2.Устройство по п. Г, о т л ичающееся тем, что блок определения возмущения выполнен в виде последовательно соедш енных первого -сумматора, инерционного звена и второго сумматора, выход которого является выходом блока, а второй его вход .соединен с вторым входом первого сумматора, первый и второй входы которого являются соответственно первым и вторым входами блока,
3.Устройство по п. 1, о т л ичающее ся тем, что блок контроля изменения параметров регулятора напряжения выполнен в виде сумматора инвертирующего интегратора, двух инвертирующих сумматоров и компаратора, ко входу которого подключен выход сумматора, к первому входу которого подключен выход инвертирующего интегратора, ко второмувходу подключен выход первого инвертирующего сумматора, а третий вход соединен
с первым входом второго И 1вертиру10 щего сумматора, выход которого подключен к одному из входов инвертирующего интегратора, второй вход которого является первым входом блока, вторым входом которого является третий вход сумматора, третьим и четвертым входом является второй и первый входы первого инвертиру5ощего сумматора, соединенные соответственно с-третьим и вторым входами второго инвертирующего сумматора, а выходы компаратора и инвертирующего интегратора являются соответственно первым и вторым выходами блока.,
4.Устройство по п. 1, о т л ичающееся тем, что блок контроля изменения параметров регулятора тока выполнен в виде двух сумматоров, инвертора, интегратора, i-швертирующего сзмматора и компаратора, ко входу которого подклточен выход первого сумматора, к первому входу которого подключен выход интегратора, ко второму входу подключен выход инвертора, третий вход соединен с третьим входом второго сумматора и является вторым входом блока, второй вход второго сумматора является шестым уходом блока, первый вход второго сумматора соединен с выходом второго инвертирующего сумматора, первый и второй входы которого являются третьим и четвертым входами блока, пятым входом которого
является третий вход второго инвертирующего сумматора, соединенный с входом инвертора, выходы компаратора и интегратора являются соответственно первым и вторым выходами блока.
5.Устройство по п. 1, о т л и чающееся тем, что блок контроля изменения параметров тиристорного преобразователя выполнен в виде инвертирующего интегратора, инвертирующего сумматора, инвертора, компаратора м трех сумматоров, первый вход первого сумматора является четвертым входом блока, второй вход первого сумматора соединен с первым входом инвертирующего интегратора и является третьим входом блока, второй вход инвертирующего интегратора соединен с входом инвертора и является пятым входом блока, выходы первого сумматора и инвертирующего интегратора подключены соответственно к первому и второму входам инвертирующего сумматора, выход которого подключен ковторому входу второго сумматора, первьй вход которого является первым входом блока, а выход соединен с первым входом третьего сумматора и является вторым выходом блока, ко второму входу третьего сумматора подключен выход инвертора, третий и четвартый входы являются соответственно вторым и шестым входами блока, вькод третьего сумматора подключен ко входу компаратора, выход которого явля.ется первым выходом блока.
6.Устройство по п. t, о т л ичающееся тем, что блок контроля изменения параметров датчика тока зыполнен в виде компаратора, двух сумматоров,инвертирующего ин- i тегратора и трех инвертирующих сумматоров, вход первого из них соединен с первыми входами инвертирующего интегратора и первого сумматора и является четвертым входом блока, второй вход первого сумматора соединен с третьим входом второго сумматора и является щестым входом блока, выход первого сумматора соединен
с вторьш входом инвертирующего интегратора, выход которого и выход первого инвертирзтощего сумматора подключены ко второму и третьему входам второго инвертирующего сумматора, первый вход которого является. , первьм входом блока, а выход соеди-.
нен с первым входом второго сумматора и является вторым выходом блока, второй ВХОД второго сумматора соединен с выходом третьего инвертирующего сумматора, первый и второй входы которого и четвертый выход второго сумматора являются соответственно третьим, пятым и вторым входами блока, первым выходом которого является выход компаратора, соединенного с вьпсодом второго сумматора.
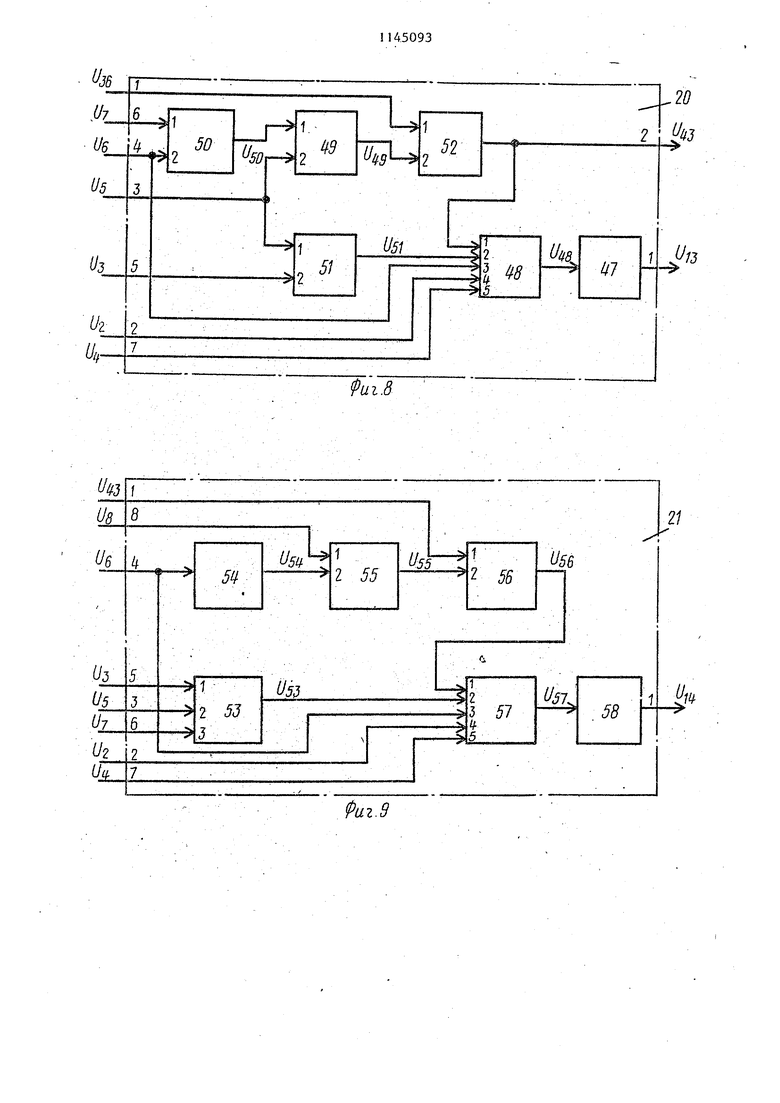
7. Устройство по п. 1, отличающееся тем, что блок контроля изменения параметров датчика напряжения выполнен в виде компаратора, сумматора, инвертируняцего интегратор - и трех инвертирующих сумматоров, первый вход первого из них является шестым входом блока, второй вход соединен с третьим входом сумматора и является четвертым входом блока, выход первого инвертирующего сумматора подключен к первому входу инвертирующего интегратора, второй вход которого соединен с первым входом второго инвертирующего сумматора и является третьим входом блока, второй вход второго инвертирующего сумматора и первый вход третьего инвертирующего сумматора являются соответственно пятым и первым входами блока, выход инвертирующего интегратора подключен ко второму входу третьего инвертирующего сумматора, выход которого подключен к первому входу сумматора и является вторым выходом блока, ко второму входу сумматора подключен вькод второго инвертирующего сумматора, ч.етвертый и пятый входы сумматора являются соответственно вторым и седьмьм входами блока, jiepBbiM выходом которого является выход компаратора, вход которого соединен с выходом сумматора
8. Устройство по п. 1, о т л ичающее ся тем, что блок конт45093
роля изменения параметров исполнительного механизма выполнен в виде первого инвертирующего сумматора и последовательно соедшгенных второго инвертирующего сумматора, инвертирующего интегратора, третьего ин- вертируюце1го сумматора, сумматора и компаратора, выход которого являет.я выходом блока, первые входы третьего инвертирующего сумматора, инвертирующего интегратора, первый, второй и третий входы первого инвертирующего сумматора и четвертый и пятый входы cyNiMaropa являются соответственно первым, восьмым, пятым, третьим, шестым, вторьм и седьмым входами блока, вход второго инвертирующего сумматора соединен с третьим входом сумматора и является четвертым входом блока, а выход первого инвертирующего сумматора соединен с вторым входом с т-матора.
