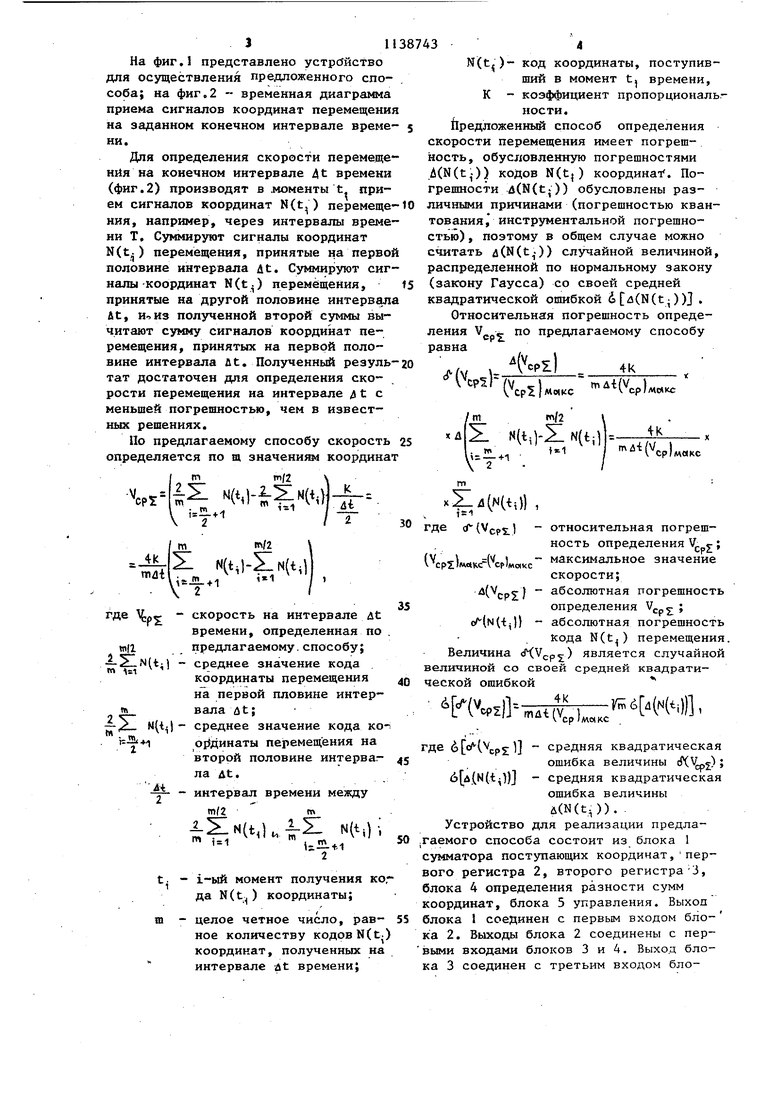
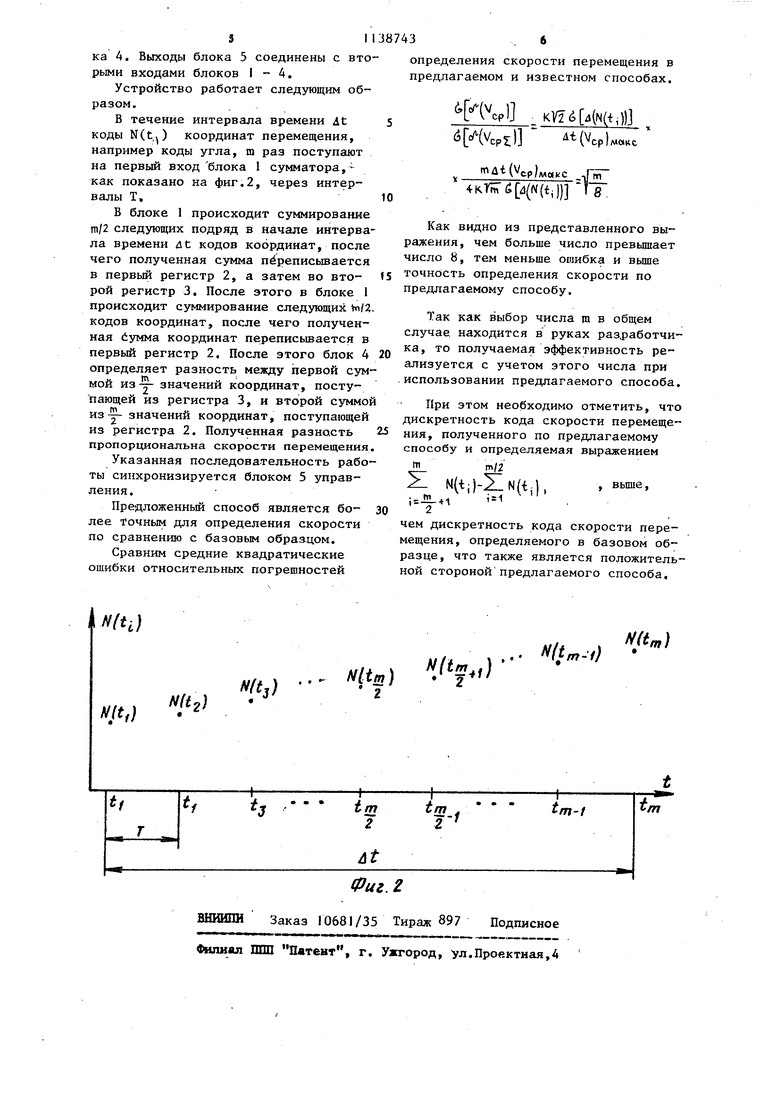
аг./ Изобретение относится к вычислительной технике и автоматике и может найти применение при определении ско ростей углового или линейного переме щения . Известен способ определения скорости перемещения на конечном интервале времени перемещения, при котором производят подсчет числа импульсов, полученных на этом интервале С ij Однако при реализации способа на результат влияют погрешности первого и последнего импульсов этого интервала из числа пересчитанных на конечном интервале времени перемещения, что приводит к ошибке определения скорости перемещения. Наиболее близким к предлагаемому, является способ C2J определения скорости перемещения на конечном интервале времени путем нахождения разности координат, относящихся к .концу и началу интервала времени. дх )) V - средняя скорость н интервале} ДЪ - интервал времени; x(tp) - координата положени в начале интервала x(t.+ut) - координата положен в конце интервала. При реализации способа величина A может быть задана практически сколь угодно точно, что может быть обеспечено использованием стабильной (квар цованной) частоты. Поэтому погрешнос определения зависит от погрешности величин x(t. + ut) и x(tp. При представлении координат положения ци ровым кодом величина будет определяться как V -K.fe li:: iiiiL V,p-K , где N(t.) - цифровой код координа ты x(t- +ut); N(t) - цифровой код координа ты x(t,); К - коэффициент пропород ональности. Относительная погрешности величины V XN(t..4t)) f (ср1м«кс tiV,pU,,L ((t,) где (f(V rp) относительная погрешность величины V a(VL ) - абсолютная ошибка величины Vj.p ; (Kc максимальное значение величины VCP ; d(Ntj-fdt);. 4(N(t.)) - погрешности цифровых кодов координат положения, в конце и начале интервала ut, Имея в виду, что в общем случае погрешности ji(N(t|)) являются случайной величиной, распределенной по нормальному закону, со своей средней квадратической ошибкой (N(t-))J , то получаем, что относительная погрешность tKVcp) определения величины VCP рассматриваемым способом имеет среднюю квадратическую ошибку, равную )-1то4;:г чч(.