Изобретение относится к автоматическому управлению и может быть использовано в гидравлических подъемных механизмах судоходных шлюзов.
Цель изобретения - повышение надежности в работе и снижение потребляемой мощности.
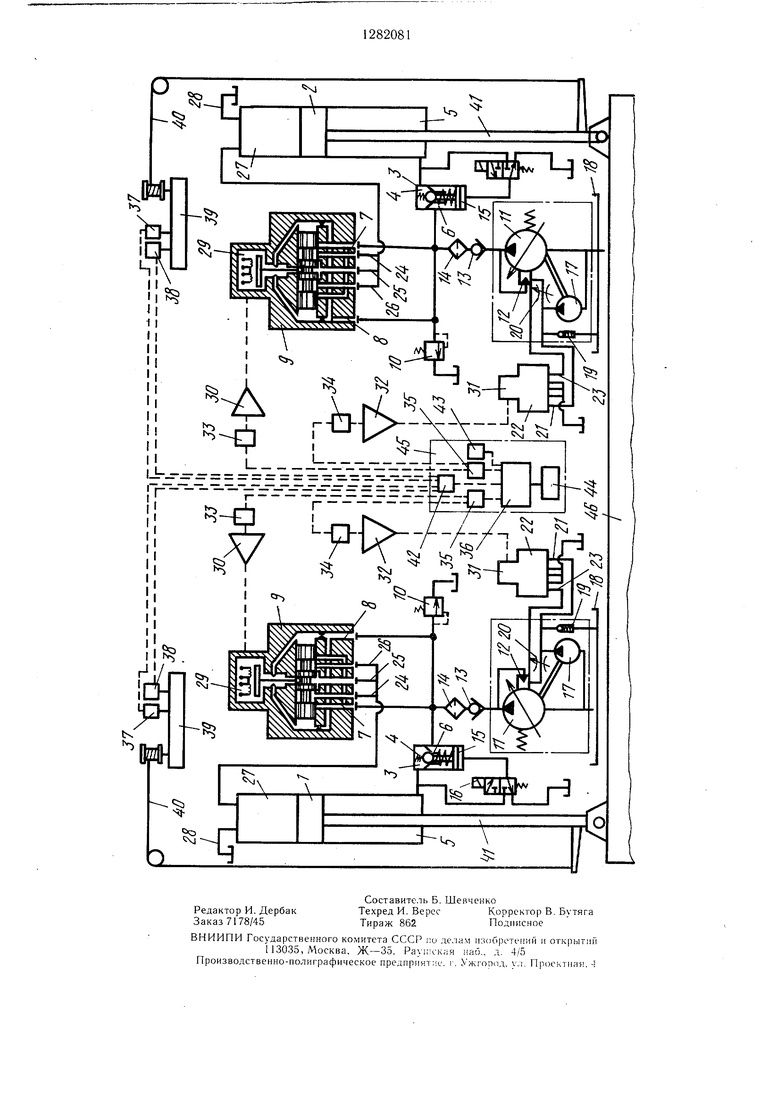
На чертеже изображена схема устройства управления гидроприводом затвора шлюза.
