приводит к уменьшению сигнала ошибки, т. е. текущая нестабильность Д, стремится к опорному уровню Доп, соответствующему выполнению условия ge gewHHa при а 1 и 8 бопт-К Рассмотренный процесс регулирования рециркуляции показывает, что измеряют нагрузку двигателя и частоту вращения вала, определяют опорный уровень нестабильности, измеряют разность между текущим значением и опорным уровнем нестабильности, вырабатывают по этой разности управляющий сигнал на ее устранение. Значение нестабильности вычисляют как разность величин, определяемых в течение двух соседних временных интервалов. При этом в качестве временного интервала принимают продолжительность рабочего цикла двигателя, определяют ускорение вращения вала в каждом рабочем цикле и в качестве разности величин, определяемых в теQ чение двух соседних рабочих циклов, принимают разность полученных ускорений. Принятая мера нестабильности вращения позволяет при вычислении нестабильности устранить влияние регулярного изменения частоты вращения вала не неустановившихся скоростных режимах, а также сравнительно низкочастотных циклических колебаний частоты вращения, наблюдаемых в установившихся скоростных режимах. Кроме того, уменьшается влияние на качество регулирования неисправности одного из цилиндров многоцилиндрового двигателя.
При принятой мере нестабильности, разность величин, определяемых в течение двух соседних циклов, равна в соответствии с фиг. 3:
.i+LrL i
Ti
Ti
+ 1
;+2
Дп,
Лп,
Sni+iSni
t±fii I/ Oflj-H
i+i
),
ir) -IT (.
Tj+г Tifi . Tt+i
где Т,1 и T,-f2 - продолжительность соседних рабочих циклов;
Дп, и Д«;+| - приращение частоты вращения соответственно за цикль ;
Т/4-1 и - обусловленное регулярными изменениями;
б/г;ибп,+|- нерегулярные приращения частоты вращения соответственно за циклы TI+I и Т|+2 обусловленные нестабильностью вращения.
При линейном изменении частоты вращения первая скобка обращается в нуль и поэтому разность величин, определяемых в течение двух соседних циклов, является нестабильностью и равна
Д бпу.| Ьт
Ti+2 Ti-tt
В общем случае изменение частоты вращения не является линейным. Типичные из71
менения отображаются, например, кривой разгона, которая приближенно изображена на фиг. 4. Эту кривую можно аппроксимировать отрезками прямых, как показано на примере отрезков, соединяющих точки 13 -и 15 и 14 и 16. Каждый из этих отрезков охватывает участки двух соседних циклов, на протяжении которых производят вычисление нестабильности. На этих участках изменения частоты вращения можно считать линейными и в связи с этим можно пользоваться последней формулой,
Правомерность указанной аппроксимации всей кривой разгона подтверждается следующими соображениями. Ориентировочное время разгона автомобильного двигателя от 1000 об/мин до 6600 об./мин на одной передаче можно принять равным 5 с.
Среднее число оборотов вала равно 3800 об. об./с. Следовательно, за время разгона осуществляется 315 оборотов, т. е. 157 рабочих циклов или приблизительно 78 пар циклов. Таким образом, кривая разгона (фиг. 4) аппроксимируется 78 отрезками прямых, что вполне достаточно для принятого допущения.
Для того, чтобы экономичность при рециркуляции отработавших газов повышалась до таких значений, когда удельный расход топлива достигает минимальных величин gg geHHHj осуществляют коррекцию угла опережения зажигания с учетом количества рециркулируемых отработавших газов, поддерживая его на уровне оптимального значения 9 вопт R - При этом о количестве рециркулируемых отработавших газов можно судить, например, по опорному уровню нестабильности или по величине управляющего сигнала.
На упрощенной функциональной схеме (фиг. 5) изображены следующие элементы: кислородный датчик 17 состава отработавших газов, блок 18 формирования командного сигнала, исполнительный элемент регулятора стабилизатора стехиометрического состава смеси 19, орган регулирования топливоподачи, например карбюратор 20 с электронным управлением, двигатель 21, датчик 22 нагрузки (разрежения), датчик 23 частоты вращения коленчатого вала, датчик 24 верхней мертвой точки (ВМТ). блок 25 формирования опорного уровня нестабильности, блок 26 вычисления текущей нестабильности, блок 27 формирования управляющего сигнала, исполнительный элемент регулятора рециркуляции 28, орган 29 регулирования рециркуляции (клапан рециркуляции) и блок 30 коррекции угла опережения зажигания.