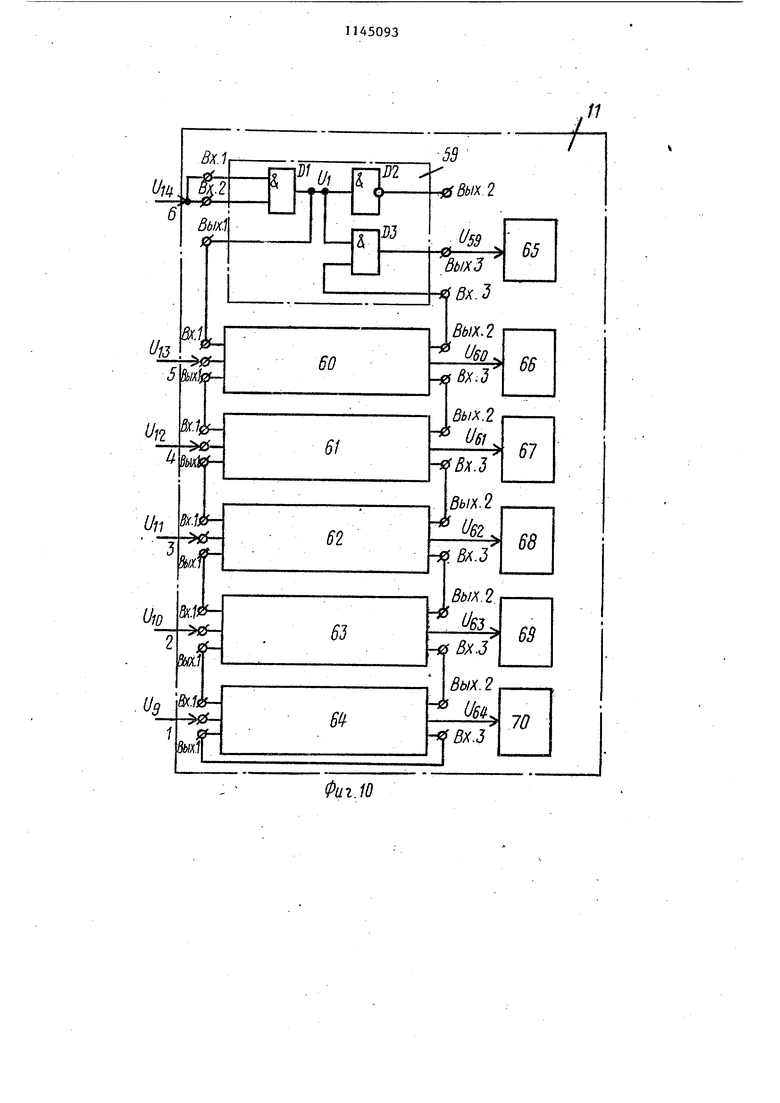
9.Устройство по п. 1, о т л ичающееся тем, что блок логики выполнен в последовательно соединенных узлов определения неисправности в исполнительном механизме, датчика тока, датчика напряжения, тиристорного преобразователя, регулятора тока и регулятора напряжения, выходы каждого из которых подключены к соответств тощим индикаторам изменения параметров, а входы являются соответственно шестым, пятым,.четвертым, третьим, вторым и первым входами блока,
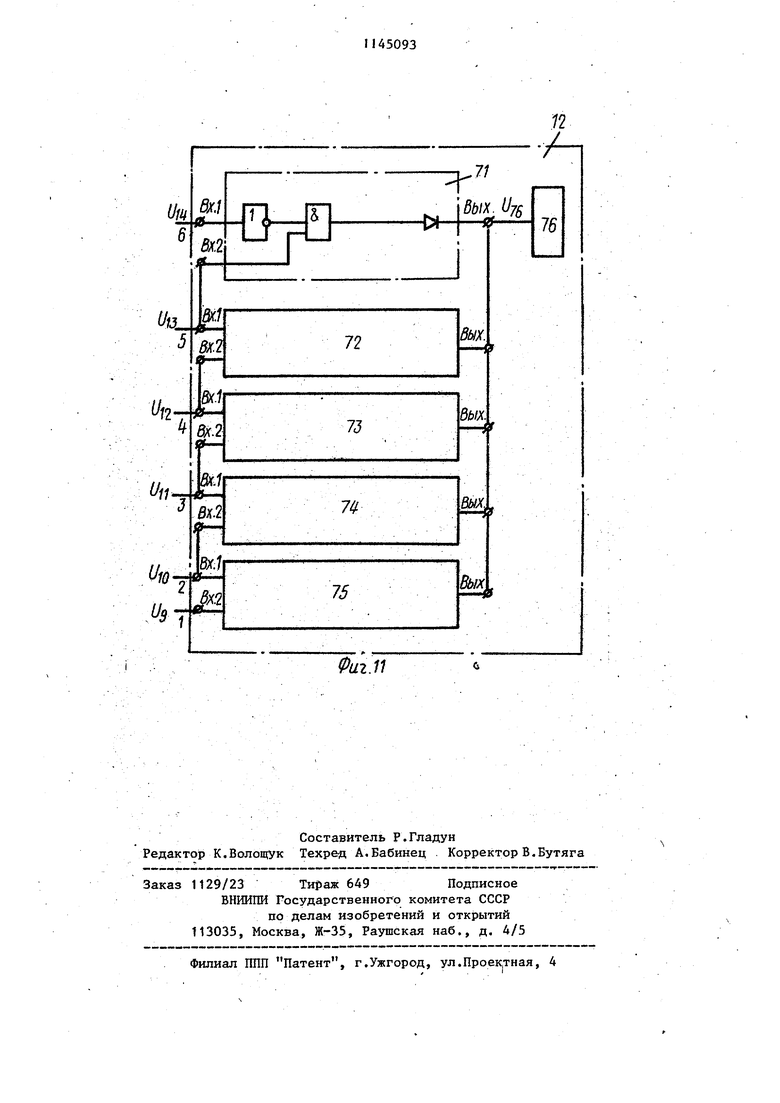
10.Устройство по п. 1, отличающееся тем, что блок достоверности контроля .выполнен в вице последовательно соединенных пяти логических узлов, первые входы которых и второй вход пятого логического узла являются соответственно шестым, пятым, четвертым, третьим, вторым и первым входами блока, а выходы всех логических узлов подключены ко входу индикатора ошибок.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации реактивной мощности | 1986 |
|
SU1347118A1 |
| Многодвигательный электропривод | 1984 |
|
SU1334349A1 |
| Устройство для регулирования напряжения тягового генератора тепловоза | 1988 |
|
SU1576371A1 |
| Регулятор мощности | 1986 |
|
SU1411109A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2012 |
|
RU2481202C1 |
| Устройство для управления преобразователем частоты | 1988 |
|
SU1629953A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2020717C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Фазовый регулятор | 1987 |
|
SU1473922A1 |

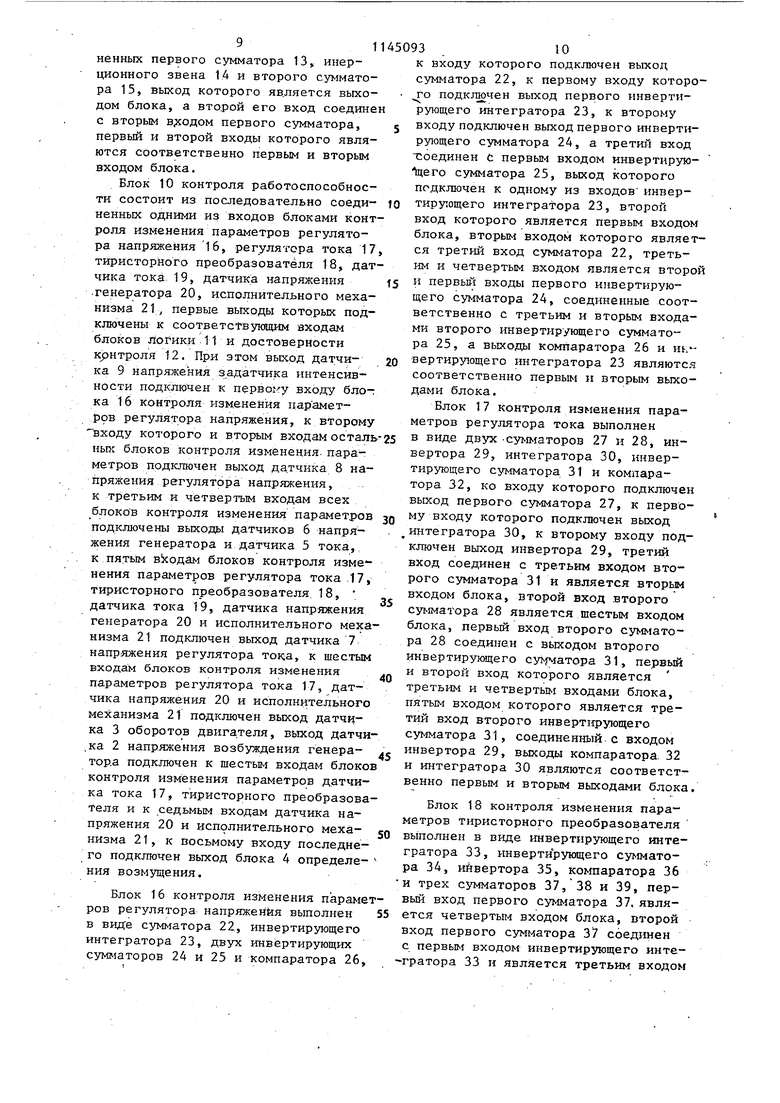
(.УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА-ДРАГЛАЙНА, содержащее блок логики, блок достоверности контроля и блок датчиков параметров, о т л ичающееся тем, что, с целью повышенйя точности управления за счет контроля вида и места дефекта в устройстве управления электроприводом в процессе функционирования, оно снабжено последовательно соединенными вторыми выходами блоками контроля изменения параметров регулятора напряжения, регулятора тока, тиристорного преобразователя, датчика тока, датчика напряжения генератора, исполнительного механизма, а блок датчиков параметров включает датчики напряжения генератора, возбуждения генератора, регулятора тока, регулятора напряжения и задатчика интенсивности, блок определения возмущения, к первому и второму - входам которого подключены соотве тственно выходы датчиков оборотов двигателя и датчика тока, первые выходы всех блоков контроля изменения параметров подключены к соответствующим входам блоков логики и достоверности контроля, при этом выход датчика напряжения задатчика интенсивности подключён к первому входу блока контроля.изменения параметров регулятора напряжения, ко второму входу которого и вторым входам остальных блоков контроля изменения параметров подключен выход датчика напряжения регулятора напряжения, к третьi им и четвертьм входам всех блоков (Л контроля изменения параметров подключены выходы датчика напряжения генератора и датчика тока, к пятым входам блоков контроля изменения параметров регулятрра тока тиристорного преобразователя, датчика тока, датчика напряжения генератора и исполнительного механизма подключен выход датчика напряжения регу42i k лятора тока, к шестьм входам блоков контроля изменения параметров СП регулятора тока, датчика напряжео Б ния и исполнительного механизма подключен выход датчика оборотов 09 двигателя, выход датчика напряжения возбуждения генератора подключен к шестым входам блQкoв контроля изменения параметров датчика тока, тиристорного преобразователя и к седьмым входам датчика напряжения и ис: полнительного механизма , к вось,мому входу последнего подключен выход блока определения возмущения .