Гидропривод затвора шлюза включает два гидроподъемника 1 и 2. Блок управления каждым гидроподъемником содержит обратный управляемый клапан 3, надкла- панная полость 4 которого соединена гидролинией со штоковой полостью 5 гидроподъемника. Подклапанная полость 6 об- ратного управляемого клапана 3 соединена гидролиниями с полостями питания 7 и управления 8 электрогидравлического усилителя 9, предохранительным клапаном 10 и напорной гидролинией регулируемого насоса 11 с регулятором 12 мощности. В напорную гидролинию регулируемого насоса 11 подключены обратный клапан 13 и фильтр 14. Управляюш,ая полость 15 обратного управляемого клапана 3 подключена гидролинией к распределителю 16 с электромаг- нитным управлением, к которому подводится рабочая жидкость от штоковой полости 5 гидроподъемника 1 и 2. На одном валу с регулируемым насосом 11 установлен управляющий насос 17. Питание насосов 11 и 17 осуществляется от баков 18. В на- порной гидролинии управляющего насоса 17 установлен предохранительный клапан 19 и регулируемый дроссель 20, ограничивающий расход рабочей жидкости, поступающей в рабочую полость регулятора 12 мощности. К напорной гидролинии управляющего насоса 17 подключена полость 21 управления электрогидравлического усилителя 22, а полость 23 питания электрогидравлйческого усилителя 22 подключена гидролинией к рабочей полости регулятора 12 мощности. Три другие полости электрогидравлического усилителя 22 со сливом. Полости 24-26 электрогидравлического усилителя 9 объединены и соединены гидролинией с порщне- вой полостью 27 гидроподъемника 1 (2), которая посредством гидролинии 28 соеди- иена со сливом. Электромеханический преобразователь 29 электрогидравлического усилителя 9 электрически подключен к выходу электронного усилителя 30, а электромеханический преобразователь 31 электрогидравлического усилителя 22 подключен к выходу электронного усилителя 32. Входы электронных усилителей 30 и 32 подключены к выходам преобразователей 33 и 34 щиротно- импульсных сигналов в непрерывные. Входы преобразователей 33 и 34 подключены к вы- ходу щиротно-импульсного модулятора 35, вход которого подключен к микропроцессорному контролеру 36. Датчик пути состоит
5 Q 5 0 5 j
5
0
из двух бесконтактных сельсинов 37 и 38, валы которых механически соединены с валами цилиндрического редуктора 39, который посредством троссовой передачи 40 связан со штоком 41 гидроподъемника 1 и 2.
Трехфазные выходные обмотки сельсинов 37 и 38 подключены к промышленной сети через понижающий трансформатор. Однофазная входная обмотка каждого сельсина 37 и 38 подключена к входу измерительного узла 42, выход которого подключен к входу микропроцессорного контролера 36, выход которого также подключен к входу узла 43 согласования. Выход узла 43 согласования подключен к электромагниту распределителя 16 и пускателю электродвигателя регулируемого насоса 11 гидроподъемни- кка 1 (2). Вход микропроцессорного контролера 36 подключен к пульту 44 управления.
Два щиротно-импульсных модулятора 35, микропроцессорный контролер 36, измерительный узел 42, узел 43 согласования и пульт 44 управления объединены в общий узел - программатор 45. Штоки 41 гидроподъемников 1 и 2 шарнирно соединены с затвором 46.
Устройство управления гидроприводом затвора щлюза работает следующим образом. При шлюзовании судов привод выполняет три технологические операции: подъем затвора в положение «Закрыть, подъем затвора в положение «Наполнение и опускание затвора в положение «Открыть.
Подъем затвора в положение «Закрыть. Эта операция осуществляется по скоростному графику-программе. На пульте 44 управления включается ключ операции «Закрыть, в результате чего подается сигнал на микропроцессорный контролер 36, в котором записана программа этой технологической операции. Затем включается ключ «Запуск контролера 36. В контролере 36 формируются цифровые сигналы в соответствии с включенной программой, которые с выхода контролера поступают на входы широт- но-импульсных модуляторов 35 обоих гидроподъемников 1 и 2, где преобразовываются в широтно-импульсные сигналы и через электронные ключи, установленные в широт- но-импульсных модуляторах 35, поступают на электронные усилители 32 через преобразователь 34. С выхода электронных усилителей 32 непрерывные сигналы управления поступают на электромеханические преобразователи 31 электрогидравлических усилителей 22. Одновременно, с выхода контрю- лера 36 сигнал поступает на узел 43 согласования, включающий тиристорные пускатели электродвигателей регулируемых насосов 11, которые начинают разворачиваться при нулевой подаче, так как в рабочих полостях регуляторов 12 мощности давление управления равно нулю за счет того, что как только встроенные насосы 17 управления подают рабочую жидкость в полости 21 управления электрогидравлических усилителей 22, поток рабочей жидкости от управляющих насосов 17, проходя через дроссели 20 в регуляторы 12 мощности, сливаются в баки 18 через полости 23 питания усилителей 22.
Сигнал управления, выдаваемый микропроцессорным контролером 36, непрерывно изменяется в функции времени, пропорционально запрограммированному закону перебираются исходя из конкретных условий. Затем включается ключ «Запуск контролера 36. В остальном принципе работы системы управления такой же как и при технологической операции «Закрыть, за тем исключением, что реализуются другие законы перемещения затвора 46, обеспечивающие максимальную допустимую скорость затвора в данной технологической операции.