Датчик 17 состава отработавших газов фиксирует парциальное давление кислорода в отработавших газах, соответствующее стехиометрическому составу смеси, и, в случае нарущения указанного соответствия, выраба37038
тывает сигнал обратной связи в замкнутой системе регулирования топливоподачи, который в блоке 18 формируется как командный сигнал. Последний поступает на исполнительный элемент регулятора стабилизатора стехиометрического состава смеси 19, непосредственно воздействующего на орган регулирования топливоподачи в данном случае на карбюратор 20 с электронным управлением.
10 Таким образом, производят анализ состава отработавших газов и в случае его отклонения от состава, соответствующего стехиометрической смеси, вырабатывают для его восстановления командный сигнал, которым в совокупности с управляющим
15
сигналом воздействуют на топливоподачу
и количество рециркулируемых отработавших газов, причем командным сигналом воздействуют на орган управления топливоподачей, а управляющим - на орган уп2Q равления количеством рециркулируемых отработавших газов.
В блоке 25 формирования опорного уровня нестабильности и входящем в его состав постоянном запоминающем устройстве реализовано семейство зависимостей Д(Р),
25 полученных при разных фиксированных значениях частоты вращения вала п и при соблюдении условия ge ge.MKH2 при а 1 и 0 Qonr-R- По этим зависимостям для каждого текущего значения нагрузки Р и частоты вращения л, поступающих в блок 25
0 с датчиков 22 и 23 соответственно определяют опорный уровень нестабильности Доц (фиг. 2). Таким образом, измеряют нагрузку двигателя и частоту вращения вала и определяют опорный уровень нестабильности.
При помощи датчика 24 ВМТ производят измерение каждого временного интервала, т. е. продолжительности каждого рабочего цикла двигателя, причем сигналы с этого датчика используются через один. Информация о продолжительности рабочих циклов поступает как в блок 25 формирования опорного уровня нестабильности, так и в блок 26 вычисления текущей нестабильности.
В этом блоке, на который также поступают данные с датчика 23, для вычисления текущего значения нестабильности производят фиксацию частоты вращения в начале каждого рабочего цикла, вычисляют разность частот, полученных в результате
- соседних измерений, и делят ее на продолжительность соответствующего рабочего цикла, получая ускорение вращения вала в каждом рабочем цикле, и затем вычисляют разность между двумя соседними ускорениями, вычитая из больщего значения
5 меньшее, что и является текущим значением нестабильности. Таким образом, при вычислении текущего значения нестабильности определяют ускорение вращения вала
в каждом рабочем цикле и в качестве разности величин, определяемых в течение двух соседних рабочих циклов, принимают разность полученных ускорений.
Вычисленное текущее значение нестабильности поступает на один из входов блока 27 формирования управляющего сигнала, на второй вход которого поступает опорный уровень нестабильности с блока 25.
В блоке 27 происходит сравнение текущего значения нестабильности А/ с опорным уровнем АОП, т. е. производят измерение разности между текущим значением и опорным уровнем нестабильности, на основе чего вырабатывают управляющий сигнал определенной формы, например импульсный сигнал определенной скважности. Этот сигнал поступает на исполнительный элемент регулятора рециркуляции 28, представляющий собой, например, электромагнит клапана рециркуляции, являющегося органом 29 регулирования. При этом количество рецир --1
Р-.п
8-Вдпт.1к ify
.г
)(|
кулируемых отработавших газов в процентах от всего количества отработавщих газов Gr% меняется так, что при а 1 и Q Qom-R текущее значение нестабильности А/ стремится к опорному уровню A«i,a значение удельного расхода топлива g стремится к geHJUfa . Следовательно, управляющий сигнал действует на устранение разности между текущим значением и опорным уровнем нестабильности.
