Изобретение относится к области гидроавтоматизации поршневого привода обеих створок ворот и затворов наполнения (опорожнения) шлюза и может быть использовано в механическом оборудовании гидросооружений, в частности для гидропривода низконапорного шлюза.
Целью изобретения является повышение надежности и эффективности управления работой гидроприводов и увеличение пропускной способности шлюза путем оптимизации динамического режима работы гидроприводов.
На фиг.1 приведена электрогидравлическая схема устройства управления гидроприводами створок ворот и затворов наполнения (опорожнения) шлюза; на фиг.2 показана конструкция механизма синхронизации движения штоков гидроцилиндров привода затворов наполнения (опорожне- ния) шлюза.
Гидропривод створок ворот и затворов наполнения шлюза включает шесть гидроцилиндров 1-6, два из которых 1 и 6 шарнирно соединены своими штоками со створками 7 и 8 двустворчатых ворот, а гйдроцилиндры 2,3 и 4,5 своими штоками соединены с затворами наполнения (опорожнения) 9 и 10, перекрывающими окна в створках 7 и 8 двустворчатых ворот.
Поршневые и штоковые полости гидроцилиндров 1 и 2,3 левой (на фиг, 1) створки ворот соединены соответственно с исполнительными полостями 11 и 12 электрогидравлического усилителя 13 (левый на фиг.1) через распределители 14 и 15 с электромагнитным управлением (левого на фиг.1). Поршневые и штоковые полости гидроцилиндров 4 и 5,6 правой створки ворот соединены соответственно с исполни- тельными полостями 11 и 12 правого (на фиг.1) электрогидравлического усилителя (ЭГУ) 13 через правые (на фиг.1) распределители 14 и 15 с электромагнитным управлением. Полости питания 16 каждого электрогидравлического усилителя 13 подключены каждая через фильтры 17 обратные клапаны 18 к напЪрным гидролизам двух нерегулируемых насосов 19, параллельно которым подключены также гидро- клапаны давления 20 и полости управления 21 электрогидравлических усилителей 13 через фильтры 22. Золотник каждого электрогидравлического усилителя 13 снабжен центрирующими пружинами 23, которые обеспечивают установку золотника в сред- нее (нулевое) положение при остановке насоса 19.
Распределители с электромагнитным управлением 14 и 15 выполнены по стандар- тной схеме. При обеспеченных электромагнитах, под действием пружин, их золотники находятся в верхнем положении и сообщают исполнительные полости 11 и 12 электрогидравлических усилителей 13 со штоковой и поршневыми полостями гидроцилиндров 2,3 и 4,5 соответственно. Рабочие полости гидроцилиндров 1 и 6 при этом заперты При включении (подача тока в обмотки) электромагнитов распределителей 14 и 15 обе полости гидроцилиндров 2,3 и 4,5 запираются, а поршневые и штоковые полости гидроцилиндров 1 и 6 сообщаются с исполнительными полостями 11 и 12 электрогидравлических усилителей 13.
Предохранительный блок каждого гидроцилиндра 1 и 6 состоит из четырех обратных клапанов 24, 25, 26 и 27, включенных попарно-параллельно между поршневой и штоковой полостями гидроцилиндров 1 и 6, и предохранительного клапана 28, подключенного между обратными клапанами 24, 25 таким образом, что запирает гидролинию первой пары обратных клапанов 24 и 25, установленных по направлению потока рабочей жидкости, поступающей в полости гидроцилиндра 1 и 6, а сливная гидролиния клапана 28 подключена в гидролинию между второй парой противофазно установленных клапанов 26 и 27.
Датчик положения каждой створки 7 и 8 ворот состоит из двух сельсинов 29 и 30, валы которых механически соединены с валами цилиндрического редуктора 31, входной вал которого механически соединен с осью вращения створки 7 и 8.
Трехфазные выходные обмотки сельсинов 29 и 30 подключены к общепромышленной сети через понижающий трансформатор, а однофазные входные обмотки сельсинов 29 и 30 подключены ко входу измерительного устройства 32 диспетчерского пункта управления, на котором установлены также дисплей 33, и контроллер 34.
