1I
Изобретение относится к области
автоматизации производственных процессов и может быть использовано в различных Системах управления перемещением объекта,например, в системах управления перемещением подвижных элементов промьшшенных роботов и вспомогательного оборудования робототехнических комплексовj а также системах управления перемещением кислородной фурмы в конверторах.
Известно счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом, содержащее последовательно соединенные генератор импульсов, счетчик i-змпульсов и блок задания исходных состояний реверсивных счетчиков;, 2К реверсивных счетчиков, счетные входы которых объединены и подключены к импульсному датчику перемещения, информационные установочные входы реверсивных счетчиков соединены с выходами блока задания исходных состояний реверсивных счетчиков, 2К блоков сравнения, первые входы которых объединены и подключены к выходу блока ввода программЫг вторые входы блоков сравнения соединены с выходами реверсивных счетчиков соответственно, а выходы блоков сравнения подключены к логическому блоку, соединенному с исполнительным органом . ,
Недостатком устройства является относительная сложность его схемной .реализации.
Наиболее близким техническим решвнием к изобретению является устройство для программного зп равления объектом с К-ступенчатым остановом, содержащее 2К реверсивных импульсов, подключенных счетчньг и входами к выходу, датчика перемещения, а установочными входами - к соответствующим выходам блока задания исходных дангньпс, блок ввода, соединенньй информационными выходами с первыми входами блока сравнения, (2К 1)-каналь ный распределитель ш ульсовэ подключенный тактовым входом к выходу генератора импульсов, установочным входом - к управляющему выходу блока ввода, а выходами, начиная с перво-: го, - к соЪтветствующим управляющим входам коммутатора, соединенного информационньми входами с выходами реверси-вных счетчиков импульсов, а выходами - с вторыми входами блока сравнения, подключенного первым и
08332
вторым выходами к первым входам со- ответственно первого и второго элементов И, связанных выходами через элемент ИЛИ-НЕ с управляющим входом генератора импульсов и соответственно с вторым и третьим входами исполнительного элемента, а вторыми входами - с выходами соответственно первого и второго элементов ИЛИ,
Q подключенных входами к выходам распределителя импульсов соответственно от первого по К-й канальные выходы и от (к + l)-ro по 2К-Й кaнaльньte выходы zj . .
, Недостатком известного устройства является относительная сложность его схемной реализацииS так как для построения устройства с многоступенчатым (К-ступенчатым) остановом требуется 2К реверсивных счетчиков и коммутатор.
Целью изобретения является упрощение и повьппение надежности устройства
Поставленная цель достигается тем, что в устройство для программного управления объектом с К-,ступенчатым остановом;, содержащее датчик перемещения, подключенный первым и вторым выходами с.оответственно к суммирукщему и к вычитающему входам реверсивного счетчика .импульЬов, блок сравнения 5 соединенный первым и вторым выходами с первыми входами соот5 ветственно первого и второго элементов И, подключенных выходами к соответствующие управляющим входам исполнительного элемента и к входам элемента ИЛИ-НЕ, а вторыми входами - к