Опускание затвора в положение «0тмещения затвора 46. Соответственно изме- ю крыть. Эта операция осуществляется по
оптимальному скоростному графику-программе. На пульте 44 управления включается ключ операции «Открыть, в результате чего подается сигнал на микропроцессорный контролер 36, в котором записана програмнятся и положение золотников в электрогидравлических усилителях 22; золотники начинают прикрывать полости 23 питания, давление рабочей жидкости в регуляторах 12 мощности начинает повыщаться, расход
в регулируемых насосах 11 начинает уве- )5 ма этой технологической операции. Затем личиваться пропорционально повышению дав- включается ключ запуска контролера 36. ления жидкости в рабочих полостях регу- В контролере 36 формируются цифровые ляторов 12 мощности. Рабочая жидкость из сигналы в соответствии с включенной прог- напорных гидролиний регулируемых насо- раммой, которые с выхода контролера 36 сов 11 начинает поступать через обратные „ поступают на входы широтно-импульсных
клапаны 13 и фильтры 14 в напорную -
гидролинию системы. Полости 7 питания электрогидравлических усилителей закрыты, так как их электромеханические преобразователи 29 обесточены. Предохранительные
модуляторов 35 обоих гидроподъемников 1 и 2, где преобразовываются в щиротно- импульсные сигналы и через электронные ключи, установленные в щиротно-импуль- сных модуляторах, поступают на электронклапаны 10 закрыты. Рабочая жидкость от 25 ные усилители 30 через преобразователь 33.
регулируемых насосов 11 проходит через автоматически открывающиеся обратные управляемые клапаны 3 и поступает в щтоко- вые полости 5 гидролодъемников 1 и 2, приводя в движение затвор 46. По мере
С выхода электронных усилителей 30 непрерывные сигналы управления поступают на электромеханические преобразователи 29 электрогидравлических усилителей 9. Одновременно с выхода контролера 36 сигнал
движения затвора 46 микропроцессорный 30 поступает на узел 43 согласования, который контролер 36, получая информацию от сель- включает электромагниты распределителей синов 37 и 38, механически связанных со16, при этом рабочая жидкость из штокощтоками гидроподъемников, сравнивает ее с вых полостей гидроподъемников 1 и 2 по- заданной программой в функции времени и ступает в полости 15 управления обрат- корректирует выходной сигнал управления. ных управляемых клапанов 3, которые прину- В результате электродгидравлические уси- дительно открываются и жидкость, вытесня- лители 22 регулируют расходы насосов 11емая под действием веса затвора 46 из
для обеспечения заданного графика движе- щтоковых полостей 5 гидроподъемников, по- ния затвора 46. ступает в напорные гидролинии системы и
При достижении затвора конечного поло-полости 8 управления электрогидравличесжения «Закрыть микропроцесорный контро- о усилителей 9, золотники которых откры- лер 36 прекращает выдавать выходные сигналы на широтно-импульсные модуляторы 35 и узел 43 согласования. Электродвигатели регулируемых насосов 11 отключаются, насосы останавливаются, золотники электрогидравлических усилителей 22 устанавливаются 45 поршневые полости 27, проходя через об- в среднее положение. Обратные управля- ратные управляемые клапаны 3 и полости 7 емые клапаны 3 под действием пружин и питания электрогидравлических усилителей 9. давления рабочей жидкости в штоковых по- Затвор 46 под действием собственного веса лостях гидроподъемников 1 и 2 закрываются начинает опускаться. Так как при опуска- и устройство управления гидроприводом зат- нии затвора увеличивающийся объем поршне- вора щлюза приходит в исходное положе- вых полостей 27 гидроподъемников 1 и 2
больще, чем объем жидкости, вытесняемый из штоковых полостей 5. Для полного заполнения поршневых полостей к ним подключены вторые гидролинии 28, по которым производится подсос рабочей жидкости из баков 18. По мере опускания затвора 46 микропроцессорный контролер 36, получая информацию от сельсинов 37 и 38, сравниваются на величину, пропорциональную сиг- нналам, поступившим от электронных усилителей 30.