Дисплейный пульт оператора 33 и выходы измерителтного устройства 32 электрически подключены к выходу микропроцессорного контроллера 34, выходы которого подключены к широтно-импульсным модуляторам (ШИМ) 35 и согласующему устройству 36. Выходы ШИМ 35 подключены к входам электронных усилителей 37 через широтно-импульсные преобразователи (ШИПр)38. Выходы электронных усилителей 37 подключены к электромеханическим преобразователям электрогидравлических усилителей 13,
Выходы согласующего устройства 36 подключены к пускателям электродвигателей нсосов 19 и к электромагнитам обмоток управления 14, 15.
В устройстве применена аппаратура и элементы, серийно выпускаемые отечественной промышленностью. Так, в качестве насоса 19 применен шестеренчатый нерегулируемый насос типа БГ-11-24, электрогидравлический усилитель 13 выпускается в крмплекте с электронным усилителем 37 Харьковским опытным заводом РКБ Тепло- автомат.
Датчик пути выполнен в виде двух стандартных сельсинов 29 и 30 (например, БД- 501А). Один сельсин 29 подключен к редуктору 31 таким образом, что делает один оборот за полный ход створки 7,8 а сельсин 30 уточняет координату на 1/16
части хода створки (за полный ход створки делает 16 оборотов).
Измерительное устройство 32 снимает сигнал напряжения с одной из фаз трехфазной обмотки сельсинов и однофазной обмотки, замеряет сдвиг фаз между ними, который пропорционален углу поворота ротора сельсина, а, следовательно, и координате створки ворот. Результаты измерения преобразуются устройством 32 в цифровой сигнал, который поступает на вход микропроцессорного устройства 34 через канал его интерфейсной связи.
Микропроцессорный контроллер 34 представляет собой серийно выпускаемый промышленностью контролер типа К1- 20/Электроника МС 2702. Дисплейный пульт 33 оператора - серийно выпускаемый дисплей, например, ВТА 2000-15.
Система управленичя гимдроприводом створок ворт и затворов наполнения шлюза работает следующим образом.
Для обеспечения процесса шлюзования судов створки 7,8 ворот шлюза выполняют операции закрытие ворот и открытие ворот. При этом в процессе шлюзования затво- ры 9,10 наполнения (опорожнения) выполняют следующие операции:
а)на двустворчатых воротах, расположенных со стороны верхнего бьефа:
открытие затворов 9 и 10 для наполнения камеры шлюза;
закрытие затворов 9 и 10 для отсечения верхнего бьефа от камеры шлюза;
б)на двустворчатых воротах, расположенных со стороны нижнего бьефа:
открытие затворов 9 и 10 для опорожнения камеры шлюза;
закрытие затворов 9 и 10 для отсечения нижнего бьефа от камеры шлюза.
При выполнении операции закрытие ворот на дисплейном пульте 33 оператора диспетчер включает клавишу этой операции, при этом в микропроцессорном контролере 34 формируются цифровые сигналы в соответствии с поданной командой, которые с выхода контролера 34 поступают на широтно-импульсные модуляторы (ШИМ)35 и согласующее устройство 36. В модуляторах 35 цифровые сигналы преоброазуются в широтно-импульсные и поступают на входы ШИПр 38, где преобразуются в аналоговые, которые поступают нз входы электронных усилителей 37. С выходов усилителей 37 непрерывные сигналы управления поступают на электромеханические преобразователи электрогидравлических усилителей 13. Одновременно, с выхода согласующего устройства 35, сигналы напряжения подаются на пускатели электродвигателей насосов 19
и электромагниты электрогидро-распреде- лителей(ЭГР)14, 15.
Как только насосы 19 начнут подавать рабочую жидкость в напорную магистраль,
в которой установится давление, определяемое настройкой гидроклапанов давления 20, часть ее поступает через фильтры 22 полости управления 21 электрогидравлических усилителей (ЭГУ) 13. Золотники ЭГУ
0 переместятся от нулевого положения на величину, пропорциональную сигналу управления, поступившему от электронных усилителей 37. Рабочая жидкость из напорной гидролинии через обратные клапаны 18
5 и фильтры 17 поступите полости питания 16 усилителей 13 и через кромки их золотников -в исполнительные полости 12, откуда через включенные распределители 14 поступит в поршневые полости гидроцилиндров 1 и 6,
0 приводя в движение створки 7 и 8 на закрытие двустворчатых ворот с начальной заданной скоростью.