ш, где э((Уср) средняя квадратическая ошибка вели чины ((Vc.p); (N(t-))j - средняя квадратическая ошибка погрешности 4(N(t|)). Указанная ошибка приводит к снижению точности определения скорости перемещения. Целью изобретения является повышение точности определения скорости перемещения . Поставленная цель достигается тем, что согласно способу определения скорости перемещения на конечно интервале времени перемещения, заключающемуся в измерении координат перемещения на заданном интервале времени и последующем вычислении скорости перемещения по отношению пути и времени, координаты перемещения измеряют через дискретные равные промежутки времени перемещения, суммируют их, после чего дополнительно измеряют координаты перемещения через дискретные равные первым промежутки времени на последующей половине заданного конечного интервала времени, суммируют их, из полученной суммы этих координат вычитают предьщушую сумму сигналов координат перемещения, после чего вычисляют скорость перемещения на заданном интервале перемещения. 311 На фиг.1 представлено устройство для осуществления предложенного способа; на фиг.2 - временная диаграмма приема сигналов координат перемещения на заданном конечном интервале времени. Для определения скорости перемещения на конечном интервале 4t времени (фиг.2) производят в моменты t прием сигналов координат N(t. ) перемещения, например, через интервалы времени Т. Суммируют сигналы координат N(t) перемещения, принятые на первой половине интервала At. Суммируют сигналы -координат N(t.) перемещения, принятые на другой половине интервеша At, ИоИз полученной второй суммы вычитают сумму сигналов координат перемещения, принятых на первой половине интервала ut. Полученный результат достаточен для определения скорости перемещения на интервале д t с меньшей погрешностью, чем в известных решениях. По предлагаемому способу скорость определяется по щ значениш4 координат w- l-w-i: N(t,i-5lN(ta - скорость на интервале &t времени, определенная по предлагаемому.способу; .(t) - среднее значение кода координаты перемещения на первой пловине интер«1 вала dt; - ,2 N(t) - среднее значение кода ко 01 динаты перемещения на второй половине интерваг ла At. - - интервал времени между т/2 рп 25Г../. A.Z N(tO-i . i-ый момент получения ко да N(t. ) координаты; целое четное число, равное количеству кодов N(tj координат, полученных на интервале ut времени; 3 N(t,)- код координаты, поступивший в момент t, - времени, К - коэффициент пропорциональности. Предложенный способ определения скорости перемещения имеет погрешность, обусловленную погрешностями i(N()) кодов N(tj ) координат . Погрешности u(N(t;)) обусловлены различными причинами (погрешностью квантования, инструментальной погрешностью) , поэтому в общем случае можно считать A(N()) случайной величиной, распределенной по нормальному закону (закону Гаусса) со