Изобретение относится к горной автоматике и может быть использовано для определения работоспособности систем управления экскаваторов-драглайнов в процессе их функционирования.
31
Известно устройство оперативного дистанционного контроля работы землеройных машин, содержащее измерители мощности механизмов, выполненlaie в виде вибрационных датчиков, генератора импульсов, накопители времени работы вхолостую, накопител времени работы под нагрузкой lj .
Устройство оценивает общую производительность экскаватора за промежуток времени, что является косвенной общей оценкой работы системы управления электроприводом поворота
Недостатком данного устройства является косвенная оценка работоспособности системы управления электроприводом поворота, невозможность определения появления неисправности в системе управления электроприводом поворота экскаватора.- . .
Известно также устройство контроля системы управления электроприводом поворота экскаватора-драглайна, включающее тахогенератор, датчик оборотов двигателя 2j .
В устройстве оценкой работоспособности системы управления электроприводом поворота является сравнени средней потребляемой мощности привода поворота с заданной, т.е. недостатком этого устройства является косвенный контроль работоспособности системь управления, а тагане невозможность определения неисправности, вида и места возникновения в системе управления.
Известно устройство для автоматизированного управления электроприводом экскаватора-драглайна, содержащее блок логики, блок достоверности контроля и блок датчиков параметров (з.
Однако известное устройство обладает невысокой точностью управления так как оно лишь фиксирует факт неисправности и срабатывает при достижении аварийных значений выходных сигналов, определяя при этом только причины уже происшедших аварий в объекте контроля.
Цель изобретения - повышение точности управления за счет контроля вида и места дефекта в устройстве управления электроприводом в процессе функционирования.
Поставленная цель достигается тем, что устройство для автоматизи50934
рованного управлений электроприводом экскаватором-драглайном, содержащее блок логики, блок достоверности контроля и блок датчиков параметров, снабжено последовательно соединенными вторыми выходами блока контроля изменения параметров регулятора напряжения, регулятора тока, тиристорного преобразователя, датчиfO ка тока, датчика напряжения генератора, исполнительного механизма, а блок датчиков пара метров включает датчики напряжения генератора, возбуждения генератора, регулятора тоf5 ка, регулятора напряжения и задатчика интенсивности, блок определения во змзтцвния, к первому и второму входам которого подключены соответственно выходы датчика оборотов 20 двигателя и датчика тока, первые выходы всех блоков контроля изменения параметров подкл1эчены к соответств пощим входам блоков логики и достоверности контроля, при этом
5 выход датчика напряжения задатчика интенсивности подключен к первому входу блока контроля изменения параметров регулятора напряжения, ко второму ВХОДУ которого и-вторым 0 входам остальных блоков контроля изменения па;раметров подключен выход датчика напряжения регулятора напряжения, к третьим и четвертым входам всех блоков контроля изменения параметров подключены выходы датчика напряжения генератора и датчика тока, к пятым входам блоков контроля изменения параметров регулятора тока, тиристорного преобразо.Q вателя, датчика тока, датчика напряжения генератора и исполнительного механизма подключен выход датчика напряжения регулятора тока, к шестым входам блоков контроля изменения .- параметров регулятора тока, датчика напряжения и исполнительного механизма .подключен выход датчика оборотов двигателя, выход датчика напряжения возбуждения генератора подключен Q к шестым входам блоков контроля изменения параметров датчика тока, ти-, ристорного преобразователя и к седьмым входам датчика напряжения и исполнительного механизма, к восьмому
, входу последнего подключен выход блока определения возмущения.
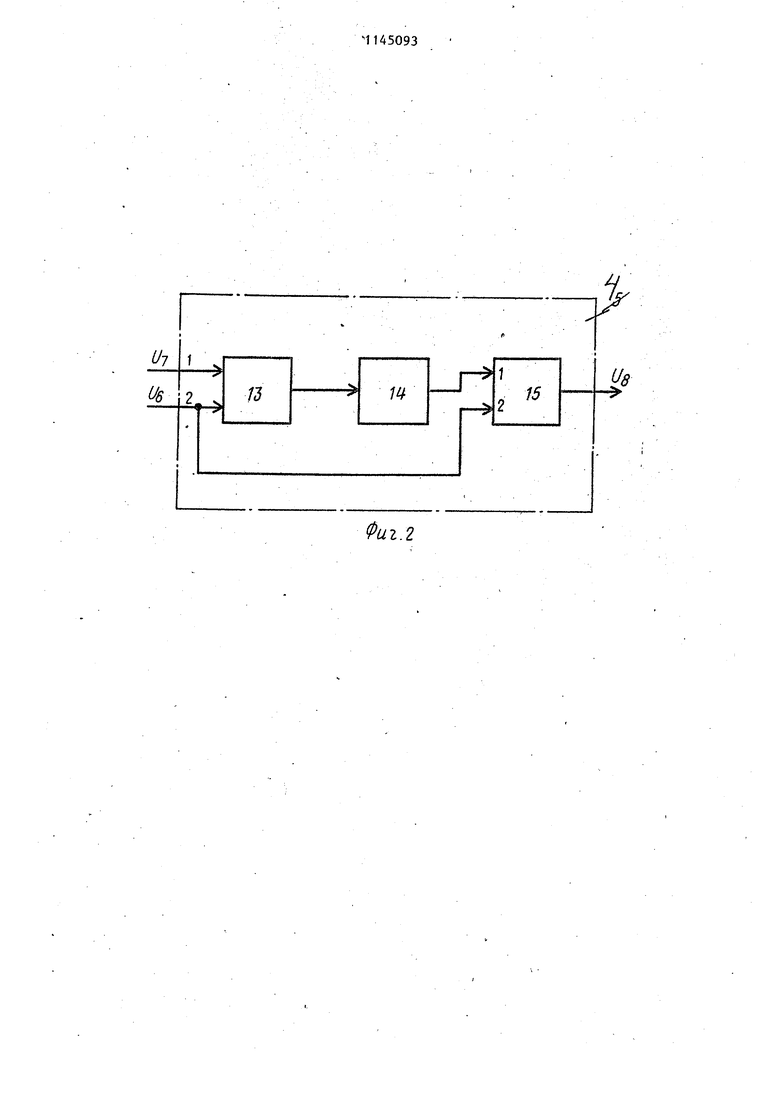
При этом, блок определения возмущения вьтолнен в виде последовательо соединенных первого сумматора, нерционного звена и второго сумматоа, выход которого является выходом лока, а второй его вход соединен вторым входом первого сумматора, 5 ервьЕЙ и второй входы которого являтся соответственно первым и вторым ходами блока.