Угол опережения зажигания 0 корректируется при помощи сигнала, формируемого в блоке 30 коррекции, на который, кроме управляющего сигнала, . поступают также сигналы с датчиков 22 нагрузки и частоты вращения вала 23. Коррекция
угла опережения в блоке 30 производится с учетом количества рециркулируемых отработавших газов.
Использование способа позволит снизить токсичность отработавших газов и повысить экономичность двигателя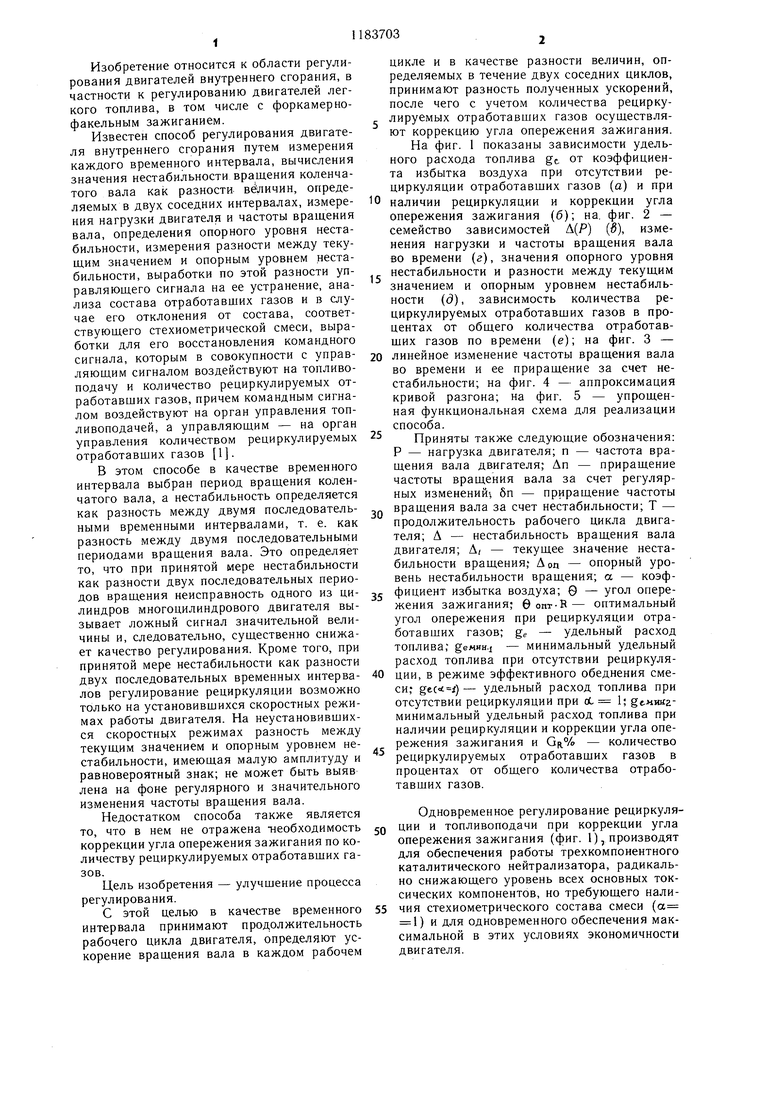
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования двигателя внутреннего сгорания с рециркуляцией отработавших газов | 1980 |
|
SU1260548A2 |
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1204765A1 |
| Способ регулирования карбюраторного двигателя внутреннего сгорания | 1980 |
|
SU939801A1 |
| Способ регулирования параметров двигателя внутреннего сгорания | 1979 |
|
SU1218163A1 |
| Способ определения нестабильности вращения двигателя внутреннего сгорания | 1982 |
|
SU1099663A1 |
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1982 |
|
SU1252523A1 |
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1280162A1 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2017 |
|
RU2706893C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2017 |
|
RU2702821C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ С РАЗВЕТВЛЕННОЙ ВЫПУСКНОЙ СИСТЕМОЙ | 2017 |
|
RU2706170C2 |