своей средней квадратической ошибкой (N(t))j . Относительная погрешность определения V по предлагаемому способу равна (Ve.l.miilV Jcp//4c Kc / mm/2 :ДР N(i,)-ZN{ti cpfMoiKC fe44)) (Vcpil относительная погрешность определения V. ; )(MiKcKV( максимальное значение CpSl( CplmolKC скорости; 4(Vj. 2 J - абсолютная погрешность определения V ; o(N(ij)) - абсолютная погрешность Кода N(t) перемещения. Величина ) является случайной величиной со своей средней квадратической ошибкой HV| - M ;i:;r t(« где (р5-1 - средняя квадратическая ошибка величины (KVq,) ; (N(t))j - средняя квадратическая ошибка величины u(N(t. )).. Устройство для реализации предлагаемого способа состоит из блока 1 сумматора поступающих координат,первого регистра 2, второго регистра3, блока 4 определения разности сумм координат, блока 5 управления. Выход блока 1 соединен с первым входом блока 2. Выходы блока 2 соединены с первыми входами блоков 3 и 4. Выход блока 3 соединен с третьим входом блоS11ка 4. Выходы блока 5 соединены с вторыми входами блоков 1-4. Устройство работает следующим образом. В течение интервала времени At коды N(t,) координат перемещения, например коды угла, m раз поступают на первый вход блока 1 сумматора, как показано на фиг,2, через интервалы Т. В блоке 1 происходит суммирование т/2 следующих подряд в начале интервала времени ut кодов координат, после чего полученная сумма пё реписьшается в первый регистр 2, а затем во второй регистр 3, После этого в блоке 1 происходит суммирование следующих 12 кодов координат, после чего полученная йумма координат переписьшается в первый регистр 2, После этого блок 4 определяет разность между первой суммой из-у значений координат, поступающей из регистра 3, и второй суммой из-J- значений координат, поступающей из регистра 2. Полученная разность пропорциональна скорости перемещения. Указанная последовательность работы синхронизируется блоком 5 управления. Предложенный способ является более Точным для определения скорости по сравнению с базовым образцом. Сравним средние квадратические ошибки относительных погрешностей 3 определения скорости перемещения в предлагаемом и известном способах. ,KV2(4(N(,)) HVcps) М U C cplMoikC 4КТ;ГЙ 4(1Ч(.)) Гв Как видно из представленного выражения, чем больше число превышает число 8, тем меньше ошибка и вьше точность определения скорости по предлагаемому способу. Так как выбор числа m в общем случае находится в руках разработчика, то получаемая эффективность реализуется с учетом этого числа при