(21)4088644/24-24
(22)11.07.86
(46) 23.05.88. Бюл. № 19
(71)Московский энергетический институт
(72)А.А.Никольский, Н.А.Краев и Е.Я.Лопатин
(53)62-50(088.8)
(56)Бутковский А.Г., Фельдбаум А.А. Методы теории автоматического управления. - М.: Наука, 197Г, с. 676-684.
Устройства и элементы систем автоматического регулирования. Кн.-1: Измерительные устройства, преобразующие элементы и устройства./Г1од ред. В.В.Солодовникова. - М.: Машиностроение, 1973, с. 410-413, рис. XI-20.
(54)СПОСОБ УПРАВЛЕНИЯ ПЬЕЗОДВИГА- ТЕЛЕМ
(57)Изобретение относится к электротехнике и автоматике и может быть использовано при создании систем управления пьезоэлектрическими исполнительными элементами для прецизионных перемещений. Целыр изобретения является повышение динамической точности позиционирования. Высокая динамическая точность позиционирований с учетом распределенности параметров пьезодвигателя достигается за счет формирования управляющего воздействия на пьезодвигатель в дискретные моменты времени с интервалом, равным половине периода собственных колебаний пьезодвигателя, путем суммирования управляющего воздействия и величины рассогласования пьезопривода, соответствующих предыдущему моменту времени, и величины рассогласования, соответствующей текущему моменту времени. 2 ил.
с «5
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1989 |
|
RU2012031C1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Двухканальный электропривод | 1987 |
|
SU1473060A1 |
| Система регулирования горения топлива в проходной нагревательной печи | 1983 |
|
SU1149107A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| УСТРОЙСТВО ДЛЯ ТОКАРНОЙ ОБРАБОТКИ НЕКРУГЛЫХ ДЕТАЛЕЙ | 2011 |
|
RU2457075C1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2002 |
|
RU2218629C2 |
оо со |
00
to
Изобретение относится к электротехнике и автоматике и может быть использовано при создании систем управления пьезоэлектрическими исполнительными элементами для прецизионных перемещений в оптико-механических приборах, в технологическом оборудовании для производства электронных
приборов и в механических сканирующихю ответствующего д, однако фаза послед
