Изобретение относится к автоматизации производственных процессов черной и цветной металлургии и предназначено для измерения положения в пространстве узлов механизмов, совершающих возвратно-поступательное перемещение на значительное (до нескольких метров) расстояние, например, штанг печных толкателей методических печей станов горячей прокатки.
Известно устройство для измерения положения механизма, которое содержит кодовый датчик положения, сочлененный с валом электродвигателя, вращающего нажимной механизм через редуктор 1.
Недостатком данного устройства является сложность схемы ввиду необходимости значительного числа преобразований, вызванных особенностями способа измереиня.
Известно устройство для измерения перемощения объекта содержащее реостатный преобразователь, первый ролик, установленный на реостатном преобразователе, струну, закрепленную одним концом на ролике, а другим на контролируемом объекте, пружину, создающую натяжение струны. На неподвижном основании щарнирно установлена качалка с возможностью поворота на оси относительно основания. На качалке неподвижно закреплены реостатный преобразователь и дополнительный второй ролик, установленный соосно с первым, на котором закреплен один конец тросика. Другой его конец закреплен на подвижной базе, на которой размещен контролируемый объект. Пружина связывает качалку с неподвижным основанием и создает натяжение тросика 2.
Недостатками указанного устройства яв. яются малый диапазон измерения, определяемый параметрами пружины, и снижение точности и надежности нри длительной эксплуатации.
Наиболее близким по технической сущности к предлагаемому является датчик линейных перемещений, состоящий нз реостатного преобразователя, контакты которого включены в электрическую измерительную схему, ролика, гибкой нити, электродвигателя с закрепленным на его валу барабаном, винтовой пары. Винтовая пара состоит из винта с укрепленным на нем роликом и гайки, на которой укреплен подвижной контакт реостата. Гибкая нить, например струна, присоединяется к детали механизма, движение которой измеряется, обматывается 1-2 раза вокруг ролика и присоединяется к барабану. Электродвигатель, на валу которого установлен барабан, создает момент постоянного знака, натягивающий нить 3.
Недостатками известного устройства являются возможность проскальзывания нити по ролику, наличие люфта в паре винт-гайка
и недостаточная надежность подвижного контакта реохорда, что приводит к неточности измерения ввиду возникновения погрещности преобразования величины линейного перемещения детали в аналоговый сигнал. Кроме того, величина постоянного момента, создаваемого двигателем устройства, должна быть достаточной для вращения винтовой пары, что приводит к перегрузке указанного двигателя, находящегося длительное время в заторможенном состоянии, следовательно, снижает надежность устройства.
Цель изобретения - повыщение точноти измерения и надежности устройства.
Указанная цель достигается тем, что устройст о для измерения Величины линейных перемещений объекта, содержащее двигатель с расположенным на его валу барабаном для размещения тросика, другой конец которого соединен с контролируемым
объектом, схему управления и индикатор, снабжено бесконтактным цифровым датчиком числа оборотов, расположенным соосно с барабаном, реверсивным счетчиком и схемой запуска двигателя устройства, выход
которой соединен с двигателем, а входы - с схемой управления, к которой подсоединен один вход реверсивного счетчика, другой вход которого соединен с датчиком числа оборотов, а выход -. с индикатором. При этом схема запуска двигателя устройства включает последовательно соединенные два элемента ИЛИ, элемент И, причем первый вход первого элемента ИЛИ подсоединен ; выходу схемы управления двигателем, первый вход элемента И соединен с элементом задержки времени и первым входом второго элемента ИЛИ, который подсоединен к второму выходу схемы управления двигателем, а второй вход элемента И подсоединен к выходу первого элемента ИЛИ, являющегося выходом схемы
запуска двигателя.