выходам соответственно первого и второго элементов ИЛИ, связанных входами соответственно с первы1-1И и вторыми выходами (2К -ь l) ступенчатого . распределителя импульсов, подключенного установочным входом к управляющему выходу блока ввода, а тактовым входом к выходу генератора импульсов, соединенного управляющим входом с выходом элемента ИЛИ-НЕ,
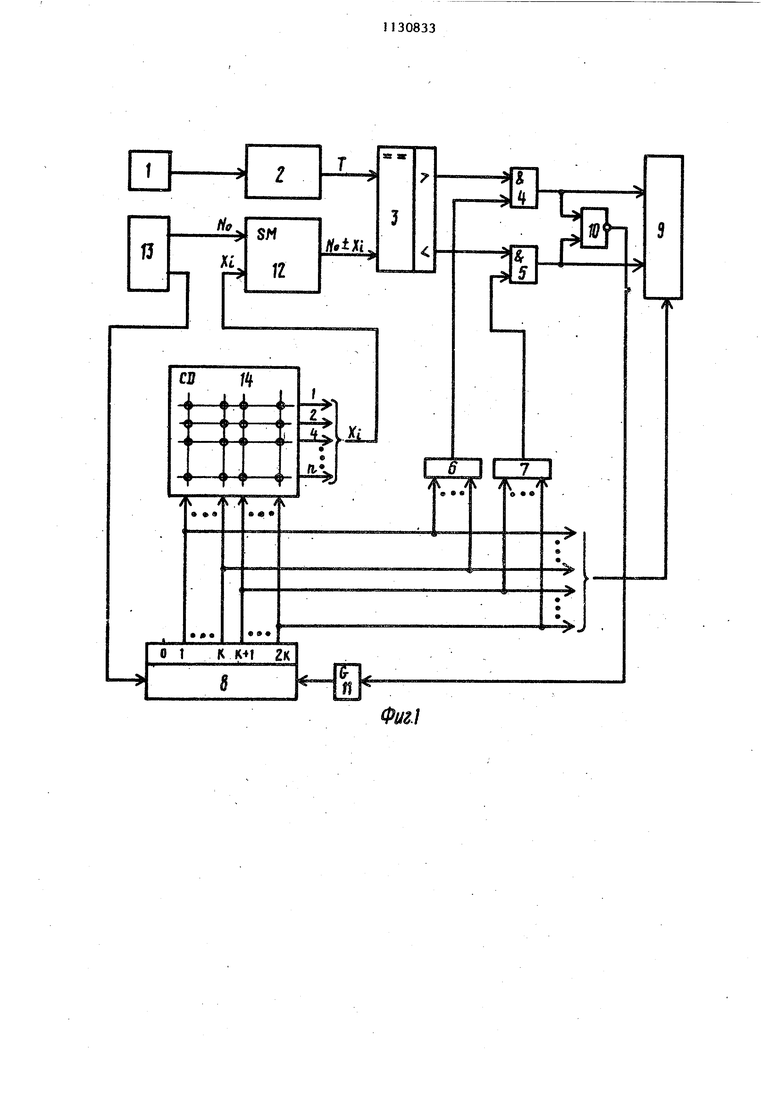
сумг-затор и шифратор, подключенный входами соответственно к первым и вторым выходам (2К + Г) ступенчатого распределителя, импульсов, а выхода-. ми - к первым входам йумматора, соедине ного вторыми входами с информа.ционкым выходом блока ввода, а выходом - с первым входом блока сравнения j подклдачеиного BTopb i входом к 3 -ц выходу реверсивного счетчика импульсов. На фиг. 1 дана блок-схема предлагаемого устройства; на фиг. 2 - зоны действия команд управления устройства К-ступенчатого останова. Устройство содержит датчик 1 перемещения, реверсивный счетчик 2 импульсов, блок 3 сравнения, первый и второй элементы И 4 и 5, первый и второй элементы ИЛИ 6 и 7, .распределитель 8 импульсов, исполнительный элемент (привод) 9, элемент ИЛИНЕ 10; генератор 11 импульсов, сумматор 12, блок 13 ввода, шифратор 14 В качестве импульсного датчика 1 перемещения может быть использован любой известный датчик со схемой формирования импульсов на шинах (-}) и (-) в зависимости от направления перемещения -объекта. Блок 3 сравнения предназна11ен для сравнения п - разрядного кода N, +Xj (N -Х) поступающего с выхода, сумматора 12 с п -разрядньм кодом Т, поступающим с выходов реверсивного счетчика 2, где N - координата точки останова .объекта (фиг. 2); X- число, соответствующее расстоянию от заданной точки останова до точки, в которой производится перевод со скорости V на скорость V. j Т - координата текущего положения подвижного объекта. При T Wo-t- X;CT No-X.) сигнал 1 присутствует на первом выходе (Боль ше) блока 3 сравнения, а при Т i NP + X; (Т t NO -. Х-) сигнал 1 присутствует на втором выходе (Мень ..блока 3 сравнения. Т2К + 1) - канальный распределитель 8 имеет.(2К + 1) выход и может представлять собой, например, любой известный счетчик, имеющий (2К + 1) устойчивых состояний, к выходам триг геров которого подключен дешифратор с (2К + 1) выходами (О,1,2...,2К). Нулевой выход распределителя не используется. Поступление импульсов н тактовый вход распределителя при на личии на его установочном входе сиг нала 1 приводит к последователь ному пробегу сигнала 1 на его выходах (от 0-го до 2К-го, снова от 0-го до 2К-ГО и т.д). В случае наличия сигнала О на установочном входе распределителя, на нулевом 334 выходе распределителя присутствует сигнал 1 а на всех остальных выходах распределителя присутствуют сигналы О независимо от поступления импульсов на тактовый вход распределителя , Исполнительный элемент 9 .