Рабочая жидкость из штоковых полостей гидроцилиндров 1 и 6 будет вытесняться че5 рез распределители 15 и исполнительные полости 11 усилителей 13 на слив через кромки средних поршней золотников усилителей 13. По мере движения створок 7 и 8 микропроцессорный контролер 34, получая ин0 формацию от датчика пути (сельсинов 29 и 30) и измерительного устройства 32,сравнивает ее с заданной программой в функции времени и выдает откорректированные сигналы управления на электрогидравлические
5 усилители 13, вызывая смещение их золотников, в результате чего регулируются расходы рабочей жидкости, поступающие в поршневые полости гидроцилиндров 1 и 6, и обеспечивается реализация запрограмми0 рованного закона перемещенимя створок 7 и 8 двустворчатых ворот, а также их синхронизация.
При достижении створками 7 и 8 ворот закрытого положения, по сигналу датчиков
5 пути (сельсинов 29 и 30) отключается контролер 34, то есть прекращается выдача сигналов в широтно-импульсные модуляторы 35 и в согласующее устройство 36. В резул ь- тате электромеханические преобразовате0 ли электрогидравлических усилителей 13, электродвигатели насосов 19 и электромагниты распределителей 14,15 обесточиваются. При этом золотники усилителей 13 устанавливаются в среднее положение под
5 воздействием пружин 23, а распределители 14 и 15 запирают рабочие полости гидроцилиндров 1 и 6. Створки 7 и 8 останавливаются и удерживаются в з акрытом поТюжейии за счет масляных подушек в поршневых полостях гидроцилиндров 1 и 6.
Операция открытие ворот производится аналогично операции закрытие ворот за тем исключением, что сигналы управления поступающие на электрогидравлические усилители 13, инвертируются, в результате чего золотники ЭГУ смещаются в противоположную сторону, обеспечивая движение створок 7 и 8 на открытие ворот.
Технология выполнения операций наполнение и опорожнение камеры шлюза одинаковы. Отличие состоит лишь в том, на каких воротах производится открытие затворов 9 и 10. Если операция производится на двустворчатых воротах, расположенных со стороны верхнего бьефа (со стороны напора воды на шлюз), то происходит наполнение камеры шлюза; если открытие затворов 9 и 10 производится на двустворчатых воротах, расположенных со стороны нижнего бьефа, то происходит опорожнение камеры шлюза.
В каждой из этих операций предусматривается несколько нелинейных графиков движения затворов, оптимальных для конкретных уровней воды в верхнем и нижнем бьефах, а также для определенных групп судов. При реализации конкретных графиков движения затворов обеспечивается ми- нимальное время наполнения или опорожнения камеры шлюза. При этом гидродинамические нагрузки, действующие на суда от потока воды, заполняющей или опорожняющей камеры шлюза, не не превышают допустимых величин, В конечном счете оптимальные графики движения затворов 9 и 10 позволяют пов-ысить пропускную способность шлюза.
При выполнении операции наполнение (опорожнение) камеры шлюза на дисплейном пульте оператора 33 диспетчер выбирает необходимый график движения затворов 9, 10, соответствующий конкретным условиям и включает клавишу этой опе- рации. При этом в Микропроцессорном контроллере 34 формируются цифровые сигналы в соответствии с поданной командой, которые с выхода контроллера 34 поступают на широтно-импульсные молуляторы (ШИМ) 35 и согласующее устройство 36. В модуляторах 35 цифровые сигналы преобразовываются в широтно-импульсные и поступают на входы устройств 38, где преобразуются в аналоговые, которые поступают на входы электронных усилителей 37,. С выходов усилителей 37 непрерывные сигналы управления поступают на электромеханические преобразователи электрогидравлических усилителей 13. Одновременно, с выхода согласующего устройства 36 сигналы напряжения подаются на пускатели электродвигателей насосов 19,
После того, как насосы 19 начнут подавать рабочую жидкость в напорную магистраль, в ней устанавливается давление, определяемой настройкой гидроклапанов давления 20. Часть рабочей жидкости поступает через фильтры 22 в полости управления 21 электрогидравлических усилителей
13, золотники которых при этом переместятся от нулевого положения на величину, пропорциональную сигналу управления, поступившему от электронных усилителей 37. Рабочая жидкость из напорной магистрали, проходя через обратные клапаны 18 и фильтры 17, поступает в полости питания 16 усилителей 13 и далее, через кромки их золотников - в исполнительные полости 11 ЭГУ, откуда, через отключенные распределители 15, поступит в штоковые полости гидроцилиндров 2,3,4,5, приводя в движение затворы 9 и 10 с начальной заданной скоростью. Рабочая жидкость из поршневых полостей гидроцилиндров 2, 3,4,5 будет
вытесняться через распределители 14 и исполнительные полости 12 усилителей 13 на слив через кромки средних поршней золотников усилителей 13, По мере движения затворов 9 и 10 микропроцессорный
контроллер 34 постоянно выдает сигнал управления на электрогидравлические усилители 13 согласно заданной программы, вызывая смещение их золотников, в результате чего регулируются расходы рабочей
жидкости, поступающие в штоковые полости гидроцилиндров 2,3, 4,5, и обеспечивается реализация запрограммированного закона перемещения затворов 9 и 10.