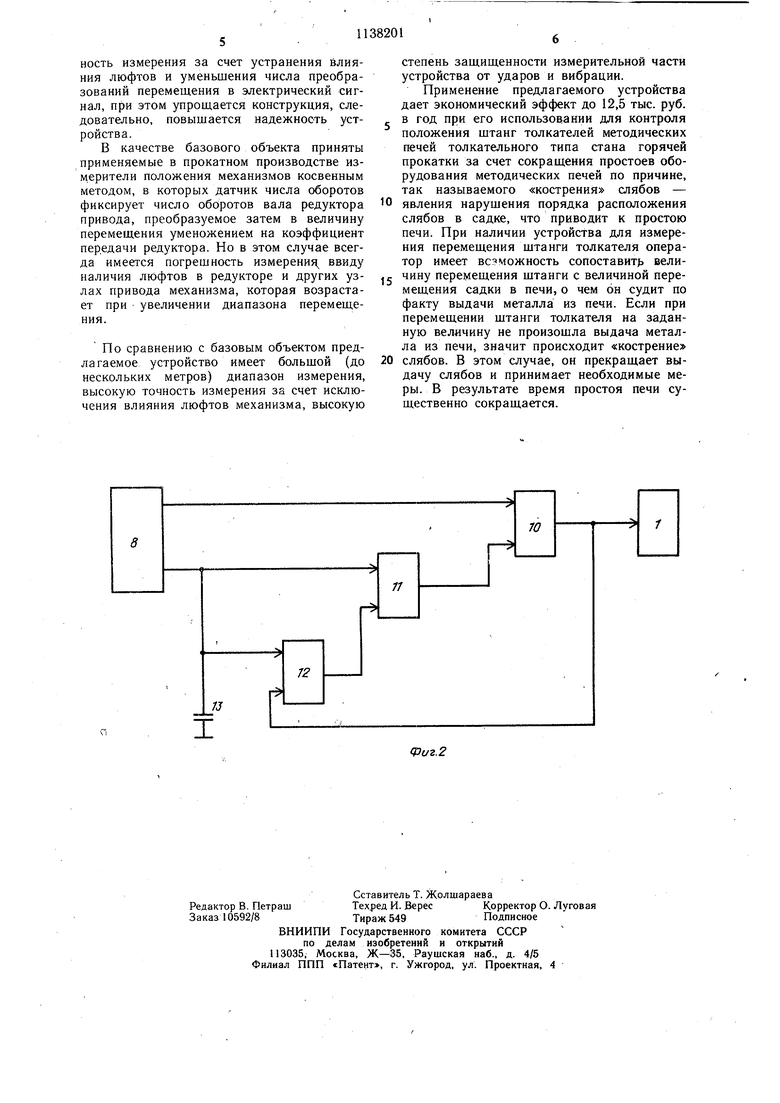
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - схема запуска двигателя устройства.
Устройство состоит из двигателя 1, на валу которого закреплен барабан 2 с размещенным на нем тросиком 3. Соосно с барабаном закреплен бесконтактный цифровой датчик 4 числа оборотов, последовательно соединенный с реверсивным счетчиком 5 и блоком 6 индикации. Двигатель 1 подсоединен к схе.ме 7 запуска, первый и второй входы которой соединены с соответствующими выходами схемы 8 управления контролируемым объектом 9, к которому прикреплен второй конец тросика 3. При этом третий выход схемы 8 управления соединен
с входом реверсивного счетчика 5.
Схема 7 запуска двигателя 1 содержит последовательно соединенные элементы ИЛИ 10, ИЛИ И и И 12. Первый вход
элемента ИЛИ 10 подсоединен к выходу схемы 8 управления, вход э::1л.ч:-нта И 12 соединен с элементом 13 задержки времени и первым входом элемента ИЛИ 11„ который подсоединен к второму выходу схемы 8 управления, а второй вход элемента И 12 подсоединен к выходу элемента ИЛИ 10, являющемуся выходом схемы 7 запуска.
Устройство работает следующим образом.
Включение устройства осуществляется посредством схемы 7 запуска по сигналу, снимаемому с одного из двух выходов схемы 8 управления объектом. После включения устройства двигатель 1 создает момент постоянного знака, который путем вращения барабана 2 натягивает тросик 3 с требуемым усилием и остается в заторможенном состоянии. При поступательном движении объекта 9, например, вперед под воздействием развиваемых усилий тросик 3 вращает барабан 2, одновременно разматываясь на длину перемещения объекта 9, При этом реверсивный счетчик 5 производит подсчет импульсов, поступающих с бесконтактного датчика 4 в режиме суммирования. При поступательном движении объекта 9 назад барабан 2 вращается в обратном направлении (в соответствии с приложенным моментом) и наматывает тросик 3, поддерживая тем самым требуемое усилие натяжения так, что длина выбранной части тросика 3 остается все время равной длине перемещения объекта. В этом случае реверсивный счетчик 5 производит подсчет импульсов с бесконтактного датчика 4 в режиме вычитания.
Изменение направления счета в реверсивном счетчике 5 производится схемой управления 8 объектом. Информация о налич|1и перемещения объекта 9 отображается блоком 6 индикации.
Объект 9, перемещение которого измеряется, например щтанга толкателя методических печей, приводится в действие периодически: либо при необходимости выдать из печи очередной сляб, либо подготовить сляб к загрузке в печь. Это определяет два варианта работы схемы запуска.
В первом случае подается предварительный сигнал с выхода схемы 8 управления на первый вход элемента ИЛИ 10 схемы 7 запуска, который приводит в действие двигатель 1 устройства.
Во втором случае сигнал включения объекта 9 с второго выхода схемы 8 управления подается на первый вход элемента ИЛИ 11, затем на второй вход элемента ИЛИ 10 и с выхода последнего на включение двигателя 1. Одновременно сигнал, идущий на вход элемента ИЛИ 11, заряжает включенный на первом входе элемента И конденсатор 13, который нужен для задержки отключения двигателя 1 при остановке объекта
9. На второй вход элемента И 12 поступает сигнал с выхода элемента ИЛИ 10, образуя обратную связь. И, пока есть сигнализатор на обоих входах элемента И 12, присутствует напряжение на выходе схемы 7 запуска и двигатель 1 .включен.