СПОСОБ РЕГУЛИРОВАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ путем измерения каждого временного интервала, вычисления значения нестабильности вращения коленчатого вала как разности величин, определяемых в двух соседних интервалах, измерения нагрузки двигателя и частоты вращения вала, определения опорного уровня нестабильности, измерения разности между текущим значением и опорным уровнем нестабильности, выработки по этой разности управляющего сигнала на ее устранение, анализа состава отработавщих газов и в случае его отклонения от состава, соответствующего стехиометрической смеси, выработки для его восстановления командного сигнала, которым в совокупности с управляющим сигналом воздействуют на топливоподачу и количество рециркулируемых отработавщих газов, причем командным сигналом воздействуют на орган управления топливоподачей, а управляющим - на орган управления количеством рециркулируемых отработавщих газов, отличающийся тем, что, с целью улучщения процесса регулирования, в качестве временного интервала принимают продолжительность рабочего цикла двигателя, определяют ускорение вращения вала в каждом рабочем цикле и в качестве разности величин, определяемых в течение двух соседних рабочих циклов. Принимают (Л разность полученных ускорений, после чего с учетом количества рециркулируемых отработавщих газов осуществляют коррекцию угла опережения зажигания. enuHz jSfH/H, 00 00 о со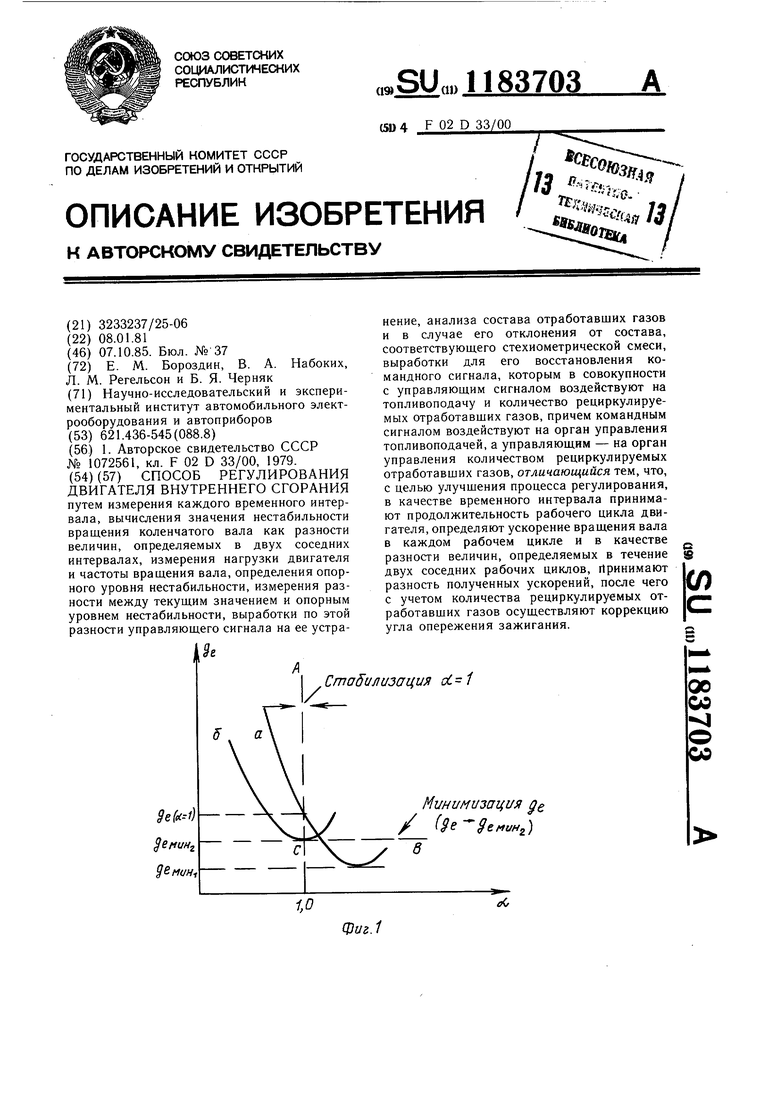
MVH6600и
WOO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1072561, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