При достижении затворами 9 и 10 открытого положения, по сигналу конечных выключателей установленных на направляющих путях створок 7 и 8, снимается питание с контроллера 34, в результате отключаются модуляторы 35 и согласующее
устройство 36.
Золотник усилителей 13 устанавливаются под воздействием пружин в среднее положение, запирая рабочие полости гидроцилиндров 2,3,4,5. Насосы 19 останавливаются. Затворы 9 и 10 удерживаются в открытом положении за счет масляных подушек в штоковых полостях гидроцилиндров 2, 3,4, 5.
Операция закрытие затворов9 и 10 производится аналогично предыдущей операции за тем исключением, что сигналы управления, поступающие на электрогидравлические усилители 13, инвертируются, в результате чего их золотники смещаются в противоположную сторону, обеспечивая движение затворов 9 и 10 на закрытие.
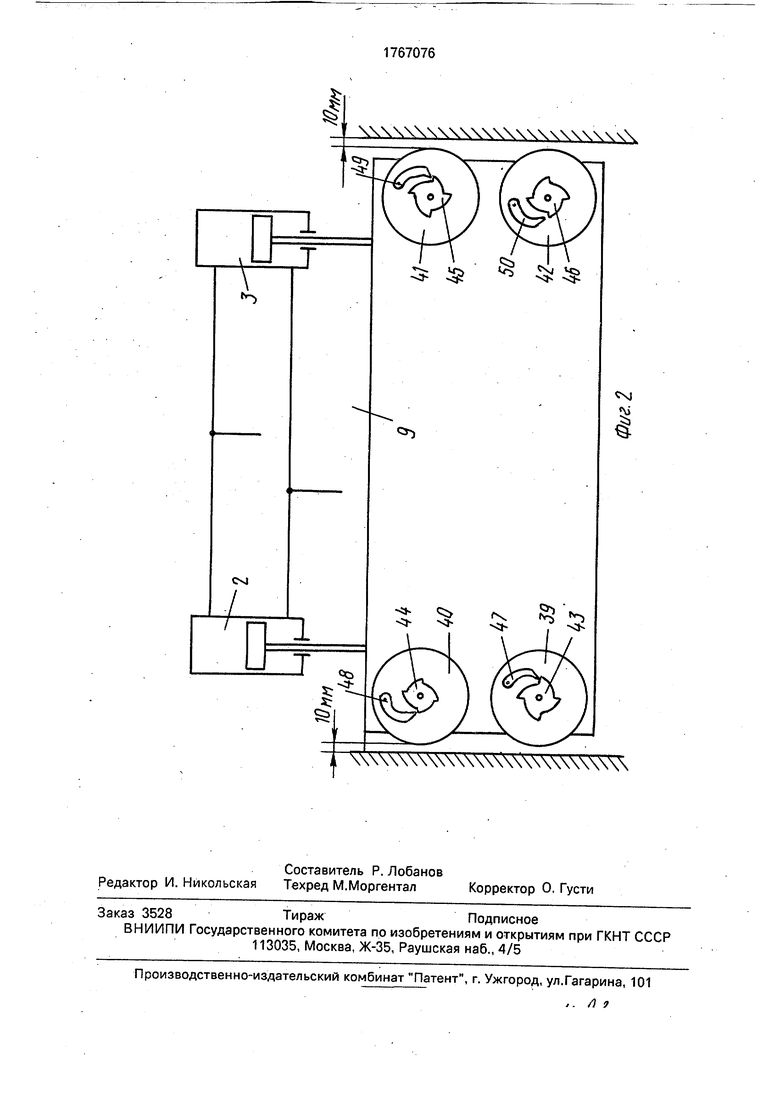
Прямоугольные затворы 9 и 10 (см.фиг.2) имеют по две точки подвеса и при их вертикальном перемещении возникает необходимость в синхронизации движения штоков гидроцилиндров 2,3,4 и 5 для предотвращения заклинивания затворов 9 и 10 в направляющих пазах. Синхронизации движения штоков гидроцилиндров затвора (например, затвора 9) осуществляется следующим образом.