устройствах.
Целью изобретения является повышение динамической точности позиционирования .
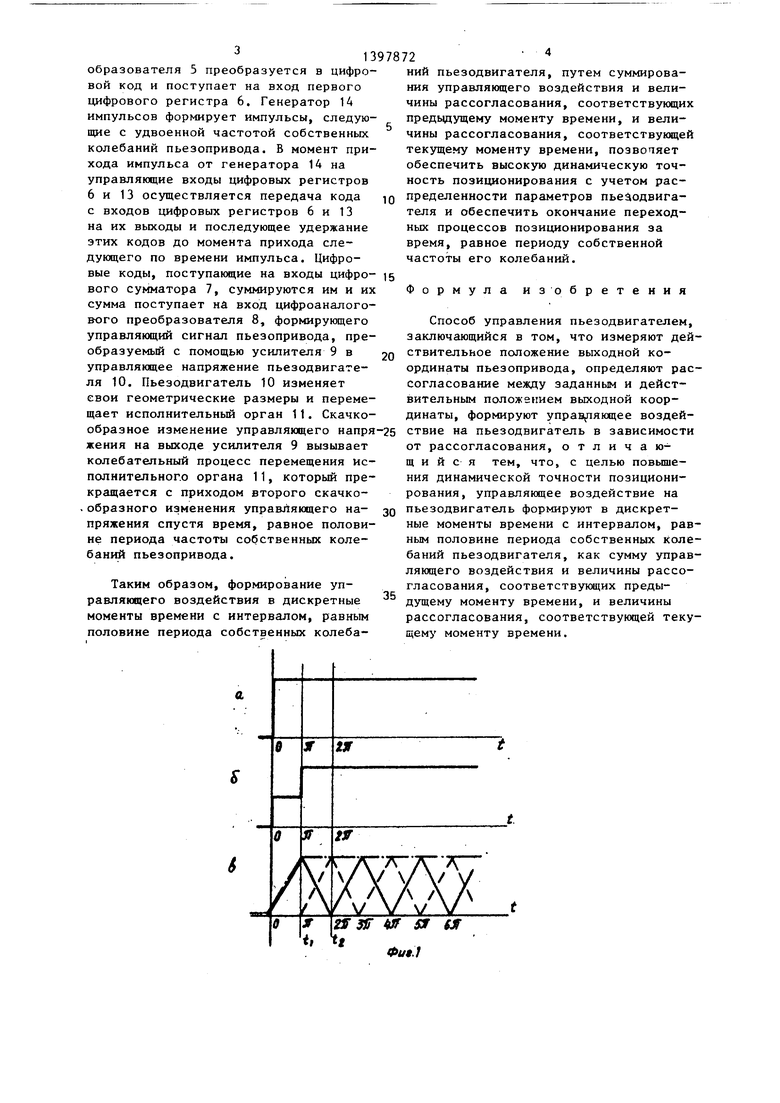
На фиг. 1 представлены временные диаграммы, поясняющие действие способа: о- временная диаграмма задающего сигнала; 6 - временная диаграмма изменения управляющего воздействия, (Поступающего на пьезодвигатель; В - временная диаграмма изменения выходной координаты пьезопривода; на фиг. 2 - устройство, реализующее предлагаемый способ.
При изменении задающего воздействия изменяется величина рассогласования пьезопривода. определяемая как разность сигналов задания по положению и действительного положения, опр€щеляемого датчиком положения. Пусть коэффициент усиления системы управления выбран таким образом, что управляющее воздействие, подаваемое в соответствующий определенной ошибке л дискретный момент времени, соответствовало бы в установившемся режиме относительному удлинению пьезо- двигателя, равному /3/2 (фиг. 1).
Так как пьезодвигатель представляет собой колебательньш объект регулирования с распределенными параметрами и незначительным внутренним демпфированием, то скачок управляющего воздействия, приложенный в момент времени , соответствующий ошибке и , возбудит в нем колебания с собственной частотой, зависящей от параметров пьезопривода, и двойной амплитудой, равной л, относительно нового установившегося положения.
15
20
25
30
35
40
45
них колебаний отстает от фазы коле- , возбужденных предьщущим изме нением управляющего сигнала на н, т.е. противоположна.
Согласно принципу суперпозиции колебаний с противоположной фазой пьезопривод после момента времени t будет находиться в новом установившемся пoлoжeнииj соответствующем изг менению его длины на величину 4.
Изменяя коэффициент усиления системы управления, можно обеспечить другие настройки системы и получать переходные процессы позиционирования от апериодических до колебательных, причем в последнем случае частота колебаний в переходных процессах при управлении согласно предлагаемом способу равна собственной частоте ко лебаний пьезопривода.
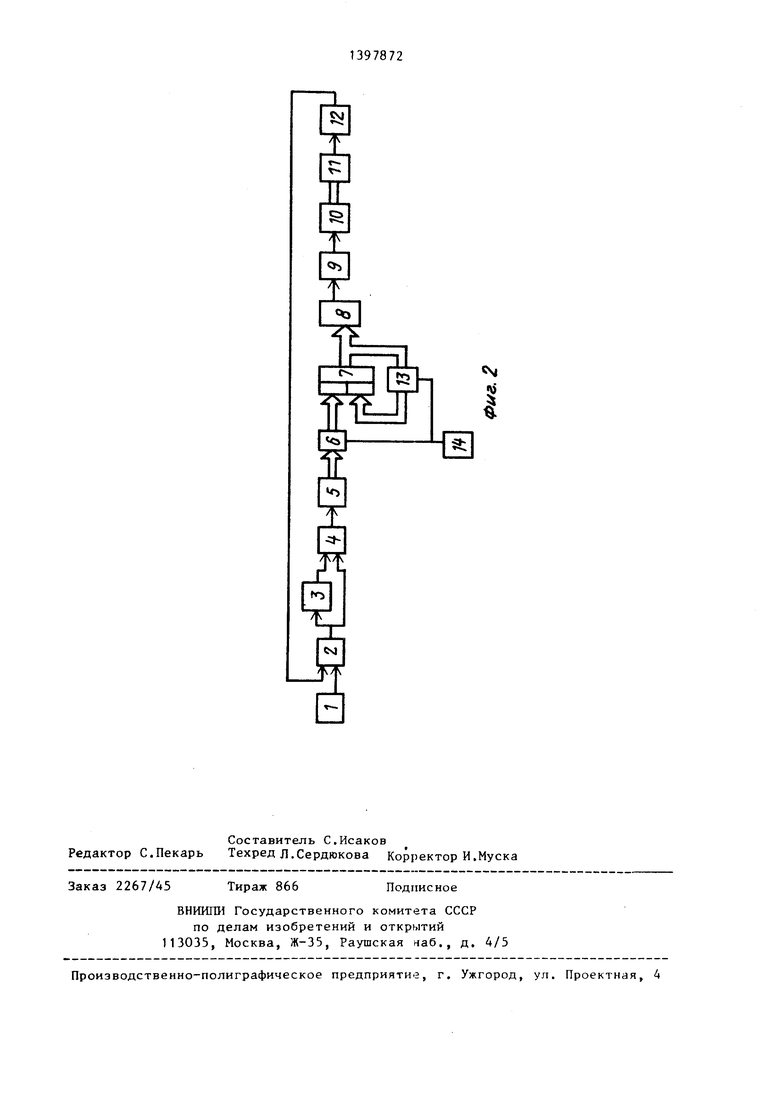
Устройство (фиг. 2) для управлени пьезодвигателем содержит блок 1 задания, первый сумматор 2, блок 3 задержки, второй сумматор 4, аналого- цифровой преобразователь 5, первый регистр 6, третий сумматор 7, цифро- амалоговый преобразователь 8, усилитель 9, пьезодвигатель 10, исполнительный орган 11, датчик 12 положения, второй регистр 13, генератор 14 импульсов.
Устройство работает следующим образом.
На вход устройства поступает скач кообразный задающий сигнал. Сигнал задания с блока 1 задания алгебраически суммируется первым аналоговым сумматором 2 с сигналом датчика 12 положения исполнительного органа 11. ошибки системы с выхода персоответствующего Л/2. Через время t,50 всго аналогового сумматора задержит.е. равное половине периода собственной частоты пьезодвигателя, изменение размеров пьезодвигателя достигнет Л. В этот момент величина рассогласования пьезопривода равна нулю, и управляющее воздействие на пьезодвигатель изменяется на величину, соответствующую ошибке л, олределенной в предыдущий дискретный мс мент времени, т.е. на ту же величину, что и в предыдущий момент времени. Это ступенчатое изменение управляющего сигнала также возбуждает в пьезоприводе колебания на собственной частоте с амплитудой л/2 около нс вого установившегося положения со5
0
5
0
5
0
5
них колебаний отстает от фазы коле- , возбужденных предьщущим изменением управляющего сигнала на н, т.е. противоположна.
Согласно принципу суперпозиции колебаний с противоположной фазой пьезопривод после момента времени t, будет находиться в новом установившемся пoлoжeнииj соответствующем изг менению его длины на величину 4.
Изменяя коэффициент усиления системы управления, можно обеспечить другие настройки системы и получать переходные процессы позиционирования от апериодических до колебательных, причем в последнем случае частота колебаний в переходных процессах при управлении согласно предлагаемому способу равна собственной частоте колебаний пьезопривода.
Устройство (фиг. 2) для управления пьезодвигателем содержит блок 1 задания, первый сумматор 2, блок 3 задержки, второй сумматор 4, аналого- цифровой преобразователь 5, первый регистр 6, третий сумматор 7, цифро- амалоговый преобразователь 8, усилитель 9, пьезодвигатель 10, исполнительный орган 11, датчик 12 положения, второй регистр 13, генератор 14 импульсов.