Рабочая жидкость из щтоковых полостей 5 гидроподъемников 1 и 2 перетекает в
ние.
Подъем затвора в положение «Наполнение. На пульте 44 включается один из ключей «Наполнение в зависимости от выбранного графика движения затвора, оптимального для данного судна или группы судов. Количество графиков и законы перемещения затвора для разных шлюзов вы55
бираются исходя из конкретных условий. Затем включается ключ «Запуск контролера 36. В остальном принципе работы системы управления такой же как и при технологической операции «Закрыть, за тем исключением, что реализуются другие законы перемещения затвора 46, обеспечивающие максимальную допустимую скорость затвора в данной технологической операции.
Опускание затвора в положение «0т крыть. Эта операция осуществляется по
оптимальному скоростному графику-программе. На пульте 44 управления включается ключ операции «Открыть, в результате чего подается сигнал на микропроцессорный контролер 36, в котором записана программа этой технологической операции. Затем включается ключ запуска контролера 36. В контролере 36 формируются цифровые сигналы в соответствии с включенной прог- раммой, которые с выхода контролера 36 поступают на входы широтно-импульсных
ма этой технологической операции. Затем включается ключ запуска контролера 36. В контролере 36 формируются цифровые сигналы в соответствии с включенной прог- раммой, которые с выхода контролера 36 поступают на входы широтно-импульсных
-
модуляторов 35 обоих гидроподъемников 1 и 2, где преобразовываются в щиротно- импульсные сигналы и через электронные ключи, установленные в щиротно-импуль- сных модуляторах, поступают на электронные усилители 30 через преобразователь 33.
С выхода электронных усилителей 30 непрерывные сигналы управления поступают на электромеханические преобразователи 29 электрогидравлических усилителей 9. Одновременно с выхода контролера 36 сигнал
поступает на узел 43 согласования, который включает электромагниты распределителей 16, при этом рабочая жидкость из штоко усилителей 9, золотники которых откры- поршневые полости 27, проходя через об- ратные управляемые клапаны 3 и полости 7 питания электрогидравлических усилителей 9. Затвор 46 под действием собственного веса начинает опускаться. Так как при опуска- нии затвора увеличивающийся объем поршне- вых полостей 27 гидроподъемников 1 и 2
ваются на величину, пропорциональную сиг- нналам, поступившим от электронных усилителей 30.
Рабочая жидкость из щтоковых полостей 5 гидроподъемников 1 и 2 перетекает в
вает ее с заданной программой в функции времени и корректирует выходной сигнал управления. В результате электрогидравлические усилители 9 регулируют расходы жидкости, перетекающей из штоковых полостей 5 гидроподъемников 1 и 2 в поршневые полости 27 через полости 7 питания.
При достижении затвором конечного положения «Открыть контролер 36 прекращает выдавать выходные сигналы на широт- но-импульсные модуляторы 35 и узел 43 согласования. Золотники электрогидравличес- ких усилителей 9 под действием давления рабочей жидкости в полостях 8 управления устанавливаются в среднее положение, перекрывая полости 7 питания от напорных гидролиний гидроподъемников 1 и 2. При снятии питания с электромагнитов распределителей 16 они сообщают полости 15 обратных управляемых клапанов 3 со сливом.
электрогидроусилителя и подклаланнои полостью обратного управляемого клапана,над клапанная полость которого соединена со штоковой полостью гидроподъемника и через распределитель - с управляющей полостью
5 обратного управляемого клапана, причем вход электрогидроусилителя соединен с выходом первого электронного усилителя, отличающееся тем, что, с целью повышения надежности в работе и снижения потребля10 емой мощности, программатор содержит два широтно-импульсных модулятора и измерительный узел, соединенные, первые - своими входами, а последний - своим выходом с контролером, каждый блок управления содержит второй электронный усилитель и два
15 преобразователя широтно-импульсного сигнала в аналоговый сигнал, каждый широт- но-импульсный модулятор программатора через преобразователи широтно-импульсного сигнала в аналоговый сигнал соединены с
При этом обратные управляемые клапаны 3 .. входами электронных усилителей своего блопод действием пружин и давления рабочей жидкости в штоковых полостях 5 гидроподъемников 1 и 2 закрываются.