Блок контроля изменения параметров регулятора напряжения выполнен 10 виде сумматора, инвертирующего интегратора, двух инвертирующих сумматоров и компаратора, ко входу которого подключен выход сумматора, к первому входу которого подключен выход 15 инвертирующего интегратора, ко второму входу подключен выход инвертирую-щего сумматора, а третий вход соединен с первым входом второго инвертирующего сумматора, выход которого 20 подключен к одному из входов инвертирующего интегратора, второй вход которого является первым входом блока, вторым входом Которого является третий вход сумматора, третьим и четвер-25 тым входом является второй и первый входы первого инвертирующего сумматора, соединенные соответственно с третьим и вторым входами второго инвертирующего сумматора, а выходы ЗО компаратора и инвертир тощего интегратора являются соответственно первым и вторым выходами блока.
Блок контроля изменения.параметров регулятора тока вьтолнен в виде 35 двух сумматоров ,i инвертора, интегратора, инвертирующего сумматора и компаратора, ко входу которого подключен выход первого сумматора, к первому входу которого подключен выход 0 интегратора, ко второму входу подключен выход инвертора, третий вход соединен с третьим входом второго сумматора и является вторым входом блока, второй вход второго сумматора 5 является шестым входом блока, первый, вход второго сумматора соединен с выходом второго инвертирующего сумматора, первый и второй входы которого являются -Третьим и четвертым 50 входами блока, пятым входом которого является третий вход инвертирующего сумматора, соединенный с входом инвертора, выходы компаратора и интегратора являются соответственно 55 первь1м и вторым выходами блока.
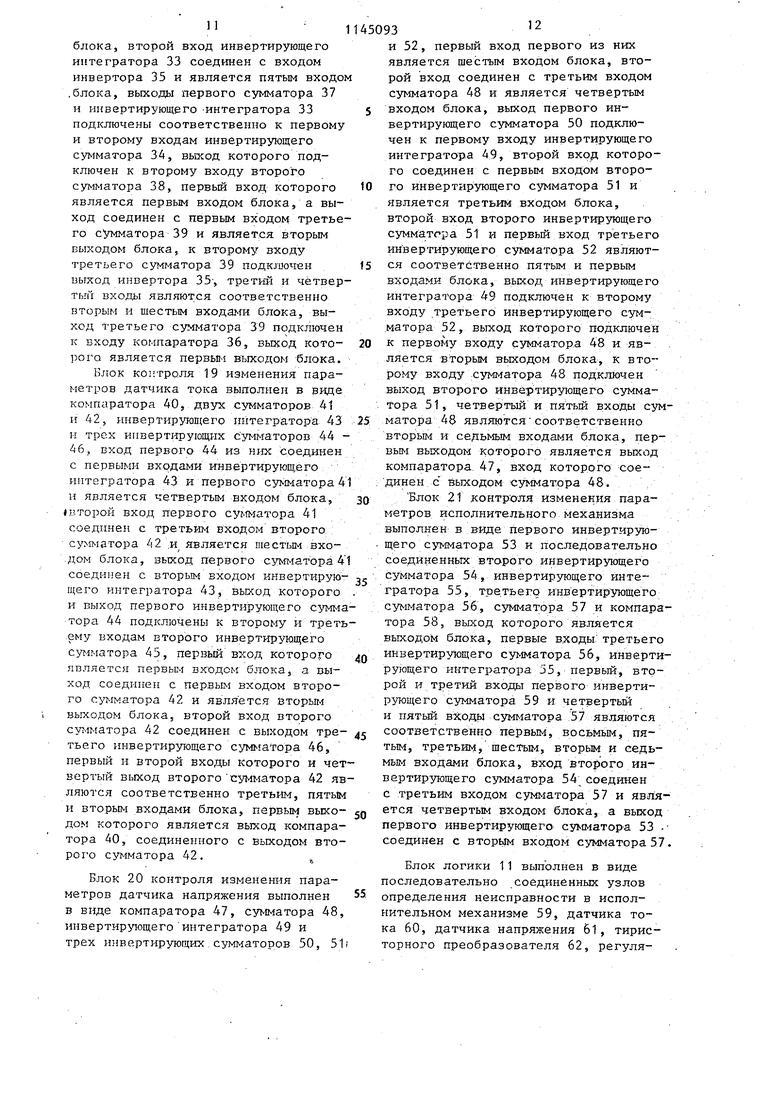
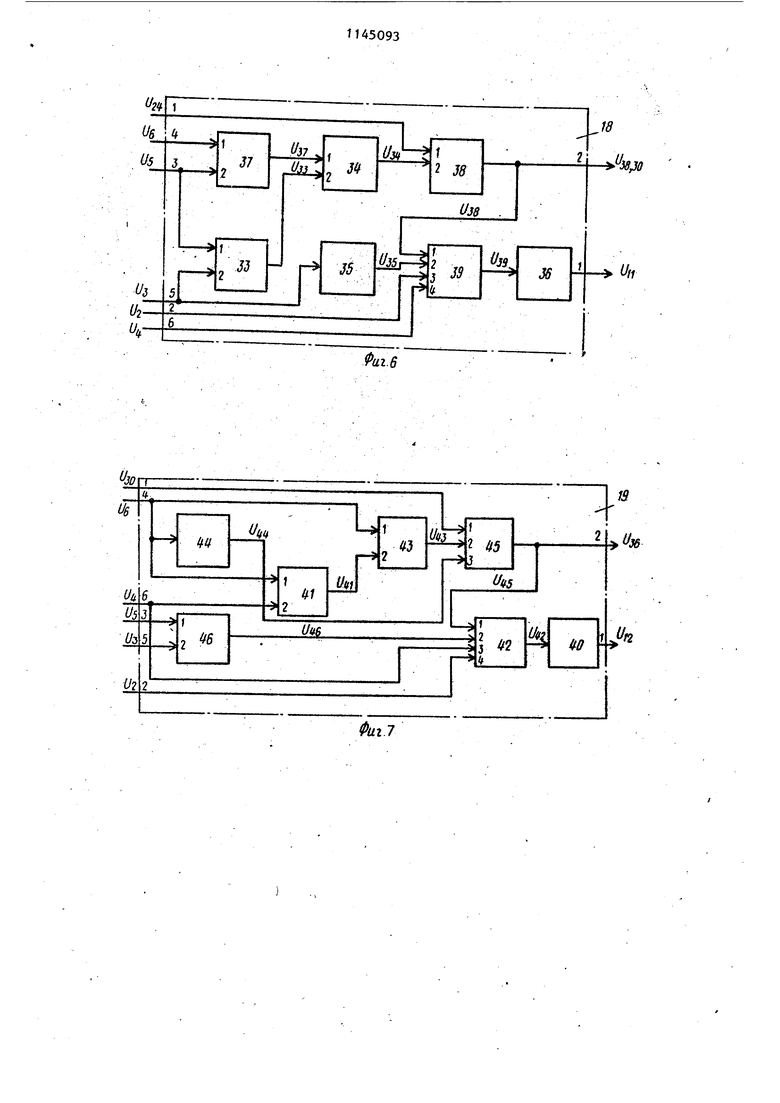
Блок контроля изменения параметров тиристорнога преобразователя выполнен в виде инвертирующего интегратора, инвертирующего сумматора, инвертора, компаратора и трех сумматоров, первый вход первого сумматора является четвертым входом блока, второй вход первого сумматора соединен с первым входом инвертирующего интегратора и является третьим входом блока, второй вход инвертирующего интегратора соединен с входом инвертора и является пятым входом блока, выходы первого сумматора и инвертирующего интегратора подключены соответственно к первому и второму входам инвертирующего сумматора, выход которого подключен ко второму входу второго сумматора, первый вход которого является первым входом блока, а выход соединен с первым входом третьего сумматора и является вторым выходом блока, ко второму входу третьего сумматора подключен выход инвертора, третий и четвертый входы :являются соответственно вторым и шестрым входами блока, выход третьего сумматора подключен ко входу компаратора, выход которого является первым выходом блока.