(например, привод) выдает соответствующее управляющее воздействие на объект управления, если на выходе элемента И4 или на выходе элемента И5) присутствует сигнал I (что является длявертикального перемещения объекта командой Спуск или соответственно командой Подъем) и если сиг-нал 1 присутствует на одном из выходов (2К - 1) - канального распределителя (кроме 0-го выхода), что определяет величину перемещения. Сумматор 12 представляет собой любой из известных сумматоров комбинационного типа и выполняет непрерывное суммирование кода координаты заданной точки останова (N), поступающего с информационных выходов блока 13 ввода на первые входы- сумматора 12, и коды числа XJ , соответ-; ствующего расстоянию от заданной точки останова до точки, в которой про-, изводится перевод со скорости V на скорость . поступающего с информационных выходов шифратора 14 на вторые входы сумматора 12, причем для точек N.j,..,N , расположенных над точкой останова N (фиг. 2), к коду координаты точки останова N прибавляется код соответствующего числа Х,,...,Х, а для точек N,, расположенных под точкой останова N , из кода координаты точки останова N вычитается код соответствующего числа Xjj. ,.., . Это обеспечивается тем, что на вторые входы сумматора 12 числа X ,. .. ,Х с шифратора 14 поступают в прямом двоичном коде, а число Х|. .... в обратном двоичном коде с добавлением 1. Шифратор 14 можрт представлять собой двухмерную координатную матРИДУ, содержащую 2К вертикальных шин (шин выборки) и горизонтальных шин (информационных кодовых шин) . Уста-., новкой, например, диодов, в соответствующих узлах координатной сетки, образованных пересечением ( -ой вертикальной айны (i -ой шины выборки) с горизонтальными информационными шинами, кодируется число Х|, причем ,... Д осуществляется в прямом двоичном коде, а кодирование чисел Х,, ,.,,,Х/ в обратном двоичном коде с добавлением 1. Это обеспечивает в сумматоре 12 сум шрование дляточек N расположенных выше точки остановам и вычитание NQ - X; для точек N., , ...,N2, расположенных ниже точки останова Ng, Устройство работает следующим образом. Объект неподвижен и находится например, в точке Т Сфиг-.З); при этом содержимое реверсивного счетчика 2 однозначно соответствует коду текущего положения объекта (коду точки TQ) . Задание точки останова (ввод программы) пока еще не производилось т.е. как на информационных, так и на управляющем выходах блока 13 присутствуют сигналы О. Сигнал 1 при сутствует на нулевом выходе распределителя 8. На все входы исполнитель ного элемента 9 поступают сигналы О, т.е. на объект управления никакого воздействия не оказывается. Затем производится ввод программы Код задаваемой точки останова NQ поступает с информационных выходов блока 13 ввода на первые входы тора 12. На управляющем выходе блока 13 ввода сигнал О меняется на 1, в результате чего импульс, поступающий с выхода генератора 11 на тактовый вход распределителя 8, переводит последний из нулевого положения в единичное (на 1-м выходе распределителя 8 появляется сигнал 1, на всех других выходах - сигна.лы О). Единичный сигнал с 1-го выхода распределителя 8 постзтает на первую шину выборки шифратора 14, в результате чего на выходе (информационных шинах) шифратора 14 формируется п разрядный прямой двоичный код чисг ла Х, поступающий на вторые входы сумматора 12. При,этом на выходах сумматора 12 имеем код суммы (N -Х ) который сравнивается в блоке 3 сравнения с кодом текущего положения объекта (Т). Если Т NQ + , имеем команду Спуск на скорости V, (сигнал 1 присутствует на выходе элемента И 4 и на I-м выходе распределителя 8)« При этом на выходе элемента ИЛИ-НЕ 10 присутствует сигнал О, что влечет остановку генератора 11 импульсов. Если