После окончания заданного цикла движения объекта 9 от схемы 8 упра -.ления на входе схемы 7 запуска сигнал отсутствует. Элемент 13 задержки времени сохраняет уровень логической единицы на первом входе элемента И 12 и поддерживает включенное состояние двигателя 1 устройства на время, определяемое временем разряда элемента 13, т. е. на заданное время после отключения двигателя объекта 9, что необходимо для повыщения точности измерения.
После разряда конденсатора 13 напряжение на входе 1 элемента И 12 снижается до уровня «О, что соответствует отсутст0вию сигнала на выходе схемы запуска. Двигатель 1 устройства отключается, а схема запуска 7 возвращается в исходное состояние.
Двигатель 1 может быть пневматическим, гидравлическим, электрическим. При применении пневматического или гидравлического двигателя величина статического момента вращения определяется выбранным значением давления рабочей среды.
При применении электрического двигателя используется так называемый затормо0женный режим работы. Известно, что указанный режим характеризуется наличием у заторможенного двигателя вращающего момента требуемой величины, но менее номинального значения, при этом нагрев об5моток двигателя не превышает допустимой величины.
Чтобы обеспечить работу электродвигателя в заторможенном режи.ме, напряжение питания выбирают согласно соотношению
0
и
RI
н
где 1я -ток в обмотке двигателя при номинальной механической нагруз5„ке и номинальной скорости вращения, А;
R - активное сопротивление обмотки
двигателя. Ом.
Уменьшение напряжения сети до требуемого значения достигается известными
0 способами. Как видно, в предлагаемом устройстве защита двигателя от перегрузок достигается применением известного заторможенного режима работы двигателей и ограничением времени включенного состояния двигателей.
5
По сравнению с известными предлагаемое устройство для измерения линейных перемещений имеет более высокую точность измерения за счет устранения влияния люфтов и уменьшения числа преобразований перемещения в электрический сигнал, при этом упрощается конструкция, следовательно, повыщается надежность устройства.
В качестве базового объекта приняты применяемые в прокатном производстве измерители положения механизмов косвенным методом, в которых датчик числа оборотов фиксирует число оборотов вала редуктора привода, преобразуемое затем в величину перемещения уменожением на коэффициент передачи редуктора. Но в этом случае всегда имеется погрешность измерения ввиду наличия люфтов в редукторе и других узлах привода механизма, которая возрастает при увеличении диапазона перемещения.
По сравнению с базовым объектом предлагаемое устройство имеет больщой (до нескольких метров) диапазон измерения, высокую точность измерения за счет исключения влияния люфтов механизма, высокую
степень защищенности измерительной части устройства от ударов и вибрации.
Применение предлагаемого устройства дает экономический эффект до 12,5 тыс. руб. в год при его использовании для контроля положения щтанг толкателей методических печей толкательного типа стана горячей прокатки за счет сокращения простоев оборудования методических печей по причине, так называемого «кострения слябов -
явления нарушения порядка расположения слябов в садке, что приводит к простою печи. При наличии устройства для измерения перемещения щтанги толкателя оператор имеет возможность сопоставит) величину перемещения щтанги с величиной перемещения садки в печи, о чем он судит по факту выдачи металла из печи. Если при перемещении щтанги толкателя на заданную величину не произощла выдача металла из печи, значит происходит «кострение
слябов. В этом случае, он прекращает выдачу слябов и принимает необходимые меры. В результате время простоя печи существенно сокращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1973 |
|
SU392365A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Гидроэлектрическое устройство для измерения ширины сляба | 1981 |
|
SU1021942A1 |
| Цифровой ротационный вискозиметр | 1982 |
|
SU1105785A1 |
| Устройство для измерения приведенной скорости вращения вала газотурбинного двигателя | 1980 |
|
SU917087A1 |
| Устройство для управления перемещением металла в толкательной методической печи | 1981 |
|
SU1030413A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU327964A1 |
| Устройство для намотки нити на бобину | 1991 |
|
SU1770245A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ В ПЕЧАХ | 1970 |
|
SU275538A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
1. УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА, содержащее двигатель с расположенным на его валу барабаном для размещения тросика, другой конец которого соединен с контролируемым объектом, схему управления и индикатор, отличающееся тем, что, с целью повыщения точности измерения и надежности устройства, оно снабжено датчиком числа оборотов, реверсивным счетчиком и схемой запуска двигателя устройства, выход которой соединен с двигателем, а входы - со схемой управления, к которой подсоединен один вход реверсивного счетчика, другой вход которого соединен с датчиком числа оборотов, а выход - с индикатором. 2. Устройство по п. I,,отличающееся тем, что схема запуска двигателя устройства выполнена из последовательно соединенных двух элементов ИЛИ и элемента И, причем первый вход первого элемента ИЛИ подсоединен к выходу схемы управления двигателем, первый вход элемента И соединен с элементом задержки времени и первым- входом второго элемента ИЛИ, кото Л рый подсоединен к второму выходу схемы управления двигателем, а второй вход элеС мента И подсоединен к выходу .первого элемента ИЛИ, являющегося выходом схемы запуска двигателя. со 00 to
| I | |||
| Устройство для измерения положения механизма | 1980 |
|
SU876225A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