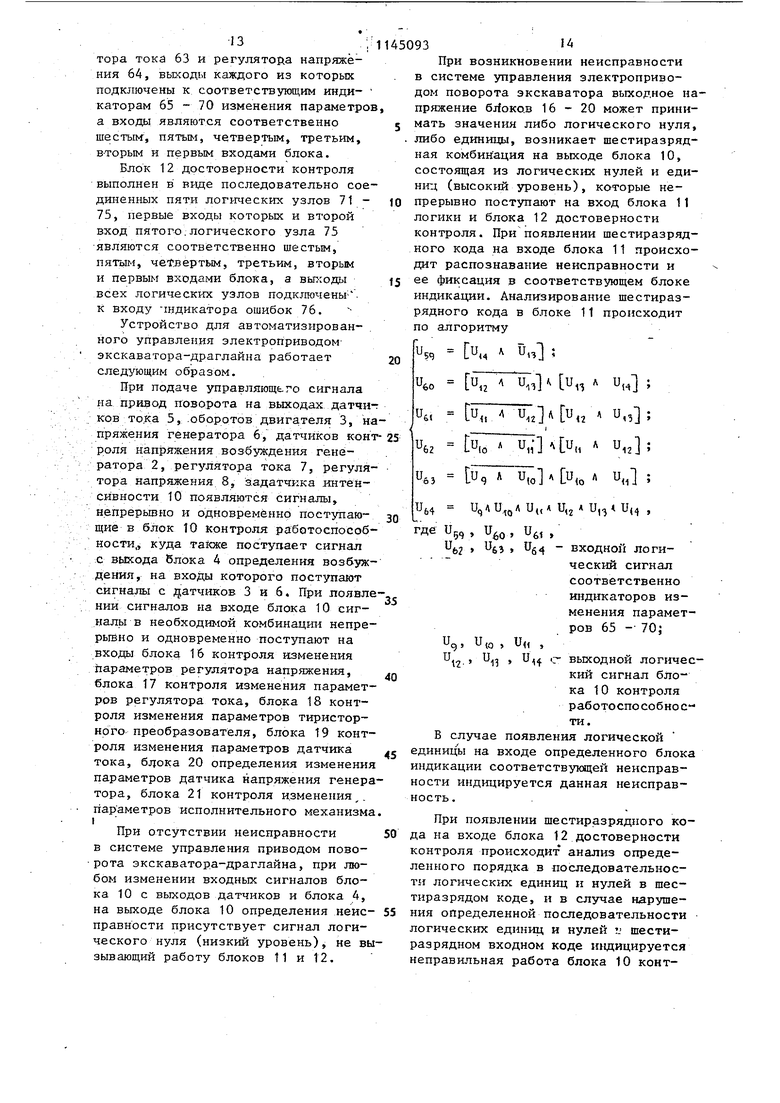
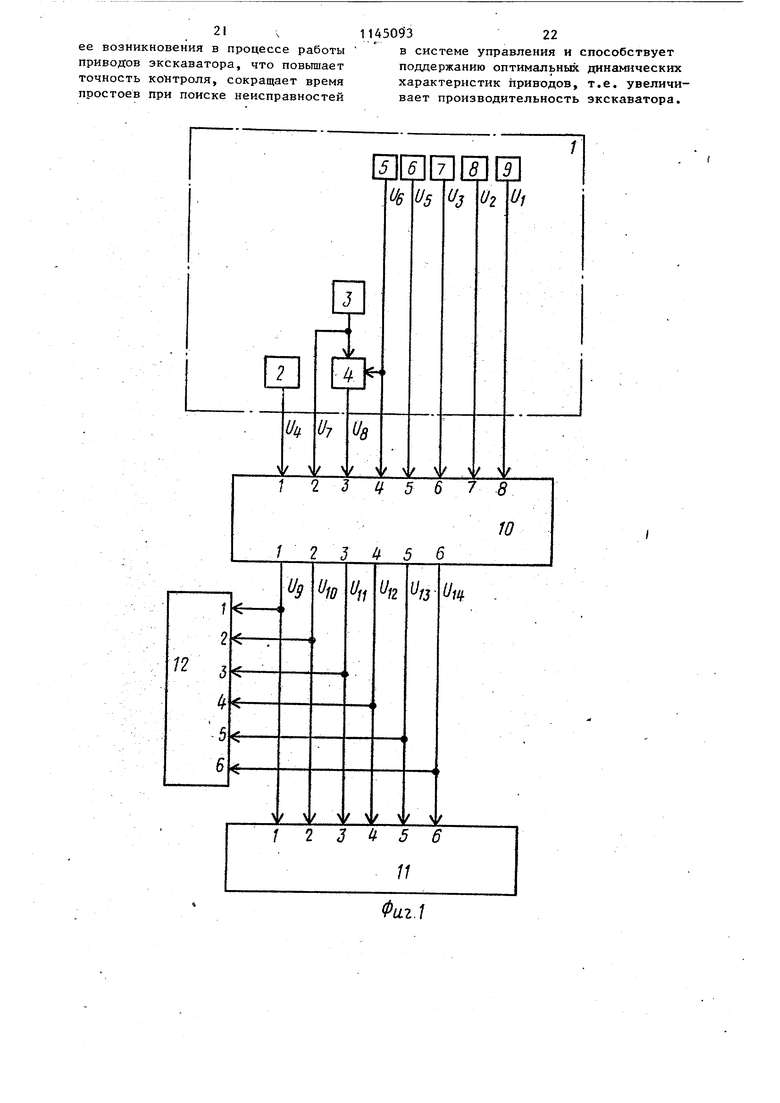
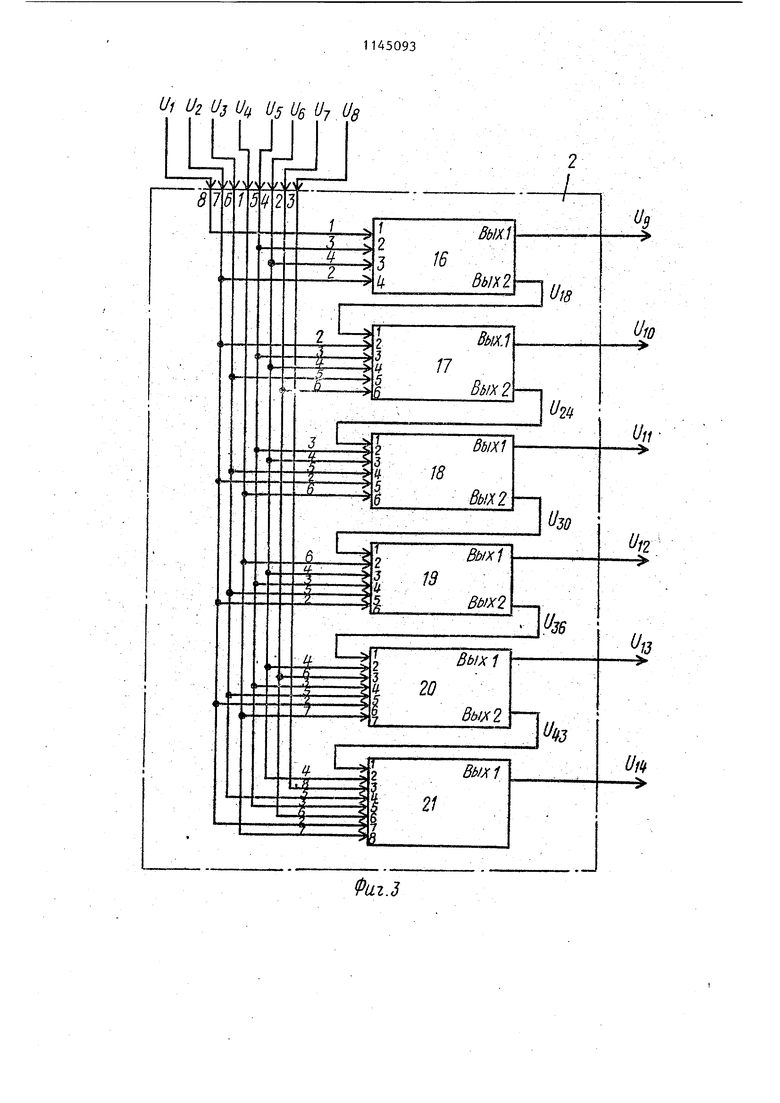
Блок контроля изменения параметров датчика тока выполнен в виде компаратора, двух сумматоров, инвертирующего интегратора и трех инвертирующих сумматоров, вход первого из них соединен с первыми входами инвертирующего -интегратора и первого сумматора и является четвертым входом блока, второй вход первого сумматора соединен с третьим входом второго сумматора и является шестым входом блока, выход первого сумматора соединен с вторым входом инвертирующего интегратора, выход которого и выход первого инвертирующего сумматора подключены ко второму и третьему входам второго интертирующего сумматора, первый вход которого является первым входом блока, а выход соединен .с первым входом второго сумматора и является вторымВЫХОДОМ блока, второй вход второго сумматора соединен с выходом третьего инвертирующего сумматора, первый и второй входы которого и четвертый выход второго сумматора являются соответственно третьим, пятым и вторым входами блока, первым выходом которого является выход компаратора, соединенного с выходом второго сумматора. 7 Блок контроля изменения параметров датчика напряжения выполнен в ви де компаратора, сумматора, инвертирующего интегратора и трех инвертирующих сзтмматоров , первый вход первого из них является шестым входом блока,.второй вход соединен с третьим входом сумматора и является четвертым входом блока, выход первого инвертирующего сумматора; подключен к первому входу инвертирующего инте гратора, второй вход которого соединен , с первьм входом .второго инвертируюп его сумматора и является TpeTbiiM входом блока, второй.вход второго ннвертпруюп его сумматора, и первый вход третьего инвертирующего суммато ра являются соответственно пятым и: первым входами блока, выход инвертирующего интегратора подключенко.кто рому входу третьего инвертирующего су1..матора, выход которого подключен к первому входу сумматора и является вторым вькодом блока,, ко второму , входу су матора подключен выход второго, инвертирующего сумматора, чет вертый и пятый входы сумматора являются соответственно вторым и. седь,ьшм входаьш блока, первым вьпсодом которого является выход.компаратора вход крторого,, соединен с выходом . сумматора. : : . ,. .: . Блок контроля изменения параметров исполнительного механизма вы-полнен в виде первого :инвертирующего. сумматора, и последовательно . соединенных второго инвер-т-ирующего румматора, инвертирутощего интегра- тора, третьего шшертируюя его, сумматора, сумматора и компаратора, выход которого является выходом блока, первые ВХОДЫ- третьего ин- вертирующего сумматора, инвертирующего интегратора, первый, второй -И : третий входы первого шшертирующего -.. с; мматора и четвертый и пятый входь сумматора являются соотввтственно первым, восьмым, пять1м, третьим, .ше тьм, вторым и седьмым входами блока вход второго ннвертирузоще.го суммато pa соединен с третьим .входом суммат ра и является, четвертым входом блок а выход первого инвертирующего сумматора соединен с вторым входом сзмматора. Блок логики выполнен в виде посл довательно соединенных узлов опреде ления неисправности в исполнительз. 93 ном механизме, датчика тока, датчика напряжения, тиристорного преобразователя, регулятора тока и регулятора напряжения, выходы каждого из которых подключены к соответствующим индикаторам изменения параметров, а входы являются соответственно шестым, пятым, четвертым, третьим, вторь м и первым входами блока. Блок достоверности .контроля выполнен в виде последовательно соединенных ПЯ1И: логических узлов, первые входы которых и второй вход пятого логического узла являются соответственно Щестым, пятым, четвертым, третьим, вторым и первым входами блока, а вьк.оды всех логических узлов подключены ко входу индикатора ошибок. На фиг, 1 изображена блок-схема устройства; на фиг. 2 - схема блока определения возмущения; на фиг, 3 схема блока контроля работоспособности; на фр1г, 4 - схема блока контроля изменения параметров напряжения; на фиг, 5 - сх.ема блока контроля изменения параметров регулятора тока; на фиг, 6 - схема блока контроля изменения параметров тиристорного преобразователя; на фиг, 7 - схема блока контроля изменения параметров датчика тока; на фиг. 8 - с.хема блока .контроля, изменения, параметров датчика напряясения генератора; на фиг. 9 -схема блока контроля изменения /параметров в исполнительном механизме; на фиг, 10 .- вариант блока логики; на фиг. 11 - вариант блока достоверности контроля. . Устройство для автоматизированного управления эл.ектроприводом поворота экскаватора-драглайна У(фиг. 1) содержит блок напр.яжения датчиков параметРОВ:. 1,, включающий, в себя датчик 2 напряжения возбуждения генератора, датчик 3 оборотов двигателя, подклю.ченный-к первому входу блока 4 определения возмещения ,- ко второму входу которого подключен датчик тока 5, а татсже датчики напряжения генератора 6,: регулятора тока; 7, регулятора напряжения 8 и задатчика интенсивности 9. Устройство включает также блок 10 контроля работоспособности, блок 11 логяки, блок 12 достоверности контроля. Блок 4 определения возмущения выполнен в виде последовательно соединенных первого сумматора 13, инерционного звена 14 и второго сумматора 15, выход которого является выходом блока, а второй его вход соедине с вторым вводом первого сумматора, первый и второй входы которого являются соответственно первым и вторым входом блока. Блок 10 контроля работоспособности состоит из последовательно соеди- ненных одними из входов блоками конт роля изменения параметров регулятора напряжения 16, регулятора тока 17 тиристорного преобразователя 18, дат чика тока 19, датчика напряжения .генератора 20, исполнительного механизма 21J первые выходы которых подключены к соотзетствзпшдам входам блоков логики 11 и достоверности контроля 12. При этом выход датчика 9 напряжения з адатчика интенсивности подклйчен к перво1/у входу блока 16 контроля изменения параметров регулятора напряжения, к второму входу которого и вторым входам остал ньп: блоков контроля изменения, параметров подключен выход да.