Т не больше, чем N + X, , то следующий импульс, поступивший с выхода генератора 11 на тактовьй вход распределителя 8, переводит последний во второе положение (сигнал присутствует уже на выходе распределителя). Блок 3 сравнения уже сравнивает Т с N + Х„. Пока сигнал 1 присутствует а 2-м выходе распределителя 8 (фиг.1), то (если UiiK) сигнал 1 посту-, пает с выхода элемента ИЛИ 6 на вход элемента И 4. Если при этом код текущего положения объекта Т N,, + Х, то на обоих входах элемента И 4 имеем сигналы 1, что ведет к наличию сигнала 1 на выходе элемента И 4 (команда Спуск) . Если сигнал 1 присутствует на л м выходе распределителя 8 (при этом ) то сигнал 1 поступает с выхода элемента ИЖ 7 на вход элемента И 5. Если при этом код текущего положения объекта -X, то на обоих входах элемента И 5 имеем сигналы 1, что ведет к наличию сигнала 1 на выходе И 5 (команда Подъем). Пока сигнал 1 поступает наодин из входов элемента ИЛИ-НЕ 10, с выхода этого элемента поступает на вход генератора 11 сигнал О, запрещаю-:щий работу генератора 11 . Таким образом, наличие, например, команды Спуск приводит к спуску объекта управления на скорости, номинал которого определяется номером i-ro выхода (1 i i К) распределителя 8, на котором присутствует в этот момент сигнал 1. Спуск на скорое-. ти V производится до тех пор, пока +Х-. В момент прохода объекта мимо точки N j N(j + X код текущего положения Tj , находящийся вреверсивном счетчика 2, принимает знатов. .. Сиг., N.N X. чение N нал 1 исчезает на выходе Больше блока 3 сравнения, что приводит к -. появлению сигнала О на выходе элемента И 4 (на выходе элемента И 5 уже присутствует сиг1йал О, так как ), Появление сигнала 1 на выходе элемента ИЛИ-НЕ 10 приводит к запуску генератора 1. Поступление импульса с выхода генератора 1I на тактовый вход распределителя 8 приводит к переходу в распределитель 8 сигнала 1 с выхода t на выход i + i,. Если , то(ввиду того, что T:7N + Xj,. ), снова появляется команJ.,i« да Спуск, но уже на скорости V В момент, когда объект (фиг. 2) проходит вниз мимо точки Нц (точка отключения двигателя с упреждением при спуске) неравенство + X сменяется на равенство Т N + Х и затем вследствие движения - на неравенство Х). Объект входит в зону останова, в которой . Эта зона характерна тем, что пока объект управления находится в ее пре делах, ни на выходе элемента И 4, ни на выходе элемента И 5 сигнал 1 не появляется. Это объясняется тем, что в этой зоне Т NQ + Хц при . и T,N.o- Х при К + Uii:2K. Таким образом, если объект находится в зоне останова, то в виду того, что ни одна из схем совпадения на элементах И 4 и 5 не собирается независимо от положения распределителя В, отсутствует команда на движение . Если при спуске объект проскочит зону останова, т.е. опустится ниже ТОЧКИ Ni2vi то происходит возврат объекта в зону останова по следующим причинам. В момент, когда объект спустился в зону останова, нет уже команды Спуск и нет еще команды Подъем. Вследствие этого наличие сигнала Ч на выходе элемента ИЛИ-НЕ 10 разрешает генератору- 11 формировать им пульсы, поступление которых на тактовый вход распределителя 8 приводит к последовательному пробегу сигнала 1 на выходах распределителя 8 (к, К -f 1,...,2К, 0,1,2,...,К,К , ... ,2К, 0,1 ,. .. и т.