На оси колес 39, 40, 41, 42, затвора 9 устанавливаются храповики 43,44, 45,46, а собачки 47, 48, 49, 50 закрепляются на металлоконструкции затвора 9. Если при движении затвора 9 вверх шток гидроцилиндра 2 станет перемещаться с большей скоростью, по сравнению со штоком гидроцилиндра 3, to произойдет перекос затвора 9, и в контакте с рабочими поверхностями пазов будут два колеса 39 и 41 затвора 9. При этом колесо 39 вращаться не будет, так как оно заторможено храповиком 43, а колесо 41 будет катиться по направляющей, так как храповой механизм установлен таким образом, что при вращении колеса 41 по часовой стрелке он не затормаживает его. При этом усилия на штоке гидроцилиндра 2 возрастает по сравнению с усилием на штоке гидроцилиндра 3. Так как штоковые полости гидроцилиндров 2 и 3 соединены между собой (см.фиг.1), то рабочая жидкость будет в большем количестве поступать в гидроцилиндр с меньшим усилием на штоке; то есть в гидроцилиндр 3. Скорость перемещения штока гидроцилиндра 3 увеличивается и произойдет выравнивание перекоса затвора 9.
Если, при движении затвора 9 вверх шток гидроцилиндра 3 (см.фиг.2) станет перемещаться с большей скоростью, по сравнению со штоком гидроцилиндра 2, то в контакте с рабочими поверхностями пазов окажутся два колеса 40 и 42 затвора 9, причем колесо 40 будет катиться по рабочей поверхности паза, а колесо 42 будет скользить по поверхности паза, так как оно заторможено храповиком 46, В результате усилие на штоке гидроцилиндра 3 возрастает и рабочая жидкость будет поступать в большем количестве в штоковую полость гидроцилиндра 2. Скорость перемещения штока гидроцилиндра 2 увеличивает и произойдет выравнивание скоростей движения штоков гидроцилиндров 2 и 3.
Прим опускании затвора 9 синхронизация движения штоков гидроцилиндров 2 и 3 (фиг.2) осуществляется аналогично. Так, например, при движении штока гидроцилиндра 2 с большей скоростью, по сравнению со штоком гидроцилиндра 3, в контакте с поверхностями направляющих пазов скажутся два колеса 40 и 42. Колесо 42 будет катиться
по рабочей поверхности паза, а колесо 40 скользить. Рабочая жидкость от насосной станции будет поступать в большем количестве в поршневую полость гидроцилиндра 3, скорость штока которого увеличится и
0 произойдет выравнивание перекоса затвора 9. При горизонтальном перемещении затвора 9 между боковым колесами 39, 40,41, 42 и рабочими поверхностями направляющих пазов имеется зазор около 10 мм.
5 При воздействии на створки 7 и 8 ворот (фиг.1) внешних нагрузок (навал судна, обратная волна и т.д.), превосходящих допустимые, в работу включается предохранительный блок. При действии нагрузки на створку 7 (8)
0 со стороны штока (слева направо по отношению к створке 7, фиг.1), давление будет повышаться в штокрвой полости гидроцилиндра 1 (6) до величины настройки предо- хранительного клапана 28, после
5 срабатывания которого рабочая жидкость из штоковой полости гидроцилиндра 1 (6) будет перетекать через обратный клапан 25 и предохранительный клапан 28 на слив. Поршень гидроцилиндра 1 (6) будет перемещать0 ся в сторону штоковой полости, а в поршневой полости будет создаваться разрежение, под действием которого обратный клапан 26 откроется и рабочая жидкость из сливной гидролинии будет заполнять увели5 чивающийся объем поршневой полости.
При воздействии внешней нагрузки на створку 7 (8) с противоположной стороны штока гидроцилиндра 1(6), справа налево по отношению к створке 7 (фиг.1), давление
0 будет повышаться в поршневой полости, из которой рабочая жидкость будет вытесняться и поступать на слив через обратный клапан 24 и предохранительный клапан 28. Штоковая полость будет подпитываться
5 из сливной гидролинии через обратный клапан 27.
