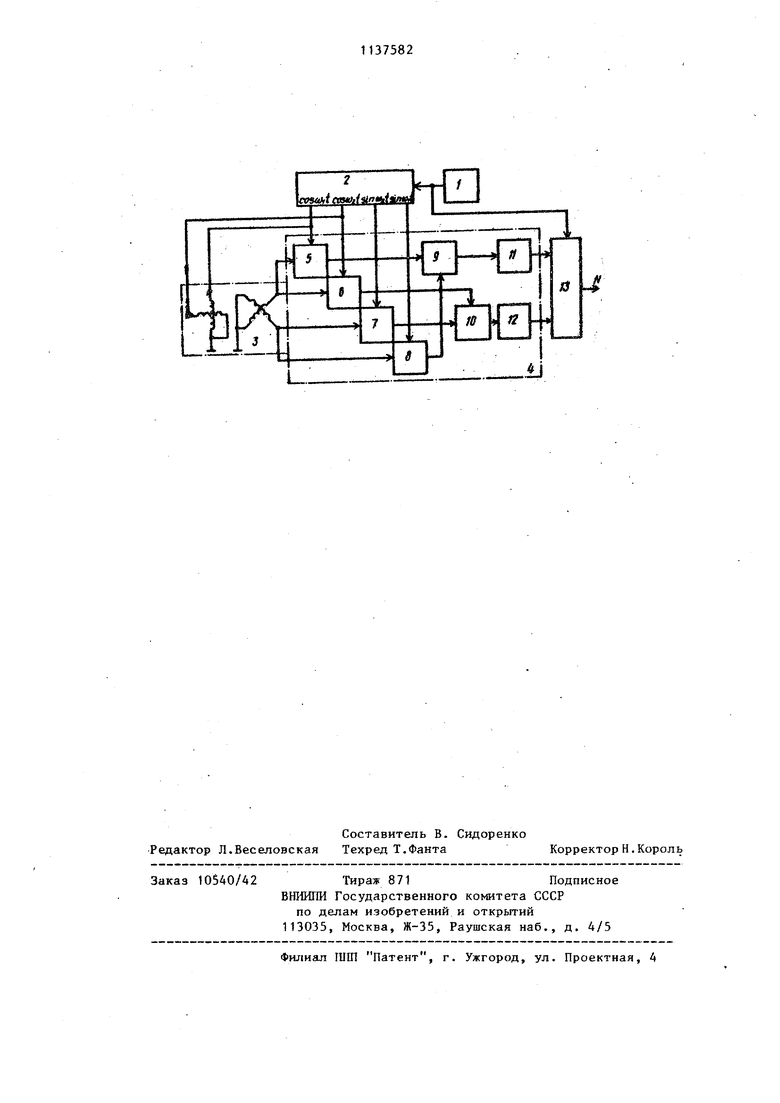
1 Изобретение относится к информационно-измерительным и управляющим системам с применением цифровых вычислительных машин. Известен способ преобразования угловых перемещений в код, основанный на формировании двух переменных напряжений питания синусно-косинусного датчика, сдвинутых друг относи тельно друга по фазе на 90 , преобразовании напряжений питания в два сигнала, фаза одного из которых отн сительно первого напряжения питания равна угловому перемещению, а фаза второго сигнала относительно первог напряжения питания равна сумме 90 и угловому перемещению, и преобразовании фазы одного из сигналов в код l. Наиболее близким,к предложенному по техническому решению является способ преобразования угловых перем щений, основанный на формировании первого и второго сигналов одной частоты, сдвинутых один относительно другого по фазе на 90°, третьего и четвертого сигналов другой частоты, сдвинутых один относительн другого на 90, формировании первог и второго напряжений питания синусн косинусного датчика, причем первое напряжение питания формируют из первого сигнала, преобразовании пер вого и второго напряжений питания . в пятый и шестой сигналы, зависящие от углового перемещения, формировании первого и второго модулированных сигналов, их суммировании и выделении из суммарного сигнала опорного сигнала, частота которого равна разности между одной и другой частотами, формировании третьего и четвертого модулированных сигнало путем модулирования пятого и шестого сигналов третьим и четвертым сигналами, их суммировании и выделении из суммарного сигнала информационного сигнала, частота которог равна разности между о/(ной и другой частотами, а его фаза относительно опорного сигнала пропорциональна угловому перемещению, преобразовании фазы информационного сигналав код, второе напряжение питания формируется из второго сигнала, а первый и второй модулированные сигн пы получают путем модулирования первого и второго сигналов третьим 2.2 и четвертым сигналами соответственно 2.Недостатком известного способа является недостаточная линейность преобразования углового перемещения в .код. Цель изобретения - повышение линейности преобразования. Поставленная цель достигается тем, что согласно способу преобразования угловых перемещений в код, основанному на формировании первого и второго сигналов одной частоты, сдвинутых один относит(гльно другого по фазе на 90 , третьего и четвертого сигналов другой частоты, сдвинутых один относительно другого на 90 , формировании первого и второго напряжений питания синусно-косинусного датчика, причем первое напряжение питания формируют из первого сигнала, преобразовании первого и второго напряжений питания в пятый и шестой сигналы, функционально зависимые от углового перемещения, формировании первого и второго модулированных сигналов, их суммировании и выделении из суммарного сигнала опорного сигнала, частота которого равна разности между одной и другой частотами, формировании третьего и четвертого модулированных сигналов путем модулирования пятого и шестого сигналов третьим и четвертым сигналами, их суммировании и выделении из суммарного сигнала информационного сигнала, частота которого равна разности между одной и другой частотами, а его фаза относительно опорного сигнала пропорциональна угловому перемещению, преобразовании фазы информационного сигнала в код, второе напряжение питания формируют из третьего сигнала, а формирование первого и второго модулированных сигналов осуществляют модулированием пятого и шестого сигналов первым и вторым сигналами. На чертеже приведена функциональная схема устройства, реализукнцего способ преобразования перемещения в код. Устройство содержит задающий генератор 1, блок 2 делителей частоты, синусно-косинусный вращающийся трансформатор (СКВТ) 3, блок 4 выделения фазомодулированных сигналов, состоящий, например, из бло ков 5-8 умножения, сумматоров 9 и 10 и фильтров 11 и 12 разностной частоты, блок 13 преобразования фазы в код. Устройство работает следующим образом. С помощью блока 2 делителей час тоты из высокочастотных колебаний задающего генератора 1 получаются два квадратурных периодических сиг нала частот W, и cOj, , (Со, 2), которые используются для питания статорных обмоток возбуждения СКВТ напряжениями с частотами оз, и Ug и вьщеления фазомодулированных сиг налов разностной частоты. В резуль тате на выходных обмотках СКВТ 3 будут напряжения: U2E(k,co5co,tcoeoi + kjco6a)2t einoi), (k,cos(0,t Sinut-kzCoeWji coeci,), где k, , kj - коэффициенты трансформации синуснокосинусного датчика 3 на частотах У, и Q1, В блоках 5-8 сигнал (Jg. умножается на co5W(i и coewit a сигнал Ul - на gin u,t и 5in Wjt , а на их входах получаем напряжения ,.U5- Ug;-, Og-U coswii-Ujkjcosnteinoi, U6«U,co500ii U k,co6S7t Gosut, UT и sb cOjt - и k, яt 5;n 00, UgUjsJn oJzt-U kz.nsi-tcosot, и,-Ш2 .