использовании предлагаемого способа. При этом необходимо отметить, что дискретность кода скорости перемещения, полученного по предлагаемому способу и определяемая выражением m m/2 N(tj)-2lN(ij), , выше. чем дискретность кода скорости перемещения, определяемого в базовом образце, что также является положительной стороной предлагаемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕГО КВАДРАТИЧЕСКОГО ОТКЛОНЕНИЯ | 1972 |
|
SU419899A1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| Способ измерения амплитудного значения электрического сигнала | 1986 |
|
SU1441321A1 |
| Способ измерения частоты | 1987 |
|
SU1613968A1 |
| Устройство для прогнозирования постепенных отказов | 1978 |
|
SU767709A1 |
| Способ управления пьезодвигателем | 1986 |
|
SU1397872A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТАКТОВОГО ИНТЕРВАЛА СЛУЧАЙНОГО ПОТОКА ИМПУЛЬСОВ С ДИСКРЕТНЫМ ВРЕМЕНЕМ | 2002 |
|
RU2230331C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ АППРОКСИМАЦИИ ПРИ ВЫДЕЛЕНИИ ПОЛЕЗНОГО СИГНАЛА В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2013 |
|
RU2541919C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ | 2005 |
|
RU2301445C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ТРЕНДА МЕТОДОМ СКОЛЬЗЯЩЕГО РАЗМНОЖЕНИЯ ОЦЕНОК ТРЕНДА ЕГО ЕДИНСТВЕННОЙ ИСХОДНОЙ РЕАЛИЗАЦИИ ("КРОТ") И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2257610C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПЕРЕМЕЩЕНИЯ на конечном интервале . времени перемещения, заключающийся в измерении координат перемещения на заданном интервале времени и последующем вычислении скорости перемещения по отношению пути и времени. отличающийся тем, что, с целью повьшения его точности, координаты перемещения измеряют через дискретные равные промежутки времени на одной половине заданного интервала времени перемещения, суммируют их, после чего дополнительно измеряют координаты перемещения через дискретные равные первым промежутки времени на второй половине.заданного конечного интервала времени, суммируют их, из полученной суммы этих координат вычитают предыдущую сумму сигналов координат перемещения, после чего вычисляют скорость перемещения на заданном интервале перемещения.
WJ Nft,) - Jt.) ff(tm) ... ff/fm-f} //Гы,,) -
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИБОР ДЛЯ РАЗЛИВА В БУТЫЛКИ | 1926 |
|
SU9301A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сивухин Д | |||
| В | |||
| Общий курс физи.ки | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