В случаях расхождения створа двустворчатых ворот от внешних нагрузок, превышающих допустимые, или перетечки
0 рабочей жидкости через поршневые уплотнения при длительной нахождении ворот в закрытом положении, размыкается конечный выключатель, установленный в створе ворот (не показан на фиг.1), автоматически
5 включается микропроцессорный контроллер 34 и операция происходит аналогично операции закрытие ворот с той лишь разницей, что на электрогидравлические усилители 13 подается постоянный сигнал, соответствующий минимальной скорости
движения ворот. При створении ворот конечный выключатель замыкается, снимается питание с контроллера 34 и схема приходит в исходное состояние. При подаче команды диспетчером на открытие дву- створчатых ворот, конечный выключатель в створе ворот блокируется.
Использование изобретения позволит увеличить пропускную способность низкона- пооного шлюза в среднем на 35-40% врезуль- тате форсированного наполнения и опорожнения камеры шлюза за счет реализации нелинейных законов движения двустворчатых ворот и затворов наполнения и опорожнения, а также повысить надежность работы всех гидроприводов и обеспечить без- опасность шлюзования Безопасность шлюзования обеспечивается снижением гидродинамических нагрузок, действующих на суда от потока воды, заполняющей и опо- рожняющей камеру шлюза, что достигается регулированием потока воды заданным законом движении затворов.
Формула изобретения 1. Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза, включающая два гидроцилиндра привода створок ворот и две пары параллельно включенных гидроцилиндров приводов двух затворов напол- нения, установленных на строрках ворот шлюза, два электрогидрораспределителя, два выхода каждого из которых соединены с поршневыми полостями гидроцилиндров привода створок ворот и с поршневыми по- лостями пар гидроцилиндров привода затворов наполнения шлюза, два электрогидроусилителя, полости питания которых соединены с двумя напорными магистралями через фильтры и обратные клапаны, а одна из исполнительных полостей каждого электрогидроусилителя - с напорным входом соответствующего электрогидрораспределителя, два нерегулируемых насоса, выходы которых сое- динены с двумя напорными магистралями, а к последним подключены гидроклапаны давления и через фильтры, - полости управления электрогидроусилителей, два предохранительных блока гидроцилиндров привода створок ворот шлюза, два редуктора, каждый из которых кинематически связан с одной из створок и с двумя сельсинами, соединенными через измеритель
ное устройство с контроллером пункта управления системой, содержащего также подсоединенные к контроллеру дисплей, согласующее устройство и два широтно- импульсных модулятора, причем выходы последних через широтно-импульсные преобразователи и электронные усилители соединены с электромеханическими преобразователями электрогидравлических усилителей, а выходы согласующего устройства соединены с пускателями электродвигателей нерегулируемых насосов и с обмотками управления электрогидравлических распределителей, отличающаяся тем, что, с целью повышения быстродействия и надежности в работе гидроприводов створок ворот и затворов наполнения шлюза, система снабжена двумя дополнительными электрогидравлическими распределителями, управляющие обмотки которых соединены с дополнительными выходами согласующего устройства, два выхода каждого из дополнительных электрогидравлических распределителей соединены соответственно со штоковыми полостями гидроцилиндров приводов створок ворот и со штоковыми полостями пар гидроцилиндров приводов затворов наполнения шлюза а напорные входы - со вторыми исполнительными полостями электрогидравлических усилителей, золотники которых снабжены пружинами для обеспечения их центровки, причем каждый предохранительный блок выполнен в виде предохранительного кяапана, управляющая полость которого соединена с поршневой и штоко- вой полостями гидроцилиндров привода створок ворот через прямо включенные обратные клапаны, а сливная полость - через обратно включенные клапаны.
2. Система по п.1, отличающаяся тем, что, с целью исключения заклинивания затворов наполнения при их вертикальном перемещении, прямоугольные затворы снабжены двумя парами диагонально размещенных на их боковых поверхностях колес, установленных с зазором в вертикальных пазах створок ворот шлюза, причем все колеса снабжены храповыми механизмами, установленными с возможностью обеспечения свободного вращения первой пары колес по часовой стрелке, а второй пары колес - против часовой стрелки.