тчика 8 напряжения регулятора напряжения, к третьим и четвертым входам всех блоков контроля изменения параметров подключены выходы датчиков 6 напряжения генератора и датчика 5 тока,, к пятым вводам блоков контроля изменения параметров регулятора тока .17, тиристорного преобразователя 18, датчика тока 19, датчика напряжения генератора 20 и исполнительного меха низма 21 подключен выход датчика 7 напряжения регулятора тока, к шестым входам блоков контроля изменения параметров регулятора тока 17, датчика напряжения 20 и исполнительного механизма 21 подключен выход датчика 3 оборотов двигателя, выход датчи ,ка 2 напряжения возбуждения генаратора подключен к шестым входам блоко контроля изменения параметров датчика тока 17, тиристорного преобразова теля и к седьмым входам датчика напряжения 20 и исполнительного механизма 21, к восьмому входу последнего подключен выход блока 4 определения возмущения. Блок 16 контроля изменения параме ров регулятора напряжения выполнен в виде сумматора 22, инвертирующего интегратора 23, двух инвертирующих сумматоров 24 и 25 и компаратора 26 к входу которого подключен выход сумматора 22, к первому входу которого подк1почен выход первого инвертирующего интегратора 23, к второму входу подключен выход первого инвертирующего сумматора 24, а третий вход -соединен С первым входом инвертирую его сумматора 25, выход которого подключен к одному из входов инвертирующего интегратора 23, второй вход которого является первым входом блока, вторым входом которого является третий вход сумматора 22, третьим и четвертым входом является второй и первый входы первого инвертирующего сумматора 24, соединенные соответственно с третьим и вторым входами второго инвертирующего сумматора 25, а выходы компаратора 26 и иквертирующего интегратора 23 являются соответственно первым и вторым выходами блока. Блок 17 контроля изменения параметров регулятора тока выполнен в виде двух -сумматоров 27 и 28, инвертора 29, интегратора 30, инвертирующего сумматора 31 и компаратора 32, ко входу которого подключен выход первого сумматора 27, к первому входу которого подключен выход интегратора 30, к второму входу подключен выход инвертора 29, третий вход соединен с третьим входом второго сумматора 31 и является вторым входом блока, второй вход второго сумматора 28 является шестым входом блока, первый вход второго суь1мато ра 28 соединен с выходом второго ifH в ер тирующего сумматора 31, первый и второй вход которого является третьим и четвертым входами блока, пятым входом которого является третий вход второго инверт1фующего сумматора 31, соединенный с входом инвертора 29, выходы компаратора. 32 и интегратора 30 являются соответственно первым и вторым выходами блока. Блок 18 контроля изменения параметров тиристорного преобразователя выполнен в виде инвертирующего интегратора 33, инвертирующего сумматора 34, ийвертора 35, компаратора 36 и трех сумматоров 37, 38 и 39, первый вход первого сумматора 37. является четвертым входом блока, второй вход первого сумматора 37 соединен с первьм входом инвертирующего инте- гратора 33 и является третьим входом 11 блока, второй вход инвертирующего интегратора 33 соединен с входом инвертора 35 и является пятым входом .блока, выходы первого сумматора 37 и инвертирующего -интегратора 33 подключены соответственно к первому и второму входам инвертирующего сумматора 34, выход которого подключен к второму входу второго сумматора 38, первый вход которого является первым входом блока, а выход соединен с первым входом третьего сумматора 39 и является вторым выходом блока, к второму входу третьего сумматора 39 подключен вьгход инвертора 35-, третий и четвер тый входы являются соответственно вторым и шестым входа {и блока, выход третьего сумматора 39 подключен к входу компаратора 36, выход кото)ога является первьп--5 выходом блока. Блок контроля 19 изменения параметров датчика тока выполнен в виде компаратора 40, двух сумматоров 41 II 42, инвертирующего интегратора 43 и трех инвертирующих сумматоров 44 46, вход первого 44 из ннх соединен с первыми входами инвертирующего интегратора 43 и первого сумматора 4 и является четвертым входом блока, 1ВТОРОЙ вход первого сумматора 41 соединен с третьим входом второго су шатора 42 и является пшстьм вхо-дом блока, выход первого сумматора 4 соединен с вторым входом инвертирующего интегратора 43, выход которого и выход первого инвертирующего сумма тора 44 подключены к второму и треть .ему входам второго инвертирующего cyj-iMaTopa 45, первый вход которого является первым входом блока, а выход соединен с первым входом второго сумматора 42 и является вторым выходом блока, второй вход второго су7 1матора 42 соединен с выходом третьего инвертирующего сумматора 46, первый и второй входы которого и чет вертый выход второгосумматора 42 яв ляются соответственно третьим, пятым и вторым входами блока, первым выходом которого является выход компаратора 40, соединенного с выходом второго сумматора 42.. Блок 20 контроля изменения параметров датчика напряжения выполнен в виде компаратора 47, сумматора 48 инвертир пощегоинтегратора 49 и трех инвертирующих,сумматоров 50, 51 и 52, первый вход первого из них является шестым входом блока, второй вход соединен с третьим входом сумматора 48 и является четвертым входом блока, выход первого инвертирующего сумматора 50 подключен к первому входу инвертирующего интегратора 49, второй вход которого соединен с первым входом второго инвертирующего сумматора 51 и является третьим входом блока, второй вход второго инвертирующего сумматгр-а 51 и первый вход третьего инвертирующего сумматора 52 являются соответственно пятым и первым входами блока, выход инвертирующего интегратора 49 подключен к второму входу третьего инвертирующего сумматора 52 , выход которого подключен к первому входу сумматора 48 и является вторым выходом блока, к второму входу сумматора 48 подключен выход второго инвертирующего суммаТора 51, четвертый и пятый входы сумматора 48 являютсясоответственно вторым и седьмым входами блока, первым выходом которого является выход компа ратора 47, вход которого соединан, с выходом сумматора 48. Блок 21 контроля изменения параметров исполнительного механизма выполнен в виде первого инвертирующего сумматора 53 и последовательно соединенных вто-рого инвертирующего сумматора 54, инвертирующего интегратора 55, тре.