Напряжения U и llg суммируются в сумматоре 9, а напря жения и6 и и - в сумматоре 10. Фильтры 11 и 12 разностной частоты препятствуют прохождений на их выход составляюпщх входных сигналов с частотами, отличными от П. 824 . : В результате на входах блока 13 преобразования разности фаз в код присутствуют сигналы: U,,(ai+e.), и,2 k, co5()) а выходной код преобразователя равен.. Ng Если принять во внимание, что отличия взаимного расположения обмоток статора и ротора от 90° составляют S и 8р соответственно, то выходной код с точностью до членов второго порядка малости равенHe 2u4 + Sc-Sp-)0. Как видно из этого выражения, малые отклонения осей статорных и роторных обмоток от 90 с точностью до членов второго порядка малости вносят погрешности, не приводящие к нарушению линейности преобразования. Можно показать, что погрешность от ряда других несовершенств синусно-косинусного датчика 3 в первом приближении также не приводит к нарушению линейности преобразования, например, от малой магнитной асимметрии, вызванной эллипсностью расточек статора или ротора, различного рода эксцентриситетами, погрешности от неравенства параметров статорных или роторных цепей, электромагнитной асимметрии и т.п. Кроме того, при достаточных . добротностях фильтров 11 и 12 разностной частоты запитывать синуснокосинусный датчик 3 можно прямоугольными напряжениями, а также прямоугольные напряжения можно использовать в качестве модулирующих, что ведет к упрощению реализации способа и повьппению линейности преобразования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования угловых перемещений в код | 1983 |
|
SU1135010A1 |
| Способ преобразования угла поворота вала в код | 1984 |
|
SU1226668A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Способ преобразования перемещения в код | 1982 |
|
SU1136314A1 |
| Преобразователь перемещений в код | 1986 |
|
SU1367158A1 |
| Преобразователь угол-временной интервал | 1984 |
|
SU1166307A1 |
| Способ преобразования перемещения в код и устройство для его осуществления | 1984 |
|
SU1269260A1 |
| Интерполятор для измерительных преобразователей перемещения | 1978 |
|
SU748445A1 |
| СПОСОБЫ И УСТРОЙСТВА ПОВЫШЕНИЯ ИНДЕКСА УГЛОВОЙ МОДУЛЯЦИИ | 2012 |
|
RU2493646C2 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНР1Й В КОД, основанный на формировании первого и второго сигналов одной частоты, сдвинутых один относительно другого ло фазе на 90°, третьего и четвертого сигналов другой частоты, сдвинутых один относительно другого на 90 , формировании первого и второго напряжений питания синусно-косинусного датчика, причем первое напряжение питания формируют из первого сигнала, преобразовании первого и второго напряжений питания в пятый и шестой сигналы, функционально зависимые от углового перемещения, формировании первого и второго модулированных сигналов, их суммировании и выделении из суммарного сигнала опорного, сигнала, частота которого равна разности между одной и другой частотами, формировании третьего, и четвертого модулированных сигналов путем модулирования пятого и шестого сигналов третьим и четвертым сигналами, их суммировании и вьзделении из суммарного сигнала информационного сигнала, частота которого равна разности между одной и другой частотами, а его фаза относительно опорного сигнала пропорциональна (Л угловому перемещению, преобразовании фазы информационного сигнала в код, отличающийся тем, что, с целью повышения линей-ia ности преобразования, второе напряжение питания формируют из третьего сигнала, а формирование первого DO и второго модулированных сигналов осуществляют модулированием пятого сл х и шестого сигналов первым и вторым сигналами. N9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зверев А.Е | |||
| и др | |||
| Преобразователи угловых перемещений в цифровой код | |||
| Л., Энергия, 1974, с | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Преобразователь "перемещение-код | 1974 |
|
SU485482A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