Устройство работает следующим образом.
На вход устройства поступает скачкообразный задающий сигнал. Сигнал задания с блока 1 задания алгебраически суммируется первым аналоговым сумматором 2 с сигналом датчика 12 положения исполнительного органа 11. ошибки системы с выхода первается блоком 3 задержки аналогового сигнала на время, равное половине периода частоты собственных колебаний пьезопривода, а затем суммирует- ся вторым аналоговым сумматором 4 с величиной текущего измеренного сигнала ошибки. Полученная сумма сигналов с помощью аналого-цифрового пре
образователя 5 преобразуется в цифровой код и поступает на вход первого цифрового регистра 6. Генератор 14 импульсов формирует импульсы, следующие с удвоенной частотой собственных колебаний пьезопривода. В момент прихода импульса от генератора 14 на управляющие входы цифровых регистров 6 и 13 осуществляется передача кода с входов цифровых регистров 6 и 13 на их выходы и последующее удержание этих кодов до момента прихода следующего по времени импульса. Цифровые коды, поступающие на входы цифро- вого сумматора 7, суммируются им и их сумма поступает на вход цифроаналого- вого преобразователя 8, формирующего управляющий сигнал пьезопривода, преобразуемый с помощью усилителя 9 в управляющее напряжение пьезодвигате- ля 10. Пьезодвигатель 10 изменяет евои геометрические размеры и перемещает исполнительный орган 11. Скачко
Способ управления пьезодвигателем, заключающийся в том, что измеряют действительное положение выходной координаты пьезопривода, определяют рассогласование между заданным и действительным положением выходной координаты, формируют управ аяющее воздейобразное изменение управляющего напря-25 ствие на пьезодвигатель в зависимости жения на выходе усилителя 9 вызывает колебательный процесс перемещения исполнительного органа 11, который прекращается с приходом второго скачкообразного изменения управляющего на- зо пряжения спустя время, равное половине периода частоты собственных колебаний пьезопривода.
от рассогласования, отличающийся тем, что, с целью повышения динамической точности позиционирования, управляющее воздействие на пьезодвигатель формируют в дискретные моменты времени с интервалом, равным половине периода собственных Колебаний пьезодвигателя, как сумму управляющего воздействия и величины рассогласования, соответствующих предыдущему моменту времени, и величины рассогласования, соответствующей текущему моменту времени.
Таким образом, формирование управляющего воздействия в дискретные моменты времени с интервалом, равным половине периода собственных колеба6
fjr
t
гУДГ W ff fjf
Фи91
1397872
НИИ пьезодвигателя, путем суммирования управляющего воздействия и величины рассогласования, соответствующих предыдущему моменту времени, и величины рассогласования, соответствующей текущему моменту времени, позвопяет обеспечить высокую динамическую точность позиционирования с учетом рас- пределенности параметров пье одвига- теля и обеспечить окончание переходных процессов позиционирования за время, равное периоду собственной частоты его колебаний.
Формула изобретения
Способ управления пьезодвигателем, заключающийся в том, что измеряют действительное положение выходной координаты пьезопривода, определяют рассогласование между заданным и действительным положением выходной координаты, формируют управ аяющее воздействие на пьезодвигатель в зависимости
ствие на пьезодвигатель в зависимости
от рассогласования, отличающийся тем, что, с целью повышения динамической точности позиционирования, управляющее воздействие на пьезодвигатель формируют в дискретные моменты времени с интервалом, равным половине периода собственных Колебаний пьезодвигателя, как сумму управляющего воздействия и величины рассогласования, соответствующих предыдущему моменту времени, и величины рассогласования, соответствующей текущему моменту времени.
Г7
Г тг- f у / V
А А ДА V V V V
Составитель С.Исаков Редактор С.Пекарь Техред л.Сердюкова Корректор И.Муска
Заказ 2267/45
Тираж 866
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская каб., д. 4/5
Подписное