тьего инвертирующего сумматора 56, сумматора 57 и компаратора 58, выход которого является выходом блока, первые входы- третьего инвертирующего сумматора 56, инвертирующего интегратора 55, первый, второй и третий входы первого инвертирующего сумматора 59 и четвертый и пятый входы сумматора .57 являются соответственно первым, восьмым, пятым, третьим, шестым, вторым и седьмым входами блока, вход вто|)ого инвертирзтощего сумматора 54 соединен с третьим входом сз мматора 57 и является четвертым входом блока, а выход первого инвертирующего сумматора 53 - соединен с вторым входом сумматора 57. Блок логики 11 выполнен в виде последовательно соединенных узлов определения неисправности в исполнительном механизме 59, датчика тока 60, датчика напряжения б1, тиристорного преобразователя 62, регуляния 64, выходы каждого из которых подключены к соответствующим инди- каторам 65 - 70 изменения параметров а входы являются соответственно шестым, пятым, четвертым, третьим, вторым и первым входами блока. Блок 12 достоверности контроля выполнен в Bi-ще последовательно соединенных пяти логических узлов 71 75, первые входы которых и второй вход пятого.логического узла 75 являются соответственно шестьм, пятым, четвертым, третьим, вторьм и первым входами блока, а вы7:оды всех логических узлов подключены-, к входу -щдикатора ошибок 76. Устройство для автоматизированного управления электроприводомэкскаватора-драглайна работает следующим образом. При подаче управляющего сигнала на привод поворота на выходах датчи ков тока 5, оборотов двигателя 3, н пряжения генератора 6, датчиков кон роля напряжения возбуждения генератора 2 , регулятора тока 7, регуля тора напряжения 8, задатчкка интенсивности 10 появляются сигналы, непрерьщно и одновременно поступающие в блок to контроля работоспособ ности,, куда также поступает сигнал с выхода блока Д определения возбуж дения, на входы которого поступают сигналы с датчиков 3 и 6. При появл НИИ сигналов на входе блока 10 сигналы в необходимой комбинации непре рывно и одновременно поступают на входы блока 16 контроля изменения параметров регулятора напряжения, блока Т7 контроля изменения парамет ров регулятора тока, блока 18 контроля изменения параметров тиристорного преобразователя, блока 19 конт роля изменения параметров датчика тока, 6jioKa 20 определения изменени параметров датчика напряжения генер тора, блока 21 контроля изменения,, параметров исполнительного механизм При отсутствии неисправности в системе управления приводом поворота экскаватора-драглайна, при любом изменении входных сигналов блока 10 с выходов датчиков и блока 4,
на выходе блока 10 определения йене- 55ния определенной последовательности
правности присутствует сигнал логи-логических единиц и нулей TJ шестического нуля (низкий уровень), не вы-разрядном входном коде индицируется
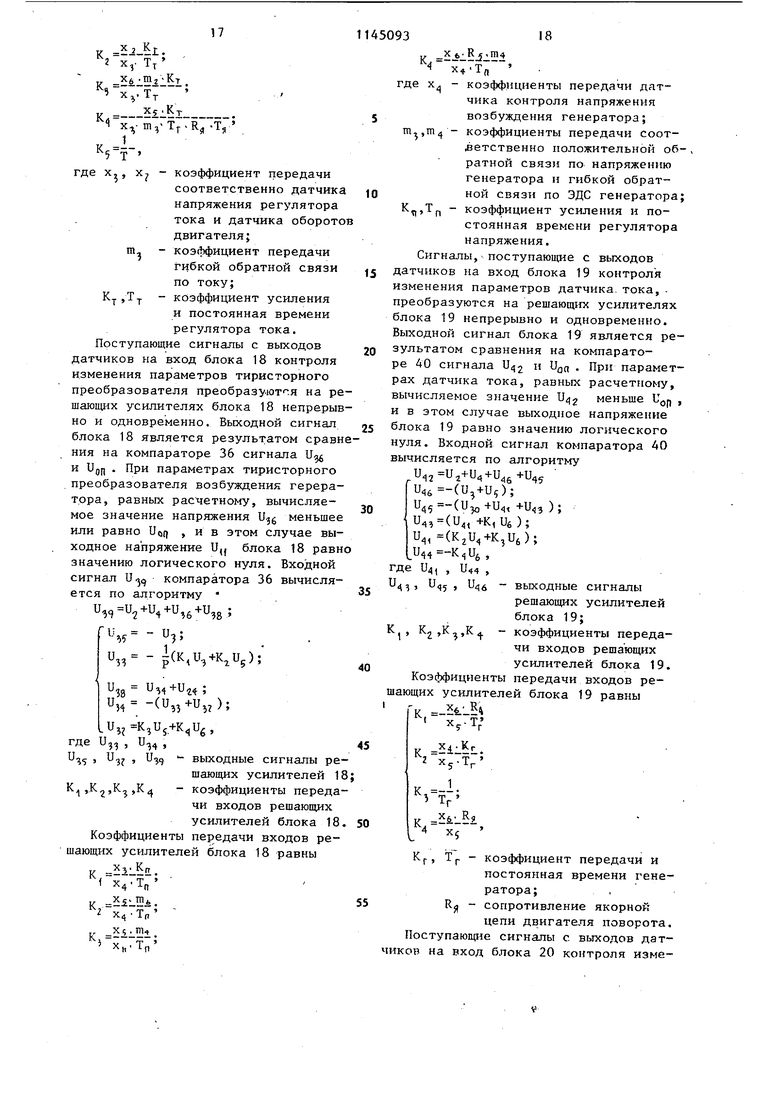
зывающий работу блоков t1 и 12. неправильная работа блока 10 контв системе управления электроприводом поворота экскаватора выходное напряжение блоков 16 - 20 может принимать значения либо логического нуля, либо единицы, возникает шестиразрядная комбинация на выходе блока 10, состоящая из логических нулей и единиц (высокий уровень), которые непрерывно поступают на вход блока 11 логики и блока 12 достоверности контроля. При появлении шестиразрядного кода на входе блока 11 происходит распознавание неисправности и ее фиксация в соответствующем блоке индикации. Анализирование шестиразрядного кода в блоке 11 происходит по алгоритму ческий сигнал соответственно индикаторов изменения параметров 65 - 70; , и i:- выходной логический сигнал блока 1 О контроля работоспособное ти. В случае появления логической единицы на входе определенного блока индикации соответствующей неисправности индицируется данная неисправность. При появлении шестиразрядного кода на входе блока 12 достоверности контроля происходит анализ определенного порядка в последовательности логических единиц и нулей в шестиразрядом коде, и в случае наруше15роля работоспособности. Анализ шес разрядного кода с целью выявления неправильности работы блока 10 кон роля работоспособности в блоке 12 происходит по следующему алгоритму )V(U.QAUM ) U(UgUJ,0 У(и„д у„ )v(U,3A и,, )V v(U,AU, ), где и,, - входной логический сигна индикатора ошибок 76 раб ты блока 10 контроля раб тоспособности . Если и принимает значения логической единицы, в индикаторе оши бок 76 индицируется неправильная работа блока 10.. Блок 10 контроля работоспособности работает следующим образом. Поступающие сигналы с выходов датчиков на вход блока 16 контроля изменения параметров регулятора напряжения преобразуются на решающих усилителях блока 16 непрерывно и одновременно. Выходной логический сигнал блока 16 является резул татом сравнения на компараторе 26 сигнала U 2 и опорного напряжения Ugq . При параметрах регулятора напряжения, равных расчетному, вычисляемое значение напряжения Ug меньше или равно UQJ, , и в этом слу чае выходное напряжение блока 1 равно логическому нулю. Входной си нал у2 компаратора 26 вычисляется по алгоритму 22 ,, +Uj3 , я - b s i+Uzs); 25 - (.Ug); U - (), где U , и„. - выходные сигналы со ветствующих усилите лей блока 16, К(, К, К - коэффициенты переда входов решающих уси лителей блока 16. Коэффициенты передачи входов ре шающих усилителей равны K, К . .Т X J 1 Ц ,. Х4. К„ 5 I XJ/TH .. Хг- Тн X,, Х2, х, х - коэффициенты передачи соответственно датчиков напряжения задатчика интенсивности и регулятора напряжения, датчиков напряжения генератора и тока; - коэффициент передачи, пропорциональный гибкой обратной связи по напряжению генератора; К,Т - коэффициент усиления и постоянная времени регулятора напряжения. оступающие сигналы с выходов чиков на вход блока 17 контроля нения параметров регулятора тореобразуются на решающих усилих блока 17 непрерывно и- одноврео. Выходной сигнал блока 17 явся результатом сравнения на коматоре 32 сигнала Uj и опорного яжения 1} . При параметрах регура тока, равньк расчетному, выяемое значение напряжения U ше или равно 1 , и в этом слувыходное напряжение блока 17 о логическому нулю. Входной ал. компаратора 32 вычисляето зависимости ,+и„+и„. ад - ..); и,, -(,U5); UZ9 -Ч и., , Ujg, Uz9 , и ад выходные сигналы решающих усилителей блока 17; К , К, К, К, К - коэффициенты передачи входов решающих усилителей блока 17. оэффициенты передачи входов рех усилителей блока равны 2 С.