tO
г- о о г
rj/
tЈ
0Ј
Ггпф
/Ј : jnUr- ZЈM
0Ј
«- Г-
h

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
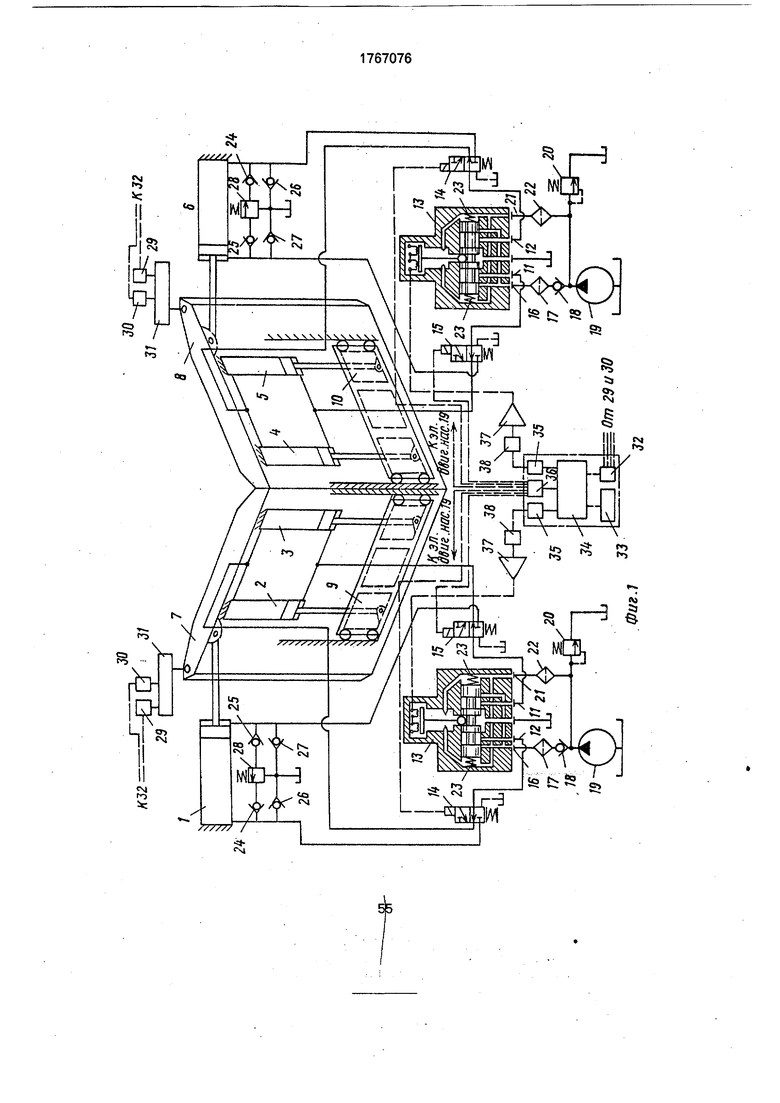
Использование: гидротехника. Сущность изобретения: система управления включаетустановленные на пункте управления контролер 3 с подключенными к нему дисплеем 33, согласующим устройством, двумя широтно-импульсными модуляторами (ШИМ), измерительным устройством. На вход последнего подаются сигналы с сельсинов о положении каждой из створок ворот. На створках 7,8 установлены затворы наполнения (опорожнения), имеющие привод от пар гидроцилиндров. Управление подачей рабочей жидкости в поршневые и штоковые полости гидроцилиндров привода створок ворот и пар гидроцилиндров приводов затворов используются электроуправ- ляемые гидрораспределители (ЭГР) (правые и левые по чертежу, соответственно для правой и левой створок ворот). Подача рабочей жидкости на напорные входы ЭГР 14, 15 от напорной магистрали с выхода нерегулируемых насосов (правого и левого) осуществляется через электрогидравлические усилители (ЭГУ), электромеханические преобразователи которых соединены с ШИМ 35 (правым и левым) через усилители и широт- но-импульсные преобразователи. Кроме того, для управления гидроприводами обмотки управления ЗГР правой и левой створок ворот соединены с контроллером через согласующее устройство, выходы которого подключены также к пускателям электродвигателей нерегулируемых насосов. Для предохранения от поломок при нагрузках на створках ворот, превышающие допустимые значения, служат предохранительные блоки, выполненные в виде предохранительных клапанов с обратными клапанами, соединяющих поршневые и штоковые полости гидроцилиндров приводов створок ворот низконапорного шлюза. 1 з.п.ф-лы, 2 ил. XI Оч vj О vj ON
Cxj
I
VA
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