ка управления гидроподъемником, насосная станция каждого из которых содержит регулируемый и управляемый насосы и второй электрогидравлический усилитель, вход которого соединен с выходом второго элект- 25 ронного усилителя, полость управления - на порной гидролинией управляющего насоса, а полость питания - с рабочей полостью регулятора мощности регулируемого насоса, вход регулятора мощности регулируемого насоса соединен с выходом узла соглаФормула изобретения
Устройство управления гидроприводом затвора шлюза, содержащее программатор с контролером, соединенным с пультом управления и узлом согласования, два однока управления гидроподъемником, насосная станция каждого из которых содержит регулируемый и управляемый насосы и второй электрогидравлический усилитель, вход которого соединен с выходом второго элект- 25 ронного усилителя, полость управления - на порной гидролинией управляющего насоса, а полость питания - с рабочей полостью регулятора мощности регулируемого насоса, вход регулятора мощности регулируемого насоса соединен с выходом узла соглатипных узла обратной связи и два однотип- 30 сования программатора, каждый узел обратных блока управления первым и вторым гидроподъемниками, каждый из которых состоит из насосной станции, напорная линия которой через обратный клапан и фильтр соединена с предохранительным клапаном, полостями питания и управления первого
ной связи содержит два бесконтактных сельсина, валы которых соединены посредством механических передач со штоком своего гидроподъемника, а выходы всех сельсинов соединены с входами измерительного узла программатора.
электрогидроусилителя и подклаланнои полостью обратного управляемого клапана,над- клапанная полость которого соединена со штоковой полостью гидроподъемника и через распределитель - с управляющей полостью
обратного управляемого клапана, причем вход электрогидроусилителя соединен с выходом первого электронного усилителя, отличающееся тем, что, с целью повышения надежности в работе и снижения потребляемой мощности, программатор содержит два широтно-импульсных модулятора и измерительный узел, соединенные, первые - своими входами, а последний - своим выходом с контролером, каждый блок управления содержит второй электронный усилитель и два
преобразователя широтно-импульсного сигнала в аналоговый сигнал, каждый широт- но-импульсный модулятор программатора через преобразователи широтно-импульсного сигнала в аналоговый сигнал соединены с
входами электронных усилителей своего блока управления гидроподъемником, насосная станция каждого из которых содержит регулируемый и управляемый насосы и второй электрогидравлический усилитель, вход которого соединен с выходом второго элект- ронного усилителя, полость управления - на порной гидролинией управляющего насоса, а полость питания - с рабочей полостью регулятора мощности регулируемого насоса, вход регулятора мощности регулируемого насоса соединен с выходом узла согла сования программатора, каждый узел обратной связи содержит два бесконтактных сельсина, валы которых соединены посредством механических передач со штоком своего гидроподъемника, а выходы всех сельсинов соединены с входами измерительного узла программатора.
ь,
L.
гШ,
I
гШ,
.ШШг
Т
I
5N
4N
Л W -
rJ.
гШ,
ШШ
-ЛГ
5N
4
U
Редактор И.Дербак Заказ 7178/45
Составитель Б. Шевченко Техред И. ВересКорректор В. Бутяга
Тираж 862Подписное
ВНИИПИ Государственного комитета СССР гю делам изобретений и открытий
13035, Москва, Ж-35, Раупюк;: паб., д. 4/5 Производственно-полиграфическое нредприят;-л . г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Сегментный затвор с системой гидроприводов | 2023 |
|
RU2830615C2 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
Изобретение может быть использовано в гидравлических подъемных механизмах судоходных шлюзов. Устройство содержит программатор, управляющий перемещением двух гидроподъемников с помощью двух насосных станций управляемой производительности через систему электронных и электрогидравлических элементов по временным программам. Информация о перемещении щтоков гидроподъемников поступает через сельсинные датчики. Использование щиротно-импульсной модуляции сигналов управления повыщает надежность устройства в работе. Выбор типа насосных станций уменьшает потребляемую мощность. 1 ил ю 00 1с
| Гидропривод затвора шлюза | 1984 |
|
SU1208130A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