х. . R. Т, .т .X К . 2 т SilEil I хуТт ., 5 где Xj, х - коэффициент передачи соответственно датчик напряжения регулятора тока и датчика оборот двигателя; т- - коэффициент передачи гибкой обратной связи по току; К,Т-г - коэффициент усиления и постоянная времени регулятора тока. Поступающие сигналы с выходов датчиков на вход блока 18 контроля изменения параметров тиристорного преобразователя преобразуют .я на р шающих усилителях блока 18 непреры но и одновременно. Выходной сигнал блока 18 является результатом срав ния на компараторе 36 сигнала U и Ujfi . При параметрах тиристорного преобразователя возбуждения герера трра, равных расчетному, вычисляемое значение напряжения меньше или равно Uo(j , и в этом случае вы ходное напряжение U,{ блока 18 рав значению логического нуля. Входной сигнал компаратора 36 вычисля ется по алгоритму ,+U,+U,,+U,g; и,, - и„ - (); и,+и„; и„ -(и„-ьи„); lU,K,U5.-fK,U5, где и , 0,4 , - выходные сигналы р 45 -З шающих усилителей - коэффициенты перед чи входов решающих усилителей блока 1 Коэффициенты передачи входов ре шающих усилителей блока 18 равны К . х.Тп к 5lLlSi. Х.Т, x.mi. i v Т Х. If, „ .si - коэффициенты передачи датX, чика контроля напряжения возбуждения генератора; ,m - коэффициенты передачи соответственно положительной обратной связи по напряжению генератора и гибкой обратной связи по ЭДС генератора; ,Тр - коэффициент усиления и постоянная времени регулятора напряжения. Сигналы,V поступающие с выходов чиков на вход блока 19 контроля енения параметров датчика.тока, образуются на решающих усилителях ка 19 непрерывно и одновременно. одной сигнал блока 19 является реьтатом сравнения на компарато40 сигнала 1)42 и . При параметдатчика тока, равных расчетному, исляемое значение 1 меньше , этом случае выходное напряжение ка 19 равно значению логического я. Входной сигнал компаратора 40 исляется по алгоритму ,+ и,+и,,+Ц5 (); (U3o+U,, +и„); U4,(U,, +К,иб); и, (Кги,н-К,иб); U 4 -KiU6, U4, , U44 , ,, и.,5 , выходные сигналы решающих усилителей блока 19; , К2,К,К - коэффициенты передачи входов решающих усилителей блока 19. Коэффициенты передачи входов рещих усилителей блока 19 равны 5i. . Z х.Тр rfp к, 4 Xj Kf, Tp - коэффициент передачи и постоянная времени генератора;RJJ - сопротивление якорной цепи двигателя поворота. Поступающие сигналы с выходов датов на вход блока 20 контроля изменения параметров датчика напряжени генератора преобразуются на решаю щих усилителях блока 20 непрерывно и одновременно. Выходной сигнал бл ка 20 является результатом сравнени на компараторе 47 сигнала и Ujf , При параметрах обратнЪй связи, по напряжению, равньгх расчет ному, вычисляемое значение U;,g меньше 11 , и в этом случае выходн напряжение блока 20 равно значению логического нуля. Входной сигнал U компаратора 47 вычисляется по алго рнтмз U43 U2+U4-bU6+U5,+Uj, 15, -(и,+и); . (u.,,+U36); 1 ..- :p(); (,U,), где .Ufo ,U4q ,; , выходные сигналы реша щих усклителёй блока К,,К2,К - коэффициенты передачи входов решающих усили гелей блока 20. Коэффициенты передачи входов решающих усилителей блока равны -5i.-: . -КЯ+ЕЛ к Ri. ., где Кд - сопротивление участка йкор ной .цепи, с которого снима ется напряжение обратной связи. Поступающие сигналы с выходов да чиков на вход блока 21 контроля изм нения параметров.в исполнительном неханиэме преобразуются на решакнцих усшштелях блока 21 непрерьшно и одновременно. Выходной сигнал блока 21 является результатом Сравнения на компараторе 58 сигнала U и UQ .При расчетных параме ./ pax механизмов поворота вычисляемо значение Ut, меньше Ц UQP , и в ЭТОМ случае выходное напряжение блока 2 равно значению логического нуля. Входной сигнал Uj компаратора 58 вычисляется -по алгоритму ,,+U (и,+и,+иг); (U,,+U5O; (U.+KfUg); 93 -K«u,, где Uj , - выходные сигналы ре55 J шающих усилителей блока 21; К,К2 - коэффициенты передачи входов решающих усилителей блока 21. Коэффициент передачи входов решающих усилителей блока 21 равен W -V- -5iz где J - момент инерции механизма поворота;С - электромагнитная постоянная двигателя поворота. Для пояснения принципа работы устройства контроля системы управления электроприводом поворота экскаватора-драглайна предположим, что произошло.: изменение параметра рёгулятор.а. ..тока системы управления электро- приводомгго.ворота. В этот-; случае на вькоде бясков 17 - 21.возникает логическая единица ; а на .выходе блока 16 - догичехукий ноль, .так .как при вычислении сигнал а параметры регулятора тока -не.входят в коэффициенты решающих усилителей блока 16. Тогда логические сигналы в. блоке 11, поступающие на блоки индикации, . пр инимамт значения 1Г5, 1 л|зО; ../. U6o.DjH Л . .: Ug, Убг ОАЛлрА11 р; U6,{pAl . Uu -Ол1л1л.1 лги 0.Логическая единица (U65) поступает на вхо; блока 69 (фиг. 10) индикации изменения параметров регулятора тока. Логический сигнал в блоке 12 (фиг. 11) в этом случае равен Ur (OAr)v(U1)v(U1)Y(1M).v(1 л1) . 0 На вход блока 76 индикации ошибок работы, блока 10 контроля работоспособности поступает логический ноль. В этом случае нет индикации о неправильной работе блока 10. Из описания работы устройства видно, что в процессе работы прцвода поворота постоянно происходит оценка работоспособности системы управления. Таким образом, предлагаемое техническое решение позволяет мгновенно определить вид неисправности и место
21
ее возникновения в процессе работы приводов экскаватора, что повьшает точность контроля, сокращает время простоев при поиске неисправностей
1145003
22
в системе управления и способствует поддержанию оптимальных дина я1ческих характеристик приводов, т.е. увеличивает производительность экскаватора.
Фи.г.1
Фиг.2
/ Uz УЗ i Us UB O-i. (is
Риг.З
Фиг.1
Фиг. 5
Фаг.В
лг.; - tois
Sx.10-f jEfSbix
11
L
1
Фаг.11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство оперативного дистанционного контроля работы землеройных машин с одномоторным приводом | 1972 |
|
SU473003A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