д.) . Если в момент, когда объект по какой-то причине все же по инерции выходит за пределы зоны останова Гт.е. спускается ниже точки Н , а распределитель 8 имеет сигнал I на i -ом своем выходе (ic2K),TO будет иметь место последовательный пробег сигнала 1 с вы хода -го на 2К-й выход распредели теля 8. В момент, когда сигнал 1 появится на 2К-м выходе распределит ля 8, блок 3 сравнения начинает сра кивать код текущего положения объекта Т, поступающий с выходов реверсивного счетчгаса 2, и код точки Nj Njj - Xjj, , поступающий с выходов сумматора 12. Так как в этот момент T Ng-Xji (т.е. сигнал 1 на выходе Меньше блока 3 сравнения и есть сигнал 1 на выходе элемента-ИЛИ 7, то на выходе элемента И 5 появг-яется сигнал 1 (команда Подъем) и осуществляется подъем на скорости V . При этом, так как на выходе элемента ИЛИ-НЕ JО имеется сигнал О, генератор 11 оказывается заторможенным. При подъеме объекта (возврат в зону останова) в момент прохода. мимо точки точка отключения двигателя с упреждением при подъеме) неравенство -Xj сменяется на равенство T NQ-X2j. и затем вследствие движения - на неравенство -Xj,,. В результате команда Подъем исчезает, так как на выходе Меньше блока 3 сравнения сигнал 1 сменяется на О. С этого момента генератор 11 заставляет распре-. делитель 8 менять свое положение,но пока объект находится в зоне останова, исполнительный орган 9 не оказывает управляющего воздействия на объект управления, т.е. двигатель отключеч- в этом случае с упреядением при подъеме, Предлагаемое устройство, имея простой алгоритм работы, позволяет помимо многоступенчатого останова производить реверс перемещения объекта в случае его случайного выбега за пределы зоны останова, а также позволяет вводить новое задание и во время перемещения объекта. По сравнению с известньм устройством, имеющим 2К реверсивных счетчиков по схеме задания исходных состояний, предлагаемое устройство имеет только один реверсивный счетчик. Поэтому схемная реализация комбинационного сумматораи шифратора на основе диодной матрицы проще, чем реализация (2К - 1) реверсивных счетчиков, коммутатора кодов и блока задания исходных состояний реверсивных счетчиков в известном устройст следовательно, предлагаемое устройство является более простым, чем известное.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Устройство для контроля мажоритарных схем | 1977 |
|
SU705451A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Устройство для контроля мажоритарных схем | 1983 |
|
SU1117643A1 |
| Устройство для преобразования координат | 1980 |
|
SU898426A1 |

УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ОБЪЕКТОМ С К-СТУПЕНЧАТЫМ ОСТАНОВОМ, содержащее датчик перемещения, подлюченный первым и вторым выходами соответственно к суммирующему и к вычитающему входам реверсивного сче.тчика импульсов, блок сравнения, соединенный первым и вторым выходами с первыми входами соответственно первого и второго элементов И, подключенных выходами к соответствующим управляющим входам исполнительного элемента и к входам элемента ИЛИ-НЕ, а вторыми входами - к выходам соответственно первого и второго элементов ИЛИ, связанных входами соответственно с первыми и вторыми выходами 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| , 